
Fターム[3C007HS27]の内容
マニピュレータ、ロボット (46,145) | 駆動源 (1,598) | 電気式 (1,016) | 電動機 (855)
Fターム[3C007HS27]の下位に属するFターム
DDモータ (21)
Fターム[3C007HS27]に分類される特許
21 - 40 / 834
ワーク搬送装置
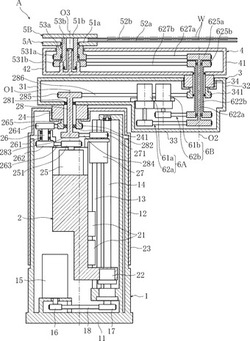
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
モーター、ロボットハンドおよびロボット

【課題】モーターの用途に最適なモーター出力(トルク)とトルクリップルのバランスを容易に調整することができるモーターを提供する。
【解決手段】円柱形状の回転体と、回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体の外周に対向配置される円筒形状のステーターと、を備え、前記回転体は円周方向にN極とS極とが交互に配置される磁石を有し、前記ステーターは空芯巻線を複数有し、前記空芯巻線は、前記回転体の回転方向に直交する第1配線、および第2配線と、前記回転体の回転方向に延伸する第3配線、および第4配線と、前記第1、第2、第3および第4配線の各配線端部を繋ぎ、8角形形状の斜辺を形成する4つの第5配線と、を有し、前記空芯巻線が、前記磁石の磁極の幅に相当する幅をa、相数をm(m:3以上の整数)とした場合に、前記空芯巻線の中心間の間隔がa/mで配置されるモーター。
(もっと読む)
ロボット制御装置及びロボット制御方法
【課題】主電源が停電した後に復旧した際に、簡便な制御で、ロボット本体が迅速に作業を再開できるようにする。
【解決手段】演算器は、ロボット本体の一連の作業を予め複数の作業区分に分割し、主電源の電力供給によって、順次、ロボット本体に作業区分毎に作業を実行させる(S21〜S25)。演算器は、主電源が停電したときに、補助電源の電力供給によって、複数の作業区分のうち、主電源が停電した時点での作業区分の作業を終えるまでロボット本体に作業を継続させる(S27)。演算器は、主電源が停電した時点での作業区分の作業を終えたときに、主電源の停電が復旧するまでロボット本体による作業を停止させる(S28)。演算器は、主電源の停電が復旧したとき、ステップS27の処理にてロボット本体に行わせた作業区分の次の作業区分からロボット本体に作業を再開させる(S30,S31,S22)。
(もっと読む)
ロボット歩行装置
【課題】構造が簡便で製造費が安価で且つ堅牢な、競走競技に適した歩行ロボットを提供する。
【解決手段】ロボット走行装置は、胴体と、1対の脚部と、前記脚部の下端部に装着された足裏部材と、前記1対の脚部を交互に走行させる駆動機構を有する。脚部は、ロボットの胴体の矢状面に対して垂直に配置された枢動軸回りに枢動可能に構成され、駆動機構は、遠隔操縦によって回転可能なモータと、該モータの軸に装着された回動板と、該回動板の両側に装着された1対の揺動軸と、を有する。
(もっと読む)
把持装置及びその制御方法
【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
ウエハ搬送ロボット
【課題】半導体ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
(もっと読む)
ロボット及びロボットシステム
【課題】ロボットの制御性と安全性とを両立させる。
【解決手段】ロボットは、固定子31及び回転子を有するモータを関節機構S1に備えている。このロボットは、モータの固定子31が連結される第1リンク部材L1と、モータの回転子が連結される第2リンク部材と、モータの固定子31と第1リンク部材との間に設けられた弾性部材30とを有している。そして、この弾性部材30は、磁場によって弾性率が変化する可変弾性ソフトマテリアルで構成されている。
(もっと読む)
ロボット用肢体駆動機構、およびこの肢体駆動機構を用いたロボット装置
【課題】低コストで製造可能であり、上肢を上方に持ち上げてその状態を長時間維持することができるロボット装置と、ロボット用肢体駆動機構を提供する。
【解決手段】ロボット用肢体駆動機構は、胴体部11と、胴体部11に対して可動自在に設置される肢体支持部材21と、肢体支持部材21に対して設置される可動肢体22と、胴体部11に固定設置されて駆動力を及ぼすアクチュエータ24と、複数のリンク23a,23cと、当該複数のリンク23a,23cを可動自在に接続するジョイント23bとから構成され、一端側のリンク23aがアクチュエータ24に接続し、他端側のリンク23cが肢体支持部材21と接続することで、アクチュエータ24と肢体支持部材21とをリンク接続するリンク部材23とを備えており、アクチュエータ24から及ぼされる駆動力が、リンク部材23を介して肢体支持部材21に伝達される。
(もっと読む)
ロボットハンド装置
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
サーボ、および、これに用いられるコネクタ
【課題】直列に接続することを可能にし、かつ配線の複雑度および構造を組み立てる際の難度を低減可能なサーボを提供する。
【解決手段】駆動部は、ハウジング20内に装着され、出力軸を有する。メス接続部はハウジング20内に装着され、メス端子364を有し、メス端子364は駆動部の出力軸に接続され、出力軸に駆動され回転可能である。オス接続部はハウジング20内に装着され、オス接続部とメス接続部とは駆動部の向かい合う両側に位置付けられ、かつ電気的に接続される。オス接続部はオス端子を有し、オス端子とメス接続部のメス端子とは互いに対応し、かつ別の一つのサーボのメス接続部のメス端子の接続に用いられる。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】コイル端部ロスを生じない巻線構造によって、コアレスでありながら高トルクのモーターを提供する。
