
Fターム[3C007DS02]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104) | 複数の把持部を有するもの (214)
Fターム[3C007DS02]の下位に属するFターム
挟持部と吸着部を有するもの (32)
Fターム[3C007DS02]に分類される特許
81 - 100 / 182
搬送装置、搬送方法
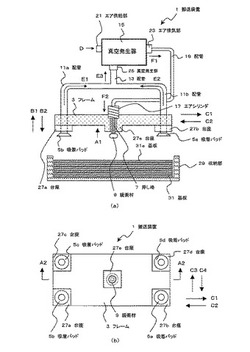
【課題】 構造が簡易で、搬送時に搬送対象とする基板に、他の基板が張り付かないような構造の搬送装置を提供する。
【解決手段】 搬送装置1は、基板31を真空吸着する吸着パッド、基板31を押圧する押し棒7、押し棒7を駆動するエアシリンダ17、エアシリンダ17および吸着パッドに接続された真空発生器15を有している。
搬送装置1を用いて基板31aを搬送する場合は、まず、吸着パッドを、基板31aの上面に接触させる。
次に、真空発生器15にエアを供給して負圧を発生させ、発生した負圧により、吸着パッドが基板31aを真空吸着する。
吸着パッドが基板31aを真空吸着すると、基板31aを持ち上げつつ、真空発生器15より排気されたエアを用いて、エアシリンダ17により押し棒7を移動させて基板31を押圧、変形させ、基板31aと接触していた基板を剥離する。
(もっと読む)
搬送装置、搬送方法、およびデバイス製造方法

【課題】熱などの諸要因によって被保持面が変形した被保持体を、より確実に保持した状態で搬送することができる搬送装置、および搬送方法を提供すること。
【解決手段】被保持物の被保持面に対して保持面を当接させて前記被保持物を保持した状態で搬送する搬送アームAにおいて、該搬送アームAに、ウエハ吸着孔6が設けられたウエハ支持部2を設けるとともに、該ウエハ支持部2をウエハ支持部2の基端部2aを中心に所定の幅だけ回動自在に構成した。
(もっと読む)
平板状保持具の保持装置
【課題】ウェーハと一体で操作される保持具を使用する際、簡単な操作にて保持具を保持することができる保持装置を提供する。
【解決手段】保持装置であるチャック1上面にウェーハ4を載せた平板状保持具3を設置した場合、平板状保持具3の端部近傍に設けられた吸引用配管5の吸入口5aに当接する部分にベローズ6を備え、該ベローズ6はチャック1の上面の端部近傍に設けられた穴1aの底面にその底面6aが設置されており、穴1aの底面からはさらに真空ポンプ(不図示)に連結される配管7aが設けられ、チャック1の上面の中央には、多孔質アルミナ製の円盤1bが、通常のアルミナ製のチャック本体1cにはめこまれ、円盤1bの底部はチャック1の内部に設けられた中空部1dに露出し、中空部1dの底部からは円盤1bを介して平板状保持具3を真空吸着するための配管7bが真空ポンプに連結されている。
(もっと読む)
運搬処理ロボットのための吸引カップを備えるコンパクトツール
本発明は、熱可塑性樹脂材料のタイプの適切な材料から形成されたコンパクトユニットの形態の本体(1)を備えるツールに関するものである。本体(1)は、できる限り吸引カップ(2)に近接して真空発生器を配置するよう構成されている。本体1は、カートリッジ(3)の形態の真空発生器を収容するための穴であって、真空チャンバを規定し、かつカートリッジ(3)の入口に対応する側において圧縮空気供給部と連通しており、かつ他側において、すなわち、カートリッジ(3)の出口に対応する側において、消音器の形態の膨張チャンバ(39)と連通している穴と、一つ以上のキャビティおよび/または開口部を備える、真空チャンバ(44)と吸引カップ(2)との間に非常見に次回内部経路と、を備えている。  (もっと読む)
(もっと読む)
汎用ハンドリング治具
【課題】シンプルな構造の汎用ハンドリング治具を提供する
