
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
141 - 160 / 834
多関節拮抗制御マニピュレータ
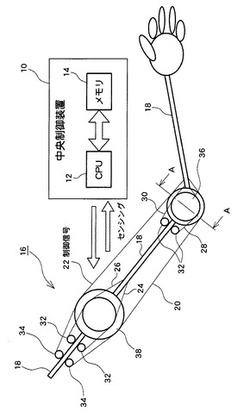
【課題】人間の筋骨格系制御特性を生かし、制御自由度や精度、制御速度を共に満足できる多関節拮抗制御マニピュレータとその制御方法を提供する。
【解決手段】多関節マニピュレータは、中央制御装置10と、多関節マニピュレータ16本体とを有する。多関節マニピュレータ本体16は、人工骨格18と、筋ワイヤ20〜30と、筋ワイヤ制御用モータ32,34を備える。筋ワイヤ20〜30は、二関節筋ワイヤ20,22と、一関節筋ワイヤ24〜28から構成される。中央制御装置10は、記憶装置に記憶された制御関数によって前記一関節筋制御用モータと前記二関節筋制御用モータを併用拮抗制御する。
(もっと読む)
コネクタ自動挿抜装置

【課題】 多数のRFコネクタを有した供試体において、予め手作業でRFコネクタに終端器を装着することなく、複数のRFコネクタに対して終端器を自動挿抜してRFコネクタのRF特性計測を行うコネクタ自動挿抜機構を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を保持器から取り出して把持する把持部と、把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、およびロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】制御対象などの停止位置精度を向上させる。
【解決手段】駆動装置(1A)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(30)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(40)と、駆動部(10)を制御する制御部(500A)と、を含んで構成される駆動装置(1A)であって、第1の位置検出器(30)と第2の位置検出器(40)と制御部(500A)との間において第1の位置情報と前記第2の位置情報とを伝達する伝送路(200A)を備え、制御部(500A)は、位置要求信号に対して互いに同期して検出させた第1の位置情報と記第2の位置情報とのうち少なくとも一方を用いて駆動部(10)を制御する。
(もっと読む)
人工筋肉及び柔軟関節機構
【課題】使用目的・使用状況に応じ剛性を任意に構成可能な駆動機構とそれを用いた柔軟関節機構を提供する。
【解決手段】駆動基盤本体に固定された二台のサーボモータとアームに固定されたプーリとの間を、複数の弾性体を束ねてなる負荷変位特性生成部1013を介して接続し、拮抗機構を構成する。複数の弾性体は例えばゴムであって、長さを異ならせることによって、サーボモータで引張したときに伸び始める点、すなわち発火点が異なるようにする。二台のサーボモータを反対方向に駆動すればプーリが回転し関節が回転する。同一方向に駆動すればプーリすなわち関節は回転しないが負荷変位特性生成部が伸縮し、プーリすなわち関節の回転剛性を可変できる。弾性体が複数あることから負荷変位特性は折れ線とすることができる。
(もっと読む)
把持装置
【課題】簡素な構造からなり、少数のアクチュエーターで駆動することができるとともに、多様な目標物体に対応することができる把持装置を提供する。
【解決手段】把持装置1は、グリッパーの対向する左右の2指がともに平行リンクで構成される。左右の指部25、35の把持面には、薄く細かい物体を捕捉するための爪部が、内側に向かって突出する爪部が、先端縁に沿ってそれぞれ形設されている。爪は、その断面が45度程度の鋭角をなし、開閉方向の内側に向かって突設している。したがって、左右の指部25、35を閉成すると、爪の鋭角な先端が対象物体と接地面の間に潜り込むので、掴み易くなる。
(もっと読む)
回転ダンパーおよびそれを具えるロボット関節駆動装置
【課題】小出力化した柔構造のロボットの関節に用いても、ロボットの通常作動を妨げずに作動停止時の駆動トルクの変動による振動を速やかに減衰させ、作業のタスクタイムを短縮することができる回転ダンパーを提供することにある。
【解決手段】基部材と、前記基部材に対し所定軸線周りに回転可能に配置された回転部材と、前記基部材と前記回転部材との少なくとも一方に固設されるとともに他方へ向けて押圧されて前記他方に摺接し、前記基部材に対する前記回転部材の相対回転に摩擦制動力を与える摩擦部材と、前記摩擦部材に前記他方へ向けて押圧力を加える押圧手段と、前記回転部材の回転速度が上がると前記摩擦部材に加わる押圧力を減少させる押圧力変更手段と、を具えてなる回転ダンパーである。
(もっと読む)
把持装置および把持装置を備えた布地処理ロボット
【課題】簡易な構成で、多種の対象物に対して複数の機能を有した把持装置および把持装置を備えた布地処理ロボットを提供することである。
