
Fターム[3C007HT19]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | ネジ移動 (226)
Fターム[3C007HT19]の下位に属するFターム
ボールネジ (168)
Fターム[3C007HT19]に分類される特許
1 - 20 / 58
ワークピッキングシステム
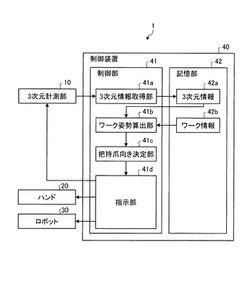
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ワーク搬送装置

【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】定常的に大きな負荷が作用した場合にも効率を損なわず、柔軟な動作と周囲に対する安全を確保できるアクチュエータ装置を提供する。
【解決手段】ロボット装置やパワーアシスト装置の関節駆動に用いられるアクチュエータ機構において、選択的に駆動制御されるモータ11と、バネ要素20と、モータ駆動によりバネ要素の発生力および/またはその向きを変化させる変更機構と、バネ要素に接続された出力端22とを設けて構成する。一実施例の変更機構は、モータ駆動によって傾斜量が変化する傾斜レール16を具えるとともに、バネ要素は傾斜レールの傾斜方向へその角度に応じた力を発生し、これにより出力端が前記傾斜レールの角度に応じた力でその傾斜方向に付勢される。
(もっと読む)
多段直動アクチュエータ及びロボットハンドの指機構
【課題】ロボットハンドの指機構の屈伸用駆動系の簡素化を可能とするようなアクチュエータの提供。
【解決手段】進退動を行う直動軸3(3a、3b、3c)を有した複数の直動モータ2(2a、2b、2c)を組み合わせて多段直動アクチュエータ1を形成する。それについて、直動モータそれぞれの直動軸を中空構造として軸腔を有するように形成し、そして隣接前段の直動モータの直動軸の軸腔に対し隣接後段の直動モータの直動軸が挿通するように、各直動モータを組み合わせることで、各直動モータそれぞれの直動軸が同一の軸芯上で個々に進退動をなせるようにしている。
(もっと読む)
ピックアップ装置
【課題】板状体の大きさや形状に簡単に対応させることができ、しかも、スルーホールを有する板状体であっても確実に吸着させる。
【解決手段】板状体4を吸着させてピックアップするピックアップ装置を構成する際、表面に複数の吸着口24を有する第一の吸着ユニット21と、第一の吸着ユニット21の左右に設けられ、表面に複数の吸着口24を有する複数の第二の吸着ユニット22と、第二の吸着ユニット22をスライドレール31に沿って離間させるためのリードスクリュー32を備えるようにする。そして、リードスクリュー32のネジ山を、第一の吸着ユニット21に対してそれぞれ逆方向に設定し、リードスクリュー32をモーター33で回転させることによって、第二の吸着ユニット22を同時に離間させる。
(もっと読む)
コンパクトな駆動ユニットを持つ広報用ロボット
【課題】人体模型を屈伸駆動させる駆動ユニットをコンパクトにして人体模型に内蔵し、人体模型の屈伸動作を滑らかに進行させることでより効果的な広報になるようにした広報用ロボットを提供する。
【解決手段】下体部と、前記下体部の上部に屈伸動作が可能に結合される上体部とを含む人体模型;及び駆動モーター、前記駆動モーターに回転可能に結合されるスクリューバー、前記スクリューバーに昇降可能に結合される昇降部材と、下部は人体模型の下体部に配置され、上部は人体模型の上体部に固定結合されて配置され、固定軸に回転可能に軸設されている回転ロッド、上端は前記回転ロッドの下端に軸設され、下端は前記昇降部材に軸設され、前記固定軸を軸として前記回転ロッドを一定範囲内で回転させる中継ロッドとを含む駆動ユニット;を含んでなる広報用ロボット。
(もっと読む)
アーム装置
【課題】積極的に入力トルクと出力リンクの比を変化させ得るアーム装置を提供する。
【解決手段】アーム装置10であって、第一アーム1と、第一アーム1に対して第一軸11aを中心に回転可能に連結される第二アーム2と、第二アーム2に対して第二軸12aを中心に回転可能に連結されるリンク3と、リンク3に対して第三軸13aを中心に回転可能に連結されかつ第一アーム1に対して第四軸14aを中心に回転可能に連結されかつ第三軸13aと第四軸14aとの連結距離を伸縮可能に連結する入力機構4と、第三軸13aと第四軸14aとの連結距離20を伸縮させ得る伸縮源9と、第一アーム1に対して入力機構4を回転させることで第二アーム2を第一アーム1に対して回転させ得る動力源18とを有する。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で確実かつ精度良く変更することができ、しかもパイプ部としてのスピンドルガイド部が湾曲した状態でも姿勢変更させられて、全体構成がコンパクトな遠隔操作型アクチュエータを提供する。
