
Fターム[3C007LT11]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 位置の補正 (291)
Fターム[3C007LT11]の下位に属するFターム
作業対象物の位置ずれに対するもの (141)
慣性、重量、温度等を補償するもの (42)
内部状態によるもの(例;製作誤差) (50)
手動設定による補正 (7)
Fターム[3C007LT11]に分類される特許
1 - 20 / 51
ロボット、ロボットシステムおよび回転電機
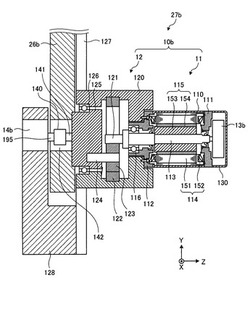
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置

【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
力制御装置
【課題】力覚センサの低コスト化を実現しながら、ロボットの先端部に作用する外力を高精度に算出すること。
【解決手段】モータにより駆動されるロボット3と、前記ロボット3の先端部が指令位置に追従するように前記モータを駆動する電流指令を生成するロボット制御手段2と、前記ロボット3の先端部の6個の動作方向のうち、x軸方向、y軸方向、z軸方向の3個の動作方向の夫々にかかる外力を検出する力覚センサ31と、前記力覚センサ31の検出値、前記モータの位置、および前記電流指令に基づいて、前記ロボットの先端部のn個の動作方向のうちの少なくとも前記力覚センサ31が外力を非検出とする3つの軸の回転方向の外力算出に必要となる摩擦係数を夫々同定し、当該同定した摩擦係数に基づいて当該3つの軸の回転方向にかかるモーメントの推定値を算出する力推定オブザーバ4と、を備える。
(もっと読む)
真空処理装置、電子部品の製造方法及び真空処理プログラム
【課題】 基板搬送用ロボットのフィンガーの変形を精度よく検出する。
【解決手段】 基板を保持可能なフィンガーを有した基板搬送用のロボット、及び、前記ロボットにより基板を搬出入させるための基板搬送口を備えた搬送チャンバと、前記基板搬送口に着脱可能に接続され、前記搬送チャンバ内部に連通する開口を有し、外部に対して密閉された内部空間を形成する筐体、及び、前記内部空間に挿入される前記フィンガーの変形を検出するための変位センサを備えたセンシングポートと、前記搬送チャンバに設けられる排気口を介して、前記搬送チャンバ及び前記筐体内部を排気する排気手段と、前記排気手段により前記搬送チャンバ及び筐体内部を減圧させた状態で、前記筐体の内部空間に挿入されたフィンガーの形状の前記変位センサによる検出結果を取得する制御手段と、を備える。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び姿勢のずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置及びロボット装置の制御方法を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、閉じたときに錘形状となる把持ツメを手先に有するマニピュレータ1の手先を作業台上に設けられた位置基準部7に当接させることによって、位置合わせのための教示動作を行う。
(もっと読む)
搬送装置及びその位置決め方法
【課題】センサフィードバックなしに、搬送装置の位置決め精度を高める技術を提供する。
【解決手段】搬送装置100は、自走台車10、自走台車に取り付けられたロボットアーム12、係合器14、及び、コントローラ18を備える。係合器14は、ロボットアーム12の先端に取り付けられている。また、係合器14は、ワークラック90の基準ブロック92と係合するように構成されている。係合器14は、係合すると基準ブロック92との相対位置が正確に定まるように構成されている。コントローラ18は、まず、係合器14が基準ブロック92に届く範囲に自走台車10を移動させる。次いで、自走台車10の車輪を受動回転自在状態としながら、係合器14を基準ブロック92に係合させるように係合器14を制御する。係合器14と基準ブロック92の間に作用する反力によって自走台車10の位置が修正される。
(もっと読む)
搬送装置
【課題】予め設定された搬送軌道を位置ズレに応じて補正するにあたり、補正前の搬送軌道の特性を損なうことなく、位置ズレに応じて搬送軌道を補正する新たな搬送装置を提供する。
