
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
81 - 100 / 834
多段直動アクチュエータ及びロボットハンドの指機構
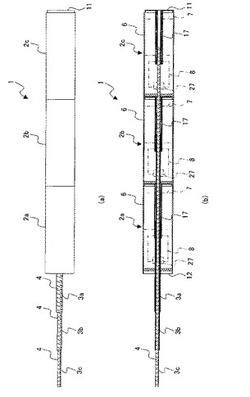
【課題】ロボットハンドの指機構の屈伸用駆動系の簡素化を可能とするようなアクチュエータの提供。
【解決手段】進退動を行う直動軸3(3a、3b、3c)を有した複数の直動モータ2(2a、2b、2c)を組み合わせて多段直動アクチュエータ1を形成する。それについて、直動モータそれぞれの直動軸を中空構造として軸腔を有するように形成し、そして隣接前段の直動モータの直動軸の軸腔に対し隣接後段の直動モータの直動軸が挿通するように、各直動モータを組み合わせることで、各直動モータそれぞれの直動軸が同一の軸芯上で個々に進退動をなせるようにしている。
(もっと読む)
駆動装置

【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第1ステータと、第2ロータと、第2ステータとを備える。第1ロータの回転軸を基準として、第1ロータおよび第2ロータは同心円状に配置され、第1ロータの回転軸を基準として、第1ステータおよび第2ステータは同心円状に配置されている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第2ロータと、ステータとを有する。第1ロータの回転軸を基準として、第1ロータおよび第2ロータおよびステータは同心円状に配置される。ステータは第1ロータと第2ロータとの間に配置されており、第1ロータと対向する第1コイルと、第2ロータと対向する第2コイルと、を有する。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
コンパクトな駆動ユニットを持つ広報用ロボット
【課題】人体模型を屈伸駆動させる駆動ユニットをコンパクトにして人体模型に内蔵し、人体模型の屈伸動作を滑らかに進行させることでより効果的な広報になるようにした広報用ロボットを提供する。
【解決手段】下体部と、前記下体部の上部に屈伸動作が可能に結合される上体部とを含む人体模型;及び駆動モーター、前記駆動モーターに回転可能に結合されるスクリューバー、前記スクリューバーに昇降可能に結合される昇降部材と、下部は人体模型の下体部に配置され、上部は人体模型の上体部に固定結合されて配置され、固定軸に回転可能に軸設されている回転ロッド、上端は前記回転ロッドの下端に軸設され、下端は前記昇降部材に軸設され、前記固定軸を軸として前記回転ロッドを一定範囲内で回転させる中継ロッドとを含む駆動ユニット;を含んでなる広報用ロボット。
(もっと読む)
万能結合構造を持つアクチュエータモジュール{ACTUATORMODULEHAVINGUNIVERSALARCHITECTURE}
【課題】より高い自由度と拡張性、互換性を揃えたロボットソリューションを提供することによって、使用者が自らロボットを変化させ、アップグレード出来る多関節ロボットに利用できるアクチュエータモジュールを提供する。
【解決手段】万能結合構造を持つアクチュエータモジュールに関するものである。アクチュエータモジュール自体に連結部材との結合のための固定片240を設置し、連結部材には固定片に対応する構造を持つ他の固定片を提供することで、通常のボルトとナットの結合手段を利用してより効果的な反復結合構造を形成できる万能結合構造を持つアクチュエータモジュールが開示される。
(もっと読む)
電動アクチュエーター
【課題】電動アクチュエーターの握力トルクを高めることを目的とする。
【解決手段】電動アクチュエーターであって、回転運動をする電動駆動部200と、前記電動駆動部に接続される直進運動機構であって、前記電動駆動部と接続される第1のネジ部230と、前記第1のネジ部と嵌合する第2のネジ部240を有し、前記第1のネジ部に加えられる回転運動を前記第2のネジ部の直線運動に変換する直進運動機構と、屈曲可能な屈曲機構(101〜104、111〜113)と、前記屈曲機構と前記第2のネジ部とを連結し、前記第2のネジ部の直線運動に基づいて前記屈曲機構を屈曲させる連結部材130と、を備える。
(もっと読む)
脚式移動ロボット
【課題】駆動制御性の良好な膝関節角を増加させることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上腿リンク32と下腿リンク34を連結する膝関節16とを有する脚体2を備える。膝関節16は、一端が下腿リンク34の軸40に対して回転自在に連結され、他端が上腿リンク32の軸42に回転自在に連結される連結ロッド44と、下腿リンク34の軸60と上腿リンク32の軸56との間の距離を、電動モータ40による駆動力により変化させる距離変動機構50とを備える。膝関節16の屈曲角が0度のとき、軸40と軸42との間の距離と軸60と軸56との間の距離との和が、軸40と軸56との間の距離よりも小さい。
