
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
161 - 180 / 834
ロボットおよびその制御装置
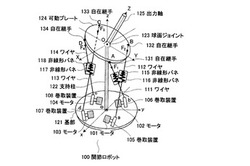
【課題】 関節の姿勢角度と剛性を独立に制御し、良好な安全性と優れた制御性能を共に達成することができる関節ロボットおよびその制御装置を提供することを目的とする。
【解決手段】 基部と、基部に設置された4つのモータと、4つのモータに各々取り付けられた4つの巻取装置と、基部の表面に軸中心線が垂直するように設置された支持柱と、支持柱の上端に取り付けられた球面ジョイントと、球面ジョイントに取り付けられた可動プレートと、可動プレートの底部に設置された4つの自在継手と、4つの前記巻取装置と4つの前記自在継手とを一対一に連結する非線形バネが組み込まれた4本のワイヤと、可動プレートの上面に軸中心線が垂直するように固定された出力軸とを備えた。
(もっと読む)
人型歩行ロボット用脚

【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
アーム装置及びその電力供給方法
【課題】低コストで機構設計が容易なアーム装置及びその電力供給方法を提供すること。
【解決手段】本発明にかかるアーム装置1は、アーム10と、スーパーキャパシタ40とを備える。アーム10は、少なくとも1つの関節11と、関節11と回動可能に連結されたアームユニット12と、電源30からの電力供給により前記関節を駆動する駆動手段と、を有し、本体70に回動可能に連結されている。スーパーキャパシタ40は、アーム10に設けられ、本体70に設けられた電源30に第1の送電線60aを介して接続されている。また、スーパーキャパシタ40は、第1の送電線60aよりも太い第2の送電線60bを介して、アーム10の駆動手段に接続されている。
(もっと読む)
パラレルリンクロボット
【課題】動作可能領域及び加減速性能を小さくすることなしに、自由度を高める。
【解決手段】パラレルリンクロボット10は、基礎部11と、可動部12と、基礎部と可動部とを連結していて基礎部に対してそれぞれ1自由度を有する三つのリンク部20a〜20cと、リンク部のそれぞれを駆動する三つのアクチュエータ13a〜13cとを具備し、リンク部のそれぞれは、基礎部に連結された駆動リンク21a〜21cと、駆動リンクと可動部とを連結していて互いに平行な二つの受動リンク22a〜22c、23a〜22cとからなっており、さらに、可動部に付属する要素19の姿勢を変更する姿勢変更機構部15、少なくとも一つのリンク部の二つの受動リンクの間においてこれら受動リンクに対して平行に配置された追加アクチュエータ13dなどと、追加アクチュエータから同軸に延びていて回転駆動力を姿勢変更機構部に伝達する動力伝達軸部39とを含む。
(もっと読む)
コンロッドのクランプ装置
【課題】コンロッドを加工装置で機械加工する際に、様々な車種に対応するために形状や大きさの異なるコンロッドであっても簡易な構成でクランプすることができる、コンロッドのクランプ装置を提供する。
【解決手段】本実施形態に係るクランプ装置10は、取付け部20に固定された状態で前方に延出する棒状の支持部31と、該支持部31に連結された状態で同じく前方に延出する棒状の可動部51とを備え、支持部31及び可動部51に、位置決め機構、大端部クランプ機構、小端部クランプ機構、第一の駆動機構等の各機構が配設される。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
ロボット指アセンブリ
【課題】ロボット指アセンブリを提供すること。
【解決手段】ロボット手が、第1、第2、および第3の指骨を有する指を備える。第1の関節が、ベース構造体に対して第1の指骨を回転自在に連結する。第2の関節が、第2の指骨に対して第1の指骨を回転自在に連結する。第3の関節が、第2の指骨に対して第3の指骨を回転自在に連結する。第2の関節および第3の関節は、第2の指骨に対する第3の指骨の位置が第1の指骨に対する第2の指骨の位置によって決定されるように、運動学的にリンクされる。
(もっと読む)
腱駆動型指作動システム
【課題】腱駆動型指作動システムを提供すること。
【解決手段】人間型ロボットが、少なくとも1つの指を有するロボット手を備える。ロボット指のための作動システムが、ロボットにより支持され、指から離間された、アクチュエータアセンブリを備える。腱が、アクチュエータアセンブリから少なくとも1つの指まで延在し、腱ターミネータにて終端する。アクチュエータアセンブリは、腱ターミネータを、したがって指を動かすために、腱を作動させるように作動可能である。
