
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
61 - 80 / 834
医療用マニピュレータ
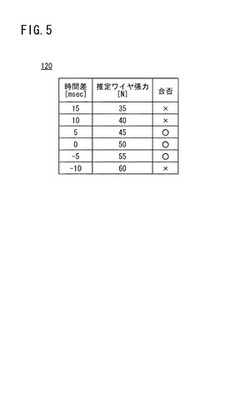
【課題】駆動源から先端動作部に駆動力を伝達する動力伝達経路上に設けられた可撓性を有する動力伝達部材の異常の有無を判断できる医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10において、モータ50a、50bの駆動力はワイヤ80a、80bを介して先端動作部12に伝達される。モータ50a、50bは、コントローラにより駆動制御される。コントローラ29は、始業前点検として、規定信号に従ってモータ50a、50bを動作させ、エンコーダ51a、51bからの信号に基づいてモータ50a、50bの動作角度を監視し、モータ50a、50bが目標角度に達するのに要する動作時間に基づいて、ワイヤ80a、80bの異常の有無を判断する。
(もっと読む)
ハンド及びロボット

【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
ロボットアーム装置
【課題】アームの旋回位置によってアーム先端部における重力方向の変位差が生じ得るという不具合や、昇降部の上昇時に基台本体部の内部空間の埃等が舞い上がって基台の外部に放出され得るという不具合を抑制・防止可能なロボットアーム装置を提供する。
【解決手段】起立壁33に正対した場合に、シータ軸J及び昇降軸(ネジ軸61)の各軸心Jc,61cを、起立壁33の幅方向中央部33cと一致させ、且つ、昇降部4を最下降させた状態で基台本体部3の内部空間で起立壁33の高さ方向中間点33hより下方に存在する部品、すなわち昇降駆動用モータ7、リニアガイド部8(ガイドレール81)、可動部62(可動部62を構成するナット体621、ナット保持体622、被ガイド体623)、排気口9に付帯させたファンを、起立壁33の幅方向中央部33cを中心に左右対称となるように配置した。
(もっと読む)
関節構造、及びその関節構造を備えたロボット
【課題】第1の部材に対する第2の部材の相対的な角度に応じて、伝動ベルトのテンションが増減する技術を提供する。
【解決手段】第1実施形態に係る関節構造Jは、関節軸Cを有する体幹部2と、体幹部2の関節軸C回りに回転可能となるように体幹部2によって支持される上腕部5と、体幹部2に回転可能に設けられ、肩関節駆動モータ34(駆動源)によって回転駆動される駆動プーリ11と、上腕部5に回転不能に設けられる従動プーリ12と、駆動プーリ11と従動プーリ12の間に掛けられる平ベルト13(伝動ベルト)と、を備えている。従動プーリ12の外周12aは略円形である。従動プーリ12の中心軸Dは、関節軸Cからずれている。
(もっと読む)
産業機器の回転関節制御装置
【課題】減速機を使用して回転負荷にトルクを供給するトルク制御において、駆動状態あるいは制動状態といったトルクの供給状態を検知する。
【解決手段】本発明は、回転負荷83に対して回転動力を供給する回転関節装置が発生させるトルクを制御する回転関節制御装置71を提供する。回転関節装置は、駆動トルクを発生する駆動トルク発生部51と、所定の回転比で変速された回転数の回転動力を所定の効率で出力する出力軸を有する変速装置30と、出力側トルクを伝達するトルク伝達構造とを有する。回転関節制御装置71は、変速装置30が出力軸に回転動力を出力している伝達状態である駆動状態と、変速装置30が入力軸に回転動力を出力している伝達状態である制動状態とを判定する伝達状態判定部71aを備える。伝達状態判定部71は、駆動トルクと回転比の積である無損失トルクと、出力側トルクとの比較に基づいて駆動状態と制動状態と判別する。
(もっと読む)
トルク検出装置およびロボット装置
【課題】無限回転する回転体の回転トルクを適正に検出することができるトルク検出装置を提供する。
【解決手段】トルク検出装置は、ベース部20と、駆動部30と、検出部40とを具備する。駆動部30は、第1の軸Lx方向に主軸を有する回転子31と、回転子31を上記主軸の周りに回転させる固定子32とを有する。検出部40は、起歪体41と、検出素子42とを有する。起歪体41は、ベース部20に固定される第1の端部と回転子31に固定される第2の端部とを有し、回転子31と同心的に配置される。検出素子42は、起歪体41に取り付けられ、ベース部20に対する起歪体41の、回転子31の駆動反力に起因する上記軸Lx周りへの歪みを検出する。
(もっと読む)
外骨格型ロボット
【課題】従来の外骨格型ロボットにおいては、体幹・下肢部の運動支援を適切に行えない。また、電動モータや油圧アクチュエータを用いる事例があるが、大きな負荷を発生するものは装置の自重が大きい。また、負荷を支えるだけの場面においてもアクチュエータがエネルギーを消費するために、エネルギー効率が悪い。
【解決手段】ベースと下半身とを有する外骨格型ロボットであって、左右の足首、左右の膝、および腰の左右の各位置に配置されている能動の関節である能動関節と、能動関節を動作させる制御部とを具備し、能動関節は、エアマッスルと電動モータとを具備する外骨格型ロボットにより、上記の課題が解決できる。
(もっと読む)
ワーク搬送装置
【課題】設置に広いスペースを必要としないコンパクトな装置であるとともに、効率的なワークの搬入搬出動作ができるワーク搬送装置を提供すること。