(もっと読む)
ロボットハンド及びロボットシステム
【課題】互いに隣接する複数の指部を連動して動かすことができるとともに、複数の駆動部から得られる駆動力を1つの指部に集中させることができるロボットハンド及びロボットシステムを提供する。
【解決手段】ロボットハンド1に含まれる、中指部2−3に対応する屈筋腱部8aは、示指部2−2、中指部2−3、環指部2−4に接続されている。また、中指部2−3に対応する屈筋腱部8aは、示指部2−2、中指部2−3、環指部2−4を屈伸させる連動制御を行うサーボモータ3に接続されている。中指部2−3は、接続されているサーボモータ3が互いに異なる複数の屈筋腱部8aと接続されている。
(もっと読む)
ワイヤ駆動式ロボット
【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
移動機構及びこれを用いたピックアンドプレース装置
【課題】 構造が非常にシンプルなピックアンドプレース装置等を提供する。
【解決手段】 ピックアンドプレース装置Aは、タイミングプーリ30をX方向に移動さ
せる移動機構1と、タイミングプーリ30に連結され且つアーム52をZ方向に移動可能
な直進アームモジュール機構2とを備えている。移動機構1は、独立して駆動可能なステッピングモータ10a、10bと、タイミングベルト23a、23bが走行可能なように同モータ10a、10bに連結されたベルト・プーリ20a,20bと、タイミングベルト23a、23bとの間に配置され且つ各ベルトが交差するように掛け回されたタイミングプーリ30と、タイミングプーリ30を軸支するとともに直線上に移動自在に案内する軸ガイド部40とを有している。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
ロボットおよび成形装置
【課題】動作時にアームが通過するための広い空間を必要とすることがなく、かつアームを高速で移動させることが可能なロボットを提供する。
【解決手段】ロボット10は、基端側に固定されたベース部11と、ベース部11に設けられた駆動部12と、ベース部11に連結され、駆動部12からの動力により軸線方向(Z方向)に沿って伸縮自在な伸縮アーム20とを備えている。伸縮アーム20の先端には、軸線方向(Z方向)に平行なエンドエフェクタ取付面13を有するスライダ14が設けられている。伸縮アーム20は、互いに連動して軸線方向(Z方向)に沿って進退するとともに軸線方向に垂直な方向(X方向)に互いに積層された複数の移動体40、60、80からなっている。スライダ14は、移動体80に対して、軸線方向(Z方向)に沿って相対移動する。
(もっと読む)
走行ロボット
【課題】従来の走行ロボットは、各駆動輪や各関節部にモータや回転駆動手段を備えていたので、重量が増すと共に、制御も複雑になり易く、小型軽量化や走行性及び信頼性のさらなる向上が要望されていた。
【解決手段】車体Bの前部に、ロール軸回りに回動自在なサスペンションアーム1と、サスペンションアーム1の両端部に対してピッチ軸回りに回転駆動可能な左右の前部支持脚2を備えると共に、各前部支持脚に少なくとも一つの駆動輪Wfを夫々備え、車体Bの後部に、ピッチ軸回りに回転駆動可能な左右の後部支持脚3と、各後部支持脚3に対してピッチ軸回りに回動自在な旋回脚4を備えると共に、各旋回脚4の両端部に駆動輪Wrを夫々備えた走行ロボットRとした。モータ類を削減して小型軽量化や制御の簡素化を実現すると共に、常に全ての駆動輪を接地させることを可能にして、走行性能のさらなる向上を実現し、月や惑星での探査活動に非常に好適なものとなる。
(もっと読む)
リハビリを主な目的とした触力覚提示のための振動提示装置
【課題】非周期的な力覚提示とは独立して,手関節に正確な振動を提示することのできる振動力覚提示装置の提供,およびこの装置を用いた脳卒中片麻痺患者を主な対象とする上肢リハビリ支援装置の提供
【解決手段】
人間に対し,振動力覚を提示する装置であって,人間が操作する操作部(1)と,前期操作部の手関節からの位置および/または姿勢を検出する位置あるいは姿勢検出部(2)と,振動中心が手関節上にあるように配置され,操作部の振動自由度と同じ数よりなるアクチュエータからなる振動発生部(3)と,接続部(4)とを備えることを特徴とする装置であり,非周期的な力覚提示とは独立して,手関節に正確な振動を提供することができる.