(もっと読む)
ロータリ直列型弾性アクチュエータ
【課題】器用な人間型ロボット用の上腕アセンブリを作動させるためのロータリアクチュエータアセンブリを提供すること。
【解決手段】人間型ロボットのための上腕アセンブリは、それぞれが軸を画定する複数の腕サポートフレームを備える。複数のロータリアクチュエータアセンブリがそれぞれ、各軸を中心として複数の腕サポートフレームの中の1つに設置される。各ロータリアクチュエータアセンブリは、各軸を中心として設置されたモータと、モータに回転可能に連結されたギアドライブと、ねじりばねとを備える。ねじりばねは、ギアドライブの出力部に回転可能に連結されたばね入力部と、関節のための出力部に連結されたばね出力部とを有する。
(もっと読む)
省エネルギー型ロボット関節駆動制御システム
【課題】本発明は、ロボットの準受動制御において、能動期と受動期の切り替えを遅延なく確実に実現することのできるロボット関節駆動制御システムを提供することを目的とする。
【解決手段】準受動制御の受動期において、出力軸にかかる回転アクチュエータの減速機に起因する摩擦トルクを相殺するような回転トルクを、駆動モータによって付与する。この際、駆動モータの回転トルクは、ロボット関節の出力軸に設けられたトルクセンサの測定値を入力としてフィードバック制御により導出する。その結果、出力側リンクは、減速機の存在にもかかわらず、あたかも自由関節に接続されているかのように挙動し、エネルギー効率の高いロボット関節駆動制御システムを実現する。
(もっと読む)
ローダ装置及び部品の搬送方法
【課題】可搬重量の低下及び動作スピードの低下を抑制しつつ小型化することができるローダ装置を提供する。
【解決手段】第1の方向に沿って延びる動力伝達軸4には、外周面に螺旋状の螺子溝及び第1の方向に沿って延びるスプライン溝が形成されている。動力伝達軸4に螺合されたボールねじナット7は、第1駆動モータ31から伝達された回転運動をねじ作用により動力伝達軸4の第1の方向の直線運動に変換する。動力伝達軸4に装着されたボールスプラインナット8は、第2駆動モータ41から伝達された回転運動を動力伝達軸4に伝達して動力伝達軸4を該動力伝達軸4の中心軸線L2回りに回転させる。チャック66が連結された動力伝達ベルト64は、第1の方向に沿って動力伝達軸4と一体移動可能であるとともに、動力伝達軸4から伝達された動力伝達軸4の中心軸線L2回りの回転運動を第2の方向の直線運動に変換してチャック66に伝達する。
(もっと読む)
ベルトの駆動装置及びそれを備えたロボット
【課題】ベルト駆動装置やロボットの動作性能の低下を防止するとともに、ロボットのメンテナンス時期を通知することを課題とする。
【解決手段】ベースに対して回転可能な駆動プーリ7と従動プーリ8との間に掛けられて一定の張力が維持されるベルト6と、駆動プーリ7を回転させるサーボモータ11と、サーボモータ11を制御するコントローラ15と、張力を測定可能なロードセル10と、を少なくとも備えたベルト駆動装置において、コントローラ15が、ロードセル10の測定結果からベルト6の固有振動数を算出する自動設定部155を備え、測定結果が問題の無い張力であったとき、サーボモータ11を駆動するモータ駆動部152のノッチフィルタのカットオフ周波数として固有振動数を設定する。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長形状のガイド部の先端に設けられた把持具の姿勢を遠隔操作で変更することができ、その遠隔操作機構は比較的簡単な構成であり、かつガイド部の形状を問わない遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、先端部材2に設けられた開閉式の把持具1と、先端部材2に回転自在に設けられた回転部材13と、回転部材13の回転動作を把持具1の開閉動作に変換する回転・開閉変換機構14とを備える。ガイド部3は、回転部材13に回転を伝達する回転軸22と、両端に貫通したガイド孔30aとを内部に有する。先端が先端部材2に接して進退動作することにより先端部材2を姿勢変更させる姿勢操作部材31をガイド孔30a内に進退自在に挿通する。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
減速機の取付け構造、及び減速機の製造方法