【解決手段】把持装置200は、固定把持部材240、可動把持部材261、スライド装置220、把持本体部210およびモータ270からなる。把持装置200においては、把持本体部210に固定された固定把持部材240に対して、スライド装置220により可動把持部材261を直線的に移動させ、かつモータ270により可動把持部材261を回動することにより固定把持部材240の先端部および可動把持部材261の先端可動部材262を近接させ、対象物である布地(洗濯物)を把持するものである。
(もっと読む)
把持動作機能を備えるロボットフィンガーユニット
【課題】把持動作機能を備えるロボットハンド全体の体積が小さく、フィンガー動作の自由度と把持力が高いロボットフィンガーユニットを提供する。
【解決手段】ベースと、当該ベースに固定した、回転軸を備える駆動機構と、片端側を回転軸と平行に設置した平行車軸を介し、平行車軸を回転軸として回転運動可能にベースに設置した第1部材と、第1部材の他端側に、回転軸と垂直に設置した垂直車軸を介し、垂直車軸を回転軸として回転運動可能に第1部材と連結した第2部材と、垂直車軸に垂直車軸を回転軸として回転可能に設置した滑車と駆動ケーブルとを備え、駆動ケーブルは、回転軸に巻き付けて固定した片端部と第2部材に固定した他端部と滑車に巻き付けた中間部とを備えるロボットフィンガーユニットを採用する。
(もっと読む)
ロボットの電磁ブレーキ制御装置
【課題】多関節型ロボットのアーム等を駆動するサーボモータにおいて、そのサーボモータが有する非励磁作動型の電磁ブレーキの発熱を抑制することのできる電磁ブレーキ制御装置を提供する。
【解決手段】多関節型ロボットの各関節に駆動軸を駆動するモータ21〜26が設けられ、CPU30は、その各モータ21〜26が有する非励磁作動型の電磁ブレーキ21b〜26bによる駆動軸の制動を制御する。CPU30は、駆動軸の制動を解除する期間において、電磁ブレーキ21b〜26bの励磁コイル21c〜26cへの電圧印加を繰返しON及びOFFするON−OFF制御を実行しつつ、駆動軸の制動が解除された状態を維持する。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】把持装置100は、把持部110と、本体部120と、モータ部130とを備え、取り付けプレート121によってXYZステージ等に取り付けられる。把持部110は、把持対象物を把持(狭持)するための一対のフィンガー部を備え、本体部120の内部に収容された機構及びモータ部130の内部に収容されたモータによって駆動されて、その先端が開閉することで、把持対象物を把持(狭持)する。また、把持装置100では、XYZステージ等を制御して、作業用ベース上に載置された把持対象物に対して、把持装置100全体を下降させている際に、なんらかの理由で、把持部110の先端等が、把持対象物等に接触してしまった場合、把持部110が、本体部120に対して上方に移動することができるように構成されており、それによって、把持対象物等が破損等するのを防止することができる。
(もっと読む)
装置、および、制御方法
【課題】アームの位置決め精度を向上させることができる装置を提供する。
【解決手段】少なくとも2つの駆動装置を備え、一方の駆動装置は第1のアーム部を駆動させ、他方の駆動装置は第1のアーム部に設けられて第2のアーム部を駆動させる装置であって、駆動装置は、駆動出力軸を回転駆動する駆動部と、駆動部の駆動出力軸に、減速入力軸が接続されている減速機と、駆動部の駆動出力軸の回転角度位置を検出する第1の位置検出器と、減速機の減速出力軸の回転角度位置を検出する第2の位置検出器とを備え、駆動部と減速機と第1の位置検出器と第2の位置検出器とは、一体として構成されている。
(もっと読む)
ロボットハンド
【課題】把持部で把持した把持対象の回転精度を向上させることができるとともに、その回転量も大きくすることが可能なロボットハンドを得ること。
【解決手段】本発明のロボットハンド1は、把持対象を把持して回転させるロボットハンドであって、把持対象を挟み込んで把持すべく平行に開閉動作する一対の把持部11,12と、把持対象を把持した状態において、把持部同士の相対的な位置をずらすように、把持対象の回転軸Oと垂直な方向に少なくとも一方の把持部を移動させる移動手段と、を有する。
(もっと読む)
チャッキング装置
【課題】装置の上下寸法をコンパクトに抑えうる簡単な駆動力伝達機構を備えたチャッキング装置を提供する。
【解決手段】装置本体上に揺動可能に枢支され、四節リンク機構を構成する互いに平行な第一揺動レバー及び第二揺動レバーと、この四節リンク機構を構成し、両揺動レバーを揺動可能に連結する連結アームと、両揺動レバーを揺動駆動する送りネジ機構と、それぞれがチャック部材を備え、相互に接近離間することによりチャック部材同士が対象物を把持及び把持解除するように構成された第一及び第二の支持部材とを備えており、各揺動レバーにおける、四節リンクの対角の関節より外方の点においてそれぞれ対応する支持部材に連結されており、両揺動レバーが揺動することにより、支持部材同士が相互に接近離間するように構成されている。