(もっと読む)
ベルト式減速装置およびそれを用いた駆動装置
【課題】小型化を図りつつ、高い静粛性を発揮することができるベルト式減速装置を提供する。
【解決手段】回転駆動力を入力する入力プーリ12と、入力プーリ12より大径に形成され、入力プーリ12に入力された回転駆動力を減速して出力する出力プーリ14と、無端状に形成され、入力プーリ12から出力プーリ14に亘って架けられた一本の無端状ベルト17を備える。そして、入力プーリ12と出力プーリ14は、回転軸方向にずれて配置される。さらに、回転軸方向から見て、入力プーリ12の外形円と出力プーリ14の外形円とは、少なくとも一部において重なるように配置される。
(もっと読む)
搬送装置
【課題】シートの交換作業を容易に行うことができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、これらの上面を覆う防塵用の可撓性のシートとを有する。スライドユニット30は、スライドベース31と、その移動方向に沿って防塵用のシートを収容し、シートの方向を転換するためのローラからなる第1の方向転換部41と第2の方向転換部42とを有する。スライドベース31には、それぞれシートに向かって開口し第1の方向転換部材を支持する第1の支持部31cと、第2の方向転換部材を支持する第2の支持部32cが形成される。第1の方向転換部材41及び第2の方向転換部材42は、第1の支持部31cと第2の支持部32cに容易に着脱可能に嵌合する。これによって、スライドベース31上にワークや工具などが搭載されていても、シートの交換が容易である。
(もっと読む)
電動チャック
【課題】電動アクチュエーター或いはメカニカルチャックが故障した場合に部品交換が容易であり、汎用性が高く、メカニカルチャックにおけるフィンガーのワークに対する芯出し作業を手動で簡単に行える電動チャックの提供。
【解決手段】モータ9と、その回転出力軸に回転が止められて螺合した直動出力軸11とを備えた電動アクチュエーター3に、プッシャー22が押圧されることによりワーク把持用のフィンガー35が開かれ、プッシャー22が押圧されていない時はバネの力でフィンガー35が閉じるメカニカルチャック4を着脱可能に取り付けてある。回転出力軸に直動出力軸11を軸方向に調整できるハンドル19を固定する。ハンドル19は放熱部材を兼ねたアルミ合金製とすることがある。
(もっと読む)
リンク機構
【課題】揺動部と非揺動部との間のクリアランスを大きくすることなく、従来よりも揺動部の可動角を更に大きくする。
【解決手段】リンク機構1はベース部材2と出力部材3とを備える。ベース部材2には、前側に第1リンク部材4が、後側に第2リンク部材5が夫々揺動自在に連結されている。出力部材3には、前側に第3リンク部材6が、後側に第4リンク部材7が夫々揺動自在に連結されている。第3リンク部材6の揺動端部は第1接続軸J5上で、第4リンク部材7の後側の揺動端部は第2接続軸J6上で、夫々第1リンク部材4に揺動自在に連結されている。第2リンク部材5の揺動端部は、第3接続軸J7上で第4リンク部材7に揺動自在に連結されている。
(もっと読む)
81 - 100 / 834
[ Back to top ]