【解決手段】駆動源によりY方向にスライド伸縮可能な第1サーボ軸11と、駆動源によりZ方向に進退可能な第2サーボ軸12と、第2サーボ軸12を第1サーボ11に連結する解除可能な従動装置13と、Y方向の任意の位置において第2サーボ軸12を固定するためのロック装置14と、第1サーボ軸11に設けられてY,Z方向の双方と垂直をなすように突出形成される第1,第2クランプピンCL1,CL2と、第2サーボ軸12に設けられてY,Z方向の双方と垂直をなすように突出形成される第3クランプピンCL3とを有しており、第2,第3クランプピンCL2,CL3には、ワークのロケート穴に当接して剛性反力を受けた第2,第3クランプピンCL2,CL3が当該剛性反力に従って移動することを許容するロック可能な第1,第2倣い装置がそれぞれ設けられていることを特徴とするハンドリング治具。
(もっと読む)
木材搬送装置
【課題】構造の簡素化を図り、製造コスト及びメンテナンスコストの軽減を実現し得る木材搬送装置を提供する。
【解決手段】木材2の長手方向に離間した少なくとも2つの部位を個別に保持する保持手段8を備え、当該保持手段8は、前記木材2をその長手方向と直角な方向から挿入可能な間隔で配設されると共に互いに平行を成す一対の棒状の保持部材13,13を有し、当該一対の保持部材13,13を、各保持部材13,13に平行な軸線Yを中心に一体的に回動可能に構成した。
(もっと読む)
チャック装置
【課題】ワークをチッャクするチャック装置において、ワークを任意の姿勢で取り置きする。
【解決手段】本体基板11に固定された固定チャックアセンブリ12と、固定チャックアセンブリ12への進退方向にスライドする移動チャックアセンブリ22とを備え、各チャックアセンブリ12,22は、周方向に等間隔に配置され先端からシリンダブロック50のボア51の中に差し込まれる3本のチャックアーム16,26と、ボア51の内面に接してボア51の内面を押圧するチャックツメ17,27と、各チャックアーム16,26の本体基板側端を径方向にスライド可能に支持する支持部と、各チャックアーム16,26を径方向に駆動する空気アクチュエータを備える。
(もっと読む)
義手用アクチュエータユニット
【課題】ねじれ紐式アクチュエータを複数組備えた義手用アクチュエータユニットにおいて、駆動機構部を含む複数のねじれ紐アクチュエータを空間的に効率よく配置することができる構造を提供する。
【解決手段】ねじり紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32とを備え、駆動機構部の作動に伴いねじれ紐1を構成する2本の紐のねじれが強められたり緩められたりすることによりねじれ紐1の長さが変化し、その結果、スライド部材32がねじれ紐1の長手方向に変位する。複数組の長尺状のねじり紐アクチュエータが、略円筒形状の周方向に沿って並ぶように、かつ、各ねじり紐アクチュエータの長手方向が略円筒形状の軸方向に沿うように配置されている。
(もっと読む)
基板移送方法及び基板移送装置
【課題】積み重ねられた複数の基板の最上層の基板をその下層の基板から容易に剥離して引き上げることができる基板移送方法を提供すること。
【解決手段】多数枚積層されるガラス基板積層体8から最上層のガラス基板3を取り出して移送するに際し、最上層のガラス基板3の片隅部20を初めに吸引して引き上げ、その片隅部20を下層の基板3より剥離し、次に、その片隅部20を剥離した状態で、ガラス基板3の剥離した箇所に近接した部位24を吸引して引き上げ、その吸引箇所を下層のガラス基板3より更に剥離する。そして、これを維持した状態で、ガラス基板3の残りの部位を吸引して引き上げ、ガラス基板3全体を下層のガラス基板3より剥離して取り出す。
(もっと読む)
クランプ
【課題】 シリンダ5の推力によらずにワークW狭持位置を確保可能なクランプ。
