
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
41 - 60 / 834
二足歩行ロボットの股関節構造
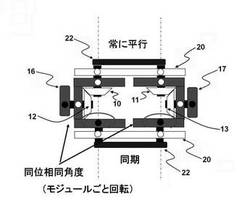
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
直交型組付装置

【課題】大型化を招くことなく、ワークを移動させることのできる範囲を拡大可能な直交型組付装置を提供する。
【解決手段】レールとレールに沿って移動する移動部材からなるX軸、Y軸、Z軸ローダによって、ワークWを把持するワーク把持部16を移動させる。さらに、ワーク把持部16をワークWに接触して把持するマニュピレータ部16aと、このマニュピレータ部16aをX軸、Y軸、Z軸のうち少なくとも一つの軸方向へ移動させるマニュピレータ稼働部16bによって構成する。これにより、X軸、Y軸、Z軸ローダによってワークWを移動させることのできる範囲に加えて、マニュピレータ稼動部16bによる移動範囲を拡大できる。
(もっと読む)
伸縮アクチュエータ
【課題】軸を曲げた状態で回転運動を軸方向の運動に変換することが可能な、サービスロボットの駆動源として適宜な伸縮アクチュエータを提供する。
【解決手段】回転駆動手段と、該回転駆動手段に駆動されて軸方向の長さが変わる回転・軸長変換手段と、該回転・軸長変換手段を中に収め前記回転駆動手段の筐体に接合されて回転に伴う前記回転・軸長変換手段の全体形状の変形を規制する規制手段と、を備え、前記回転・軸長変換手段が、2つの部材から構成され、少なくとも一つが螺旋形状を有し回転により二つの部材の係合位置が変わって伸縮し、前記螺旋形状の他の部材を受け入れて係合する軸方向に繰り返し現れる部分の軸方向の寸法が、該部分に嵌りこんで係合する他の部材の形状の軸方向の寸法に、前記回転・軸長変換手段が曲げられたときに前記2つの部材が相互移動可能なようにさらに軸方向の隙間を加えたものにされる。
(もっと読む)
ロボット
【課題】外部の物体への衝撃の緩和に起因するロボットの作業量の低下を抑制することが可能なロボットを提供する。
【解決手段】このロボット100は、第1アーム部13と、第1アーム部13に対して折れ曲がり可能に接続されている第2アーム部14とを含むアーム12と、第1アーム部13側に設けられ、第1アーム部13および第2アーム部14を含むアーム12を駆動するモータ11とを備える。そして、通常時には、第2アーム部14が第1アーム部13に対して折れ曲がらずに、アーム12が駆動されるとともに、外部の物体200と衝突した時には、第2アーム部14が第1アーム部13に対して折れ曲がり、第2アーム部14がアーム12の移動方向と逆方向に移動することにより、外部の物体200への衝撃を緩和するように構成されている。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
コアレスモーター、ロボットハンドおよびロボット
【課題】同一方向の回転であれば電流の流れる方向を切り替える必要が無く、よって簡単な構造でブラシレスとし、且つコアレスレスモーターを提供する。
【解決手段】回転軸と、前記回転軸に固定され、前記回転軸の軸方向にN極とS極とを配置し、前記回転軸の回転中心を中心として円柱状に形成された永久磁石を備える磁石体と、前記磁石体の前記永久磁石の前記N極面、もしくは前記S極面に対向配置される第1の面を有し、前記磁石体の前記回転中心において前記磁石体と相対的に回転可能に配置される半導体装置と、を備え、前記半導体装置は、前記第1の面に前記回転中心から放射状に配置される1以上の導体配線と、前記半導体装置は、少なくとも前記導体配線に流す電流の方向を切り替える回路を含む駆動回路と、前記磁石体と前記半導体装置との相対的な回転位置を検出する検出回路と、を含むコアレスモーター。
(もっと読む)
関節駆動機構
【課題】低剛性から高剛性まで幅広く関節剛性を調整する。
【解決手段】ベース部材6に対してリンク部5が揺動軸心La回りに揺動可能に連結されている。ベース部材6には駆動プーリ2Aが設けられている。リンク部5には一対の従動プーリ81,82が設けられている。紐状弾性部材1は、その中央部1aが駆動プーリ2Aに架けられ、各端部1b,1cが各従動プーリ81,82に架けられている。紐状弾性部材1の両端部1b,1cは、調整機構31の剛性調整用駆動プーリ2Bに巻き取られて駆動プーリ2A側に引っ張られ、剛性調整用駆動プーリ2Bを回転駆動することで、紐状弾性部材1の駆動プーリ2Aと各従動プーリ81,82との間の有効長さが調整される。
(もっと読む)
モーター、ロボットハンド及びロボット
【課題】位置センサー及び制御回路を備え、信頼性が高く小型のブラシレスモーターを提供する。
【解決手段】モーターは、円柱状であり、円周方向にS極及びN極を交互に有する回転子と、回転子の円形面に接続された回転軸と、円形面に対向する第1の面を有し、第1の面に円周方向に沿って配列された複数の渦巻状導体パターンを有する半導体素子と、を備え、前記半導体素子は、前記渦巻状導体パターン内に位置するコアと、前記渦巻状導体パターンに流れる電流を制御する制御回路と、前記回転子の磁極の位置を検出する位置センサーと、を含む。