【解決手段】 スピンドルガイド部3の先端に先端部材を姿勢変更自在に取付け、先端部材に工具を回転自在に設ける。スピンドルガイド部3の内部に、工具回転用駆動源41の回転をスピンドルに伝達する回転軸22と、姿勢変更用駆動源42で進退動作させられて先端部材を姿勢変更させる姿勢操作部材31とを設ける。姿勢変更用駆動源42の回転を減速する減速機構43と、減速された出力を回転運動から進退運動に変換する動作変換機構44Aと、この動作変換機構44Aの出力により姿勢操作部材31を進退動作させる出力部材51とを設ける。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
腱駆動型指作動システム
【課題】腱駆動型指作動システムを提供すること。
【解決手段】人間型ロボットが、少なくとも1つの指を有するロボット手を備える。ロボット指のための作動システムが、ロボットにより支持され、指から離間された、アクチュエータアセンブリを備える。腱が、アクチュエータアセンブリから少なくとも1つの指まで延在し、腱ターミネータにて終端する。アクチュエータアセンブリは、腱ターミネータを、したがって指を動かすために、腱を作動させるように作動可能である。
(もっと読む)
手術用マニピュレータ
【課題】指掛かり部が軸心に対して片側に偏った位置に形成された既存の鉗子を位置決めし、且つ、鉗子を開閉させる機構を有し、鉗子開閉時に生じる回転モーメントを吸収することのできる手術用マニピュレータを提供する。
【解決手段】指掛かり部122,124が軸心に対して片側に偏った位置に形成された鉗子120を装着可能な保持手段61を具える支持台60と、前記鉗子の指掛かり部を開閉させる開閉機構70と、該支持台を複数の軸回りに回転可能に保持する回転台50と、該回転台を平面方向及び/又は垂直方向に直線及び/又は回転作動可能に支持するアーム部30と、を有する手術用マニピュレータであって、回転台は、アーム部に対する支持台の各軸回りの回転を固定するロック機構51,55,57を有する。
(もっと読む)
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
単軸ロボット
【課題】シャッタ部材を円滑に案内できるようにする一方で、可動部材の構成を簡素化し、生産性やメンテナンス性を向上させる。
【解決手段】単軸ロボットは、ケース部材と、これに収容される可動部材10と、ケース部材の開口部を塞ぐシャッタ6とを備える。可動部材10は、一対の工具取付部12(突出部)および樹脂材料からなるシャッタ案内面を備える本体11と、シャッタ案内面Fgを覆うように本体11に装着されてシャッタ通過用の隙間Sを形成する樹脂材料からなるテーブルカバー16とを含む。本体11およびカバー16は、カバー16を本体11の上部に重ねた状態で互いに係合し、カバー16を本体11に対して係止する係止部をそれぞれ備える。カバー16は、その上面部に、工具取付部12に取付けられる工具が当接することにより本体11に対するカバー16の上方への変位を規制する変位規制部を有する。
(もっと読む)
単軸ロボット及びケース部材
【課題】構成の簡素化及び低廉化を図る共に生産性及びメンテナンス性を向上させる。
【解決手段】単軸ロボットは、前後方向(一軸方向)に延びるケース部材と、これに収容される可動部材10と、この可動部材を移動させる駆動手段とを含む。ケース部材は、可動部材10を前後方向に移動可能に支持するガイドレール2及び支持ブロック26,27等のカバー固定用部材と、このレール2の当該レール2に沿って前後方向に延びる一対の側面カバー3と、支持ブロック26,27等に固定される端面カバーとを有する。端面カバーは、各側面カバー3と嵌合可能な嵌合部を有し、各側面カバー3は、それぞれ端面カバーに嵌合することにより両端面カバーに挟持された状態で、当該端面カバーを介してガイドレール2に固定されている。
(もっと読む)
搬送装置
【課題】第1軸方向、第2軸方向の等速移動区間を長くでき、また、第1軸方向および第2軸方向のうち、いずれかの方向で単独で行われる加速・減速の回数を少なくする。
【解決手段】第1軸ガイド8に沿って移動するスライダー9の移動方向J1と、第2軸ガイド10に沿って移動するホルダー11の移動方向J2が、ホルダー11に取り付けられたチャック6の把持および把持解除の前後に行われる垂直方向の上下移動並びに搬送対象物を搬送元から搬送先に向かって運ぶための水平方向の搬送移動とに対し、平行ではなく、チャック6が搬送対象物を把持してから搬送先で把持解除するまでのホルダー11の移動を、第1軸駆動機構によるスライダー9のJ1方向への移動と第2軸駆動機構によるホルダー11のJ2方向への移動とを合成することによって行わせる。
(もっと読む)
1 - 20 / 58
[ Back to top ]