【解決手段】 シリンダ5、シリンダ5が固定される基台部4と、シリンダヘッド52に固定されワークWを狭持する可動狭持部21を有する可動クランプ把持部2と、一端にワークWを狭持する揺動狭持部34を形成し他端に倣いローラ33を設け中間部31には基台部4と係止可能な揺動基部32を形成する揺動クランプ把持部3と、シリンダヘッド52に固定され揺動クランプ把持部3をガイドする倣いガイド溝61を施した倣いガイド6とからなり、
倣いガイド溝61は、シリンダヘッド2の伸縮方向と角度を有して設ける傾斜部61および同方向と平行に設ける平行部63とから形成され、倣いローラ63がシリンダヘッド53の伸張に伴って倣いガイド溝61の傾斜部62に案内された後平行部63に案内される。
(もっと読む)
ロボットハンド
【課題】小型化および低コスト化を可能とするロボットハンドを提供する。
【解決手段】ロボットハンド1は、ベース2と、フィンガー6〜8と、それぞれ同構成からなる一軸スライダー3〜5とを備える。そして、一軸スライダー3は、位置制御部31と、従動支持部322とを備えている。位置制御部31は、一方向に延伸するレール311と、レール311に沿って移動可能にレール311に支持される移動部312と、レール311における移動部312の位置を制御する駆動部313とを有する位置制御部31とを有し、従動支持部322は、移動部312に従動し、フィンガー6が取り付けられ、フィンガー6を支持する。
(もっと読む)
真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置
【課題】 反った基板を出し入れしたり温度変化により基板が形状変化したりすると真空ピンセットの吸着面が基板を傷つけたり、基板の脱着時に汚れを付着したりして、基板から形成される半導体素子等の歩留まりや信頼性を低下させていた。
【解決手段】 板状体7の先端側が二股状に分岐し、板状体7の先端部および分岐部の各表面の少なくとも3カ所に基板8を吸着する吸着部3を備えるとともに、吸着部3と連通する吸引路4を内設してなる真空ピンセット1において、吸着部3は外側面が吸着面3aに向かって狭まっており、吸着面3aの輪郭が曲線であるものとする。吸着面3aと基板8との接触面積を減少させられるので、基板8を汚染しにくくなる。併せて、吸着面3aの輪郭が曲線であることから、基板8と接触したとしても線接触にならず点接触となるため、基板8を傷つけるおそれを少なくすることができる。
(もっと読む)
ロボットハンド
【課題】複数の把持対象物を同一のハンドで把持できるロボットハンドであり、大きさの異なる複数種類の把持対象物を把持する際に、小さい対象物を把持する際も周囲との干渉を防止できるロボットハンドを提供する。
【解決手段】一対の指3,4及び6,7をそれぞれ開閉し、把持対象物を指で把持可能な把持機構1,2を備えると共に、上記把持機構1,2間の相対位置を変更する相対位置変更用駆動機構9を備えたロボットハンドであって、把持機構1,2は、一対の指と上記一対の指を支持する支持部とで形成される平面PBが、把持機構1,2の各開閉方向A、及び相対位置変更用駆動機構9による把持機構1,2の移動方向Cに沿った面PAに対し交差するように並んだ構成とする。
(もっと読む)
ワーク供給搬出装置
【課題】 複数種のワークに対応可能であり、特に長尺ワークの搬送についても特別の保持機構を必要としないワーク供給搬出装置を提供する。
【解決手段】 ワーク搬入位置Bの未加工ワークw1を工作機械1のワーク加工エリアAに供給するとともに、該ワーク加工エリアAの加工済みワークw2をワーク搬出位置Cに搬出するワーク供給搬出装置3において、支持部材4によって前記ワーク搬入位置Bと前記ワーク加工エリアAとの間及び該ワーク加工エリアAと前記ワーク搬出位置Cとの間で移動可能に支持されたベース部材5と、該ベース部材5に支持され、ワークを把持可能に構成された複数組のワークハンド8,9と、該各ワークハンド8,9同士の間隔をワークの性状に応じて可変とするワークハンド可変機構10とを備える。
(もっと読む)
基板吸着装置及び基板搬送装置並びに外観検査装置
【課題】基板にかかる応力を抑制しつつ確実に吸着保持できるようにする。