(もっと読む)
ロボット
【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
把持装置及びロボット装置
【課題】一対のフィンガーの把持動作に用いられる回転駆動源を、一対のフィンガーの回転駆動に兼用する。
【解決手段】モータ5は、フレーム6から回転軸5bが突出するようにフレーム6に収容されている。回転軸5bには、ピニオン7が固定されている。また、フレーム6に対してグリッパ基台12が回転可能に設けられている。一対のラック10,10が、グリッパ基台12に支持されて、ピニオン7を間に挟んでピニオン7に噛み合っている。一対のラック10,10には、フィンガー4,4が固定されている。フレーム6には、グリッパ基台12の回転を規制するロック機構14が設けられている。ロック機構14は、一対のラック10,10の移動が規制されると、グリッパ基台12への係止が解除され、グリッパ基台12の回転が許容される。
(もっと読む)
ハンド、ロボット及びロボットシステム
【課題】把持したボルトをシームレスにタップ穴に挿入することが可能なハンド、ロボット及びロボットシステムを提供する。
【解決手段】ハンド20は、第1のフレーム25aに設けられ、ボルトBを把持する1対の把持爪21a、21bを揺動軸AXp回りに揺動させる揺動機構29と、第1のフレーム25aに設けられ、各把持爪21a、21bを内側に支持する1対の支持部22a、22bを揺動軸AXpに沿って開閉させる開閉機構28と、把持爪21a、21bが把持したボルトBの軸回りに、第1のフレーム25aを第2のフレーム25bに対して無限回転させるボルト回転機構30と、動作する機構を1)揺動機構28及び開閉機構29又は2)ボルト回転機構30に切り替える切り替え機構32とを備える。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
ハンド及びロボット
【課題】部品を把持するための腕(アーム)の姿勢変化を小さくすることが可能なハンド及びロボットを提供する。
【解決手段】ハンド35aは、1対の支持部42と、1対の支持部42の内側にそれぞれ支持され、部品を把持する1対の把持爪36と、1対の支持部42を各支持部42の長手方向と交差する揺動軸AXpに沿って開閉させる開閉機構400と、1対の把持爪36を揺動軸AXp回りに揺動させ、把持爪36の先端の向きを変更させる揺動機構500とを備える。
(もっと読む)
多指ハンドユニットおよびロボット
【課題】骨格フレームの曲げ剛性およびリンク部の収納スペースを維持しながらリンク部の小型化を図ることが可能な多指ハンドユニットを提供する。
【解決手段】この多指ハンドユニット1は、複数の指部10、20および30を備え、少なくとも指部10は、内部に収納部141dが配置される中空の骨格フレーム141を有する根元リンク部14と、根元リンク部14を回動させる関節駆動部11とを含む。
(もっと読む)
移動ロボット用肢体駆動機構、およびこの肢体駆動機構を用いた移動ロボット
【課題】複雑な制御が不要でありながらも安定した動作が可能であり、また、低コストで製造可能であり、さらに、ロバスト性に優れた移動ロボットと、この移動ロボットに対して適用可能な移動ロボット用肢体駆動機構とを提供する。
【解決手段】移動ロボット用肢体駆動機構20は、複数のサーボモータ24a,24b,24c,24dとリンク機構とを備え、長手方向に伸びる肢体本体部24を回転駆動させるための機構であって、肢体本体部24は移動ロボット10に回転自在な状態で取り付けられ、複数のサーボモータ24a,24b,24c,24dはそれぞれ、互いに平行に配置される出力軸23a,23b,23c,23dを備え、複数のサーボモータの出力軸のうち少なくとも1つはリンク機構に接続して、当該リンク機構を介してサーボモータの出力で肢体本体部24を回転駆動する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】定常的に大きな負荷が作用した場合にも効率を損なわず、柔軟な動作と周囲に対する安全を確保できるアクチュエータ装置を提供する。
【解決手段】ロボット装置やパワーアシスト装置の関節駆動に用いられるアクチュエータ機構において、選択的に駆動制御されるモータ11と、バネ要素20と、モータ駆動によりバネ要素の発生力および/またはその向きを変化させる変更機構と、バネ要素に接続された出力端22とを設けて構成する。一実施例の変更機構は、モータ駆動によって傾斜量が変化する傾斜レール16を具えるとともに、バネ要素は傾斜レールの傾斜方向へその角度に応じた力を発生し、これにより出力端が前記傾斜レールの角度に応じた力でその傾斜方向に付勢される。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
41 - 60 / 834
[ Back to top ]