【解決手段】支持フレーム2と、第1軸J1まわりに回動自在に支持される第1アーム3と、第1軸J1上に配置され支持フレーム2に対して相対的に姿勢を保持可能な基準姿勢保持部材と、第1アーム3に対して第1軸J1と平行な第2軸J2まわりに回動自在に支持される第2アーム5と、第1軸J1と平行であって第2軸からの距離が略等距離である第3軸J3及び第4軸J4上にそれぞれ配置され、第2アーム5に対して第3軸J3及び第4軸J4まわりにそれぞれ回動自在に支持される第1及び第2ハンド51、52と、を備え、第1アーム3又は第2アーム5が回動した場合であっても、支持フレーム2に対する第1及び第2ハンド51、52の姿勢が保持されることを特徴とするワーク搬送装置。
(もっと読む)
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
ロボット、ロボットの駆動方法
【課題】回生エネルギーの発生を抑制してロボットの全体としての生産性を向上させる。
【解決手段】ロボットの可動部を目標位置に向けて加速し、目標位置の手前で制動力を作
用させて可動部を減速させることで目標位置に停止させる。更に、可動部に制動力を作用
させるに先立って、停止時の制動力よりは小さな制動力を作用させることにより、可動部
を緩慢に減速させる予備減速を行う。こうすれば、可動部の移動速度が低下した状態から
停止させることができるので、停止時に発生する回生エネルギーを抑制することができる
。その結果、ロボット全体としてのエネルギー効率が改善されるので生産性を向上させる
ことが可能となる。
(もっと読む)
搬送ロボット
【課題】ワークを搬送するときの位置決め精度を確保することができると共に、ワーク運搬用箱を搬送する際にエンドエフェクタに対して作用するモーメント荷重をほとんどなくすことができ、エンドエフェクタに必要とされる許容モーメントを小さくすることができる搬送ロボットを提供すること。
【解決手段】搬送ロボット1は、把持部5によってワークを把持するときには、ロック機構部6によってバランスハンド部4を原位置に固定してエンドエフェクタ21を移動させるよう構成してある。搬送ロボット1は、把持部5によってワーク運搬用箱8Bを把持するときには、ロック機構部6によってバランスハンド部4の原位置への固定を解除することにより、バランスハンド部4、把持部5及びワーク運搬用箱8Bを合わせた重心Gが揺動軸42の下方に位置するようバランスハンド部4が揺動した状態で、エンドエフェクタ21を移動させるよう構成してある。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
駆動源ユニット、及びロボット
【課題】ブレーキとモーターとを配置するために必要な体積を抑制して、モーター及びブレーキを収容するために必要なアームの大きさが増大することを抑制することができる駆動源ユニット、及びロボットを提供する。
【解決手段】中心軸まわりに回動する出力軸を備える駆動源と、出力軸に係合しており、出力軸と略一体に、中心軸まわりに回動する出力部材と、出力軸の軸方向において駆動源と並べて配設されており、出力軸の回動を制動することが可能な制動手段と、を備え、出力部材と制動手段とは、出力軸の軸方向において、少なくとも一部分が、同じ位置に配設されている。
(もっと読む)
ダブルアーム型ロボット
【課題】独立して2組の多関節アームの高さを変化可能なダブルアーム型ロボットを提供する。
【解決手段】第1及び第2の多関節アーム12、第1の多関節アーム11の一端が回動可能に連結される第1のアーム支持部16と、第2の多関節アーム12の一端が回動可能に連結される第2のアーム支持部17と、第1及び第2のアーム支持部17の第1及び第2の多関節アーム12と反対側の一端を鉛直方向に移動可能に保持しており、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12をそれぞれ回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12のハンド部23,33をそれぞれ回動させる第1及び第2の関節回動部と、第1及び第2のアーム支持部16,17を基柱14に対してそれぞれ独立して移動させる第1及び第2の上下駆動部とを備える。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 内軸用のマグネットと外軸用のマグネットとを一体とすることで、低コストのアクチュエータを提供すること。
【解決手段】 アクチュエータは、中空構造を有し、中空構造の内側を真空排気可能に構成され、中空構造の外周側で第1コイル部を保持するハウジングと、ハウジングの内部において回転自在に支持され、外周に第2コイル部を有する内軸と、内軸の回転軸と同軸にハウジングの内部において回転自在に支持されており、内軸の外周側を囲むように配置されている円筒状の外軸と、外軸の外周側で第1コイル部に対向し、外軸の内周側で第2コイル部に対向する磁石と、内軸とハウジングの一方に設けられた整流子と、内軸とハウジングの他方に設けられ、内軸が少なくとも回転する際には整流子と摺接するブラシと、を備え、第2コイル部は、整流子とブラシを介して給電される。
(もっと読む)
産業用ロボット
【課題】アームを支持する支持部材を上下方向へ移動可能に支持する柱状部材を備えている場合であっても、比較的簡易な構成で、搬入される搬送対象物の位置ずれを抑制しつつその傾きを適切に補正することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向へ移動可能に支持する柱状部材7と、基台8と、柱状部材7の下端を支持するとともに基台8に対して回動可能な旋回部材9と、基台8に対して柱状部材7を上下方向に直交する所定方向へ相対移動させる移動機構10とを備えている。
(もっと読む)
駆動装置
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
61 - 80 / 834
[ Back to top ]