【課題】減速機を被取付け体に取付ける構造において、減速機駆動時の振動を抑制することのできる減速機の取付け構造を提供する。また、減速機駆動時の振動を抑制することのできる減速機の製造方法を提供する。
【解決手段】サーキュラスプライン33においてモータ21側の端面から突出するスタッドボルト35が、モータプレート23においてスタッドボルト35を挿通させるために形成された貫通孔23bに挿通される。スタッドボルト35の先端部にナット36が締着されることにより、サーキュラスプライン33がモータプレート23に固定される。スタッドボルト35の圧入部が、サーキュラスプライン33のモータ21側の端面に設けられたボルト固定穴に圧入されている。
(もっと読む)
流体圧伝達装置及びロボットハンド装置
【課題】小型化及び軽量化を図ることができる流体圧伝達装置、及びこれを備えたロボットハンド装置を提供する。
【解決手段】流体圧伝達装置は、複数の主駆動流体圧シリンダ371,372と、主駆動流体圧シリンダ371,372のシリンダ室3711,3712と流体圧伝達路381,382を介してシリンダ室23a,24aが連通される複数の従動流体圧シリンダ23,24と、ピストン412で2つのシリンダ室41a,41bに区切られた副駆動流体圧シリンダ41とを備え、主駆動流体圧シリンダ371,372が発生した流体圧を従動流体圧シリンダ23,24に伝達する。ピストン3711,3712は主モータ40により、ピストン412は副モータ43により、夫々駆動される。流体圧伝達管381,382と副駆動流体圧シリンダの各シリンダ室41a,41bとは連通管421,422に介して連通する。
(もっと読む)
流体圧アクチュエータ
【課題】第1の流体圧シリンダにおいて流体圧を効率良く発生させることができてコンパクトな流体圧アクチュエータを提供する。
【解決手段】
第1の流体圧シリンダ37からの流体圧を第2の流体圧シリンダ23に付与して第2の流体圧シリンダから駆動力を出力する。第1の流体圧シリンダ37は、第1のシリンダ本体371と、中空の第1のピストン372と、進退する第1のピストンに接して第1のシリンダ本体を閉塞するシール部材47とを備える。第1のピストンに沿ってボールねじ38を挿入する。ボールねじを回転駆動手段40により回転させ、第1のピストンに固設されたナット39を介して第1のピストンを進退させる。第2の流体圧シリンダは、第1の流体圧シリンダからの作動用流体が第2のシリンダ本体231に供給され、第2のピストンの往復動によりピストンロッド233の進退動作を駆動力として出力する。
(もっと読む)
多指ハンド装置
【課題】拇指機構、示指機構及び中指機構を用いて物体の安定した把持状態を実現することができる多指ハンド装置を提供する。
【解決手段】屈伸機能を有する示指機構6、中指機構7、及び拇指機構5を備える多指ハンド装置1において、拇指機構5の2軸で回動する手根中手関節19,20のうちの第2の回動軸20を、その軸線aが示指機構6の中手指節関節15,16と中指機構7の中手指節関節15,16との間を通って延びるように配設する。
(もっと読む)
基板吸着装置
【課題】Wet処理装置(洗浄装置あるいは現像装置等液体を用いるプロセス処理機)内の基板搬送にも適用可能で、配管系の不要なコンパクトな基板吸着装置の提供を目的とした。
【解決手段】少なくとも、基板を気密に吸着するためのラッパ状の吸着口を備えるゴムパッド8と、前記ゴムパッドの基部を膜保持ハウジング30を介して気密に被覆するダイアフラム膜7と、前記ダイアフラム膜7を変形させるための圧力制御ブロック3と、を有することを特徴とする基板吸着装置である。
(もっと読む)
3自由度を有する姿勢変更機構を備えたパラレルリンクロボット
【課題】姿勢変更軸の自由度を増加したパラレルリンクロボットを提供すること。
【解決手段】基礎部材12と可動部材100の間を駆動リンク30と受動リンク32からなる3組のリンク機構26を並列に関節接続すると共に、可動部材100にエンドエフェクタの姿勢を制御するための3自由度を有する姿勢変更機構部102を備えたパラレルリンクロボットPRにおいて、可動部材100に、可動部材100と3つの受動リンク32を接続する各関節部36の回転軸線を含む平面に対して垂直な第4軸線回りに回転可能に接続された第1回転部材と、前記第1回転部材に、前記第4軸線に直交する第5軸線回りに回転可能に接続された第2回転部材と、前記第2回転部材に、前記第5軸線に直交する第6軸線回りに回転可能に接続されることを特徴とするパラレルリンクロボット。
(もっと読む)
161 - 180 / 834
[ Back to top ]