【解決手段】搬送装置は、始点Sから終点Eまで搬送軌道Ptに沿って搬送対象物を搬送する装置であり、予め設定された搬送軌道Ptを用いて搬送制御を行うにあたり、目標となる終点E’が搬送軌道Ptの終点Eから位置ズレしている場合に搬送軌道Ptの終点Eが目標終点E’となるように搬送軌道Ptを補正する。軌道Ptを補正するにあたり、搬送装置は、補正前の終点Eと補正後の目標終点E’とのズレベクトルを、始点Sから目標終点E’の区間にわたり、按分して、搬送軌道を漸次的に補正し、補正後の軌道Pt’とする。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
スポット溶接システム
【課題】撮像装置を用いることなくワーク位置修正を可能とする。
【解決手段】可動電極駆動用のサーボモータ24のトルクまたは速度と相関関係のある物理量を検出する物理量検出手段24aと、一対の電極21,22の位置を検出する位置検出手段13a,24aと、動作モードを切り換えるモード切換手段6と、スポット溶接モードにおけるスポット溶接処理および位置修正モードにおける位置修正処理を実行する処理手段3,4とを備える。処理手段3,4は、位置修正モードに切り換えられると、可動電極21がワーク表面に当接するようにスポット溶接ガン2およびロボット1を制御するとともに、物理量検出手段24aの検出値に基づき、可動電極21がワーク表面に当接したか否かを判定し、そのときの位置検出手段13a,24aの検出値に基づき、ワーク位置を演算する。
(もっと読む)
較正治具、ワーク設置台及び較正方法
【課題】ワークもしくはワーク設置台に対して高精度な座標系を設定することが可能な較正治具を提供する。
【解決手段】ロボット装置の作業対象である対象ワークを設置するワーク設置台20のワーク設置部22と嵌め合い可能な形状を有する嵌合部12と、3点計測法によるワーク直交座標系を設定するための位置データの計測個所として3個所に設けられた較正用マーク32a,32b,32cとを備え、嵌合部12とワーク設置部22とを嵌め合わせてワーク設置台20に設置し、ワーク設置台20上での位置データの計測を可能とする。
(もっと読む)
自動作業システムにおける位置ズレ補正方法及び位置ズレ補正プログラム
【課題】位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレを検出して補正する。
【解決手段】アームの先端部位に保持ツール105及び慣性センサ106を具備する位置決めロボット100と、アームの先端部位に作業ツール205を具備する作業ロボット200と、ロボット制御装置300と、を有した自動作業システムにおいて、位置決めロボット100によりワークを保持した保持ツール105をワークの作業位置に応じた保持ツール105の位置決め基準位置P0に搬送して位置決めするとともに、作業ロボット200により当該ワークに対し所定の作業を行う際、ロボット制御装置300は、慣性センサ106の慣性力に基づいて保持ツール105の位置決め基準位置P0からの位置ズレ量ΔP1を検出し、検出した位置ズレ量ΔP1に基づいて保持ツール105の位置決め基準位置を位置ズレ前の位置P0に補正する。
(もっと読む)
ロボット制御装置及び方法
【課題】補正された位置姿勢値を一意の各軸値に逆変換できない特異点において、ロボットの位置決め精度を向上する。
【解決手段】
コントローラ2は、補正された位置姿勢指令値をロボット7の各関節駆動軸の回転量を表す各補正軸指令値に逆変換できるか否かを判断し、逆変換できるときに、補正位置姿勢指令値を各補正軸指令値に逆変換し、各補正軸指令値から補正前の各軸指令値を減算することにより各関節駆動軸の補正値を算出してメモリ3に格納する一方、逆変換できないときに、制御タイミングの直前の少なくとも1つの制御タイミングにおいてメモリ3に格納された各補正値に基づいて各関節駆動軸の推測補正値を算出し、各推測補正値を補正前の各軸指令値に加算することにより各補正軸指令値を算出するとともに、各推測補正値を各補正値としてメモリ3に格納する。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】補正を行うためのセンサを必要とせずに、制御精度を向上させることができるロボットの制御装置を提供する。
【解決手段】制御に伴う演算の結果より把握されるアーム6の手先位置を基準に手先移動量を決定すると、移動先の目標位置を決定する。目標位置はアーム6の各軸目標回転角度に変換され、目標回転角度はエンコーダ9が出力するパルス数相当の指令値に変換される。その指令値に応じてモータ5を駆動制御し、エンコーダ9が出力するパルス数が回転角度に変換されると、変換された回転角度と目標回転角度との差分を求め累積する。変換された回転角度は位置にも変換され、位置誤差蓄積部32はその位置と目標位置との差分を求め累積する。累積された位置誤差量が指示可能な移動量の最小単位以上あれば、最小単位で除した商を手先移動量に加算してモータ5に出力し、剰余を位置誤差蓄積部32に格納して累積値を更新し、累積されている角度誤差量をゼロクリアする。