(もっと読む)
ロボットの関節構造、ロボットフィンガー及びロボットハンド
【課題】リンク部の回転角度を大きくすることなく、大きな物体から小さな物体までを確実に把持することができるロボットの関節構造、その関節構造を備えたロボットフィンガー、及びそのロボットフィンガーを備えたロボットハンドを提供する。
【解決手段】相対的に移動可能に連結された第1リンク部1及び第2リンク部2と、第2リンク部2を第1リンク部1に対して回転させると共に第1リンク部1の長手方向(X方向)に沿って移動させる駆動手段4と、を備えることを特徴とする。
(もっと読む)
チャッキング装置
【課題】異なる形状のワークに対してワンタッチで対応可能なチャッキング装置を提供する。
【解決手段】装置本体上に配設された、第一及び第二のチャック部材を有する第一支持部材並びに第三及び第四のチャック部材を有する第二支持部材と、両支持部材をY軸方向に相互に接近離間させてワークを把持、解除するよう駆動する把持駆動部材と、各チャック部材を第一の位置と第二の位置とに揺動変位させる変位駆動部材とを有し、各チャック部材がワークを把持するフィンガーを有し、第一の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に離間し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に接近し、第二の位置では第一及び第三のフィンガーと第二及び第四のフィンガーとがX軸方向に接近し、第一及び第二のフィンガーと第三及び第四のフィンガーとがY軸方向に離間する。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
アーム機構およびそれを備えた真空ロボット
【課題】高剛性で耐熱性もある真空環境内に適した真空ロボットのアーム構成を提供すること。
【解決手段】内部に気密な空間を有するアームベース8と、アームベース8内に設置されたアーム駆動用モータ9と、アーム駆動用モータ9によって回転する中空の減速機シャフト31と、減速機シャフト31の回転が入力されて所定の比だけ減速し、減速機シャフト31の周囲で回転する第1減速機出力軸32と、からなり、アームベース8内に減速機シャフト31の下端が露出するよう設置された第1減速機10と、中空の減速機シャフト31の上端が侵入することでアームベース8の気密な空間と同圧となる気密な空間を有し、かつ第1減速機出力軸32に固定される第1アーム2と、第1アーム2の先端に設置され、入力軸が減速機シャフト31と接続された第2減速機15と、第2減速機15の出力軸に固定され、内部に気密な空間を有しない第2アームと、第1アーム2と第2アーム5とに追従するリンク機構と、を備えた。
(もっと読む)
一軸ロボット
【課題】スライダ30が特定の範囲で移動と停止を繰り返し、同じ位置に頻繁に停止することがあったとしても、当該停止位置で塵埃がこびりつく等の不具合を防止する。
【解決手段】略直方体形状の外殻を有する中空のケーシング11の上面に配置されたスライダ30と、前記ケーシング11に設けられ、且つ前記ケーシング11の上面に形成された開口部17を介して前記スライダ30を前記ケーシング11の長手方向に往復移動させる駆動機構と、前記ケーシング11の開口部17を遮蔽するように前記スライダ30を貫通する平板状のシャッタ40と、前記スライダ30の移動方向両側に設けられ、前記シャッタ40の上面と非接触状態で前記シャッタ40下面を吸引することにより、当該スライダ30の両側での前記シャッタ40の浮きを規制する一対の吸引手段34とを備えている。
(もっと読む)
スカラーロボット
【課題】上下軸の雰囲気と外環境とをジャバラにより隔離して当該雰囲気の外環境への流
出を抑制する上下軸を、ジャバラによる隔離を維持しつつ、より高速な上下動に対応させ
ることのできるスカラーロボットを提供する。
【解決手段】スカラーロボットには、支持軸14に回動可能に設けられた第2のアーム1
5に、第2のアーム15に貫通支持して第2のアーム15に対して少なくとも軸線方向に
移動させる上下回転軸16と、上下回転軸16を外環境と隔離させるジャバラ19,20
とが設けられている。上下回転軸16の下端部17と第2のアーム15の下部との間に設
けられる下側ジャバラ20内の雰囲気を、上下回転軸16の上昇に伴い下側ジャバラ20
が収縮するとき下側ジャバラ20の外環境に流出させずに第2のアーム15の内部に流入
させるように下側ジャバラ20内と第2のアーム15内とを連通させる連通路30を備え
る。
(もっと読む)
141 - 160 / 834
[ Back to top ]