【解決手段】外観検査装置1は、基板吸着装置として板金15に固定された3つの吸着部群16A〜16Cを備える。吸着部群16A〜16Cはガラス基板Wの搬送方向に並んで配置されており、各々が3つの吸着部18A〜18Cを備える。吸着部18A〜18Cは、ガラス基板Wの裏面に吸着可能で、首振り動作が可能な吸着パッド22が1つずつ設けられている。最も中央にある吸着部群16Bの吸着部18Bは、上方に押し付け部33が配置されている。押し付け部33は補助パッド35を降下させてガラス基板Wを吸着部18Bに押し付ける。
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
ワーク把持位置決め装置及び把持装置
【課題】ワークの加工装置又は検査装置において、前記フィルム状ワークを2箇所で把持して、X方向及びY方向に加えて回転方向の位置決めもすることができ、小型化及び低コスト化が可能なワーク把持位置決め装置及び把持装置を提供する。
【解決手段】駆動部は、Y方向に延びる1対の平行なYガイド5,12と、Yガイドに沿って移動可能のY台座21,31と、Y駆動部材6,13と、Y台座21,31上に設けられX方向に延びるXガイド2,9と、Xガイドに沿って移動可能のX台座22,32と、X駆動部材3,10と、を有する。把持部1,8は、ワークの一方の面に接触してこれを支持する基部と、ワークの他方に面側に設けられ水平軸を介して揺動可能な爪部材と、この爪部材を揺動させる爪駆動部と、を有し、爪部材は、爪駆動部により基部に向けて揺動したときに基部との間でワークを点で把持する。
(もっと読む)
ガラスシートハンドリング装置
改善された非接触型吊上げツールを用いてガラス基板を搬送する方法。非接触型吊上げツールはガラス基板にかかる圧力差を生じさせるためにベルヌーイ効果を用いる。発明のベルヌーイツールは高められた保持能力すなわち吊上げ能力を有し、ツールがガラス基板面の平面に対して傾けられた場合の、ツールとガラス基板の間の接触の機会を減じる。  (もっと読む)
(もっと読む)
ワーク搬送システムおよびワーク搬送方法
【課題】ワークとハンドとの相対位置が一定にならない場合でも、この把持したワークの位置や姿勢を高精度で制御できるワーク搬送システムを提供すること。
【解決手段】組立てシステム1は、ミラー60を把持するハンド121と、このハンド121の位置および姿勢を変化させるアーム122と、把持されたミラー60をセンシングして、このセンシングしたデータを出力する第2のマニピュレータ13と、これらを制御する制御部70と、を備える。制御部70は、ミラー60の搬送経路についてのティーチングデータを予め記憶しておき、センシングデータに基づいて、ミラー60の位置および姿勢を実測データとして生成し、ミラー60の搬送中、ティーチングデータと実測データとを照合してずれ量を算出し、この算出したずれ量に基づいて、ミラー60の位置および姿勢がティーチングデータに略一致するように、アーム122を制御する。
(もっと読む)
ワーク把持装置
【課題】円筒度が十分でないワークでも、強固にワークを把持することのできるワーク把持装置を提供すること。
【解決手段】回転する主軸3に供給する流体によって軸方向に移動する押圧部材21及び該押圧部材21連結された押圧体20とからなる押圧機構2と、前記押圧体20を軸方向に摺動可能に保持する中空の本体30と、押圧体20の内周面に形成した傾斜面20aに摺接する外周傾斜面7bを有するコレットチャック7とからなり、前記押圧機構2によってコレットチャック7の把持部分7aを主軸軸芯Mに対して軸直角方向に移動させワークWを把持するようにしたワーク把持装置において、前記押圧機構2を同じ主軸軸芯Mとなるように複数組並設して、1個のワークWを長手方向に離間した複数箇所で発生する押圧力によって把持するようにする。
(もっと読む)
81 - 100 / 182
[ Back to top ]