【解決手段】円柱形状の回転体と、前記回転体の中心軸方向に延設される回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体を覆う円柱缶状のステーターと、を備え、前記回転体は、円柱底面部に円周方向にN極とS極とが交互に配置される第1磁石と、円柱側面部に円周方向にN極とS極とが交互に配置される第2磁石と、を有し、前記ステーターは、前記回転体の前記円柱底面部に対向する部位と、前記回転体の前記円柱側面部に対向する部位と、中央に空隙部と、を備える複数の空芯巻線を有するモーター。
(もっと読む)
把持機
【課題】形状の異なる多品種のワークを把持可能である汎用性の高い把持機を提供することを目的とする。
【解決手段】アクチュエータにより指部を開閉してワークを把持する把持機である汎用ハンド50であって、前記アクチュエータは、当該アクチュエータ自体を前記指部の開閉方向に揺動自在にフローティング支持するフローティング機構を有する。また、3つの前記アクチュエータである電動チャック8、16、24を備え、そのうち2つの電動チャック16、24は、それぞれ一対の指部を有するとともに各一対の指部の開閉方向が平行になるように配置され、残る1つの電動チャック8は、前記2つの電動チャック16、24が有する前記各一対の指部の開閉方向に対して直交する方向に、前記2つの電動チャック16、24を開閉することで、前記2つの電動チャック16、24が有する前記各一対の指部を前記直交する方向に開閉する。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】高出力が得られるコアを備えるコイルと、コアを備えない配線と、を備え電流の切換頻度を少なくすることにより、ブラシの長寿命化を実現する小型モーターを提供する。
【解決手段】回転可能に支持された回転軸の中心に直交し、前記回転軸に固定される回転体と、基体に固定され円周方向にN極とS極とが交互に配置された磁石と、を備え、前記回転体は、前記回転軸の回転中心を通る放射状の直線に平行に延伸された1以上の駆動配線と、円周状に配置された複数の渦巻状導体配線と、前記渦巻状導体配線内に配置されたコアと、前記駆動配線に接続された第1整流子と、前記渦巻状導体配線に接続された第2整流子と、を備え、前記第1整流子に接触し、電力を供給する第1ブラシと、前記第2整流子に接触し、電力を供給する第2ブラシと、を備え、前記渦巻状導体配線は、前記回転軸の軸方向の平面視において、前記駆動配線と重ならないモーター。
(もっと読む)
ロボットハンドの挟み込み軽減機構及びロボットハンド
【課題】高い安全性と大きな指先力を確保できるロボットハンドの挟み込み軽減機構を提供する。
【解決手段】本発明の一形態に係るロボットハンドの挟み込み軽減機構1は、駆動機構6から伝達される駆動力によって開閉する一対のハンド部2を備えるロボットハンドの挟み込み軽減機構であって、ハンド部2が開方向に回転駆動するときのみ、ハンド部2に所定の大きさの負荷が作用すると、駆動機構6からハンド部2への駆動力の伝達を減少させる過負荷軽減機構7を備える。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 ブレーカの容量を低減させつつ、ロボットの遮断動作の頻度を低減させることができ、しかも異常原因の検証を容易に行うことができるロボット制御装置を提供する。
【解決手段】 複数のモータ2jの速度をそれぞれ検出する速度検出器10jと、複数のモータ2jに流れる電流をそれぞれ検出する電流検出器9jと、モータ2jの速度ωjおよびモータ2jに流れる電流Ijからロボットの推定消費電力Pを算出する演算器81と、推定消費電力Pがブレーカ4の電流許容値を基準として異常であるか否かを判定する判定器82と、当該判定において推定消費電力Pが異常であると判定された場合に、ロボットをブレーカ4のトリップを回避するよう制御するための制御器83とを備えている。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
多関節ロボットおよびロボット関節構造
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
直流モーター、直流モーターを搭載したロボットハンド、およびロボット
【課題】小型で高トルクの直流モーターの提供。
【解決手段】回転軸112の中心から所定角度毎に、N極またはS極の何れかの極性に交互に着磁した円板形状の永久磁石をローター110とし、ローター110の着磁面と向かい合わせて電流経路基板120を設ける。電流経路基板120には、ローター110の回転軸112を中心として所定角度の中心角を有する扇形形状の半径部分に沿って形成した往き側経路と、扇形形状の円弧部分に沿って形成した戻り側経路とを少なくとも一部に含んだ第1の電流経路と、第1の電流経路の往き側経路と戻り側経路とに囲まれた扇形形状の領域内の位置に、渦巻き状に形成した電流経路を少なくとも一部に含む第2の電流経路とを形成する。ローター110からの磁界の下で第1および第2の電流経路に電流を流すと、ローレンツ力および磁力を用いて回転トルクを発生させることができるので、小型で高トルクな直流モーターを構成できる。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
21 - 40 / 834
[ Back to top ]