(もっと読む)
加工システム
【課題】搬送レール等の軌道部材を用いることなく床面に設定した走行経路を搬送装置に走行させる無軌道型搬送システムを用いるとともに、走行経路に沿って配置された各工作機械に対する搬送装置の位置を、より高精度に位置決めすることが可能な加工システムを提供する。
【解決手段】搬送装置20は、走行経路R1に沿って床面F上にて走行及び停止可能な台車21と、ワークWの搬入または搬出を行うロボット22と、工作機械MCnに設けられた被連結手段CM(または連結手段CA)と連結可能な連結手段CA(または被連結手段CM)とを備え、工作機械には、自己の搬入・搬出位置に到達した搬送装置の連結手段と連結可能な位置に被連結手段が設けられており、搬送装置は、任意の工作機械の搬入・搬出位置に到達すると、連結手段と被連結手段を連結し、工作機械に対するロボットの相対位置及び相対方向を補正した後、ワークの搬入またはワークの搬出を行う。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、並びに、集積電子回路
【課題】作業者が簡単に短時間でロボットの教示を行うことが可能な、操作性の良い効率的なロボット制御を実現できるロボットアームの制御装置を提供する。
【解決手段】ロボットアーム5の動作を制御してロボットアームによる作業を行うロボットアームの制御装置であって、変更条件設定部で設定されかつ人の操作によってロボットアームの動作を変更するときの変更条件に応じて補正が必要な場合に、動作情報取得部で取得した動作情報を動作補正情報に従って動作補正部で補正し、動作補正部により補正された動作情報に基づいてロボットアームの動作を制御する。
(もっと読む)
自走式ロボットの位置および姿勢の補正方法
【課題】ロボットアームを搭載した自走式ロボットにおいて、走行に伴う滑りなどによる誤差に対処して、ロボットアームの確実な位置および姿勢の補正を可能とする。
【解決手段】自走式ロボット1は、自走可能な走行部2と、走行部2に搭載されたロボットアーム部3とを有している。走行経路上の走行誤差測定位置7で、カメラ13によって走行路面5上の検出マーク14を撮影することによって、走行部2の設定された位置および姿勢からの誤差を検出し、その誤差を走行部2の動作によって補正する。さらに、カメラ20によって作業対象物8を撮影することによって、ロボットアーム部3の設定された位置および姿勢からの誤差を検出し、その誤差をロボットアーム部3の動作によって補正する。
(もっと読む)
ロボット制御装置
【課題】力覚センサを使用せずに、外力をより高精度に推定し、安定した力制御を実現できるロボット制御装置を提供する。
【解決手段】先端位置と位置指令値との誤差を算出する誤差算出部112と、誤差から関節角差分を算出する関節角差分算出部113と、関節角差分からトルク指令値を算出するトルク指令値算出部114と、アクチュエータ115の駆動トルクを推定する駆動トルク推定部107と、駆動トルク及びトルク指令値との差を外部トルクとして算出する外部トルク算出部108と、関節軸角度に基づいてヤコビ行列を算出するヤコビ行列算出部105と、ヤコビ行列及び外部トルクから外力を算出する外力算出部109と、コンプライアンスモデル及び外力から位置指令値に対する修正量を算出する修正量算出部110とを備える。
(もっと読む)
ロボットシステム
【課題】回転軸に対して切削工具を位置決めする構造を不要とし、なおかつ、切削工具を交換した際のティーチングデータの修正を不要としながらも、加工精度の低下を抑制することができるロボットシステムを提供する。
【解決手段】多軸のアームの軸端が回転軸に構成され、或いは、当該軸端に回転軸が付加され、当該回転軸にワークを加工するカッター刃ユニット14を着脱自在に支持し、予めティーチングされたティーチングデータにしたがって前記カッター刃ユニット14の姿勢制御を行うロボット5と、前記カッター刃ユニット14の切れ刃25の前記回転軸周りの位置と、前記ティーチングデータにおける前記回転軸周りの基準位置θsとのずれ量Δ下を検出する検出ユニット21と、を備え、前記ずれ量Δθに基づいて、前記回転軸周りに前記カッター刃ユニット14の切れ刃25の位置を補正するバリ取りシステム1を構成した。
(もっと読む)
1 - 20 / 51
[ Back to top ]