
Fターム[3C058BA01]の内容
仕上研磨、刃砥ぎ、特定研削機構による研削 (42,632) | 制御(検知及び設定) (1,968) | 研削状態の検知 (338)
Fターム[3C058BA01]に分類される特許
41 - 60 / 338
圧電振動子の両面ポリッシング加工装置、及び、両面ポリッシング加工方法
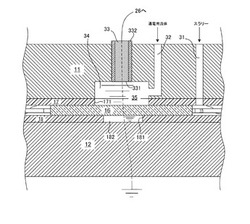
【課題】周波数掃引法によって厚み検出を行う圧電振動子の両面ポリッシング加工において、非導電性のポリッシングパッドの厚み、弾性、あるいは使用時間の影響を実質的に受けることなく、共振周波数の高周波数化と表面粗度への要求とに対応することを課題とする。
【解決手段】上定盤11には、流体貯留部34内に開口し、樋25から通電用流体を供給するための注入路32が設けられている。流体貯留部34内には、電極端面331が流体ポケット35より突出しない位置になるように測定電極33が設けられている。測定電極33は、電極端面331を除いて周囲が絶縁壁332により電気的に絶縁されている。
(もっと読む)
化学機械研磨用の適応終点検出

【課題】 光学監視装置で生成される信号のノイズに拘わらず正しい終点を検出する。
【解決手段】 方法とともに装置が、基板10表面を研磨パッド30に接触させる。光学終点検出装置により、光線42を向けて基板10表面に衝突させる。光学終点監視装置からの信号を監視し、第一の終点基準が第一の時間ウィンドウ内で検出されない場合には、デフォルト研磨時間で研磨を停止する。第一の終点基準が第一の時間ウィンドウ内で検出される場合には、第二の終点基準を得るために信号を監視し、第二の終点基準が検出される場合に研磨を停止する。
(もっと読む)
ワイヤソーのトラバース装置
【課題】ワイヤ繰り出し位置とスライダの位置とのずれの発生を抑制する。
【解決手段】トラバース装置は、リール9Aから繰り出されるワイヤWが掛け渡されるガイドプーリ50を備えたスライダ40と、このスライダを駆動するトラバースモータ46等を備える。トラバース装置は、さらにワイヤWに接触可能に配置される一対のタッチローラ56a,56bと、これらに対するワイヤWの接触荷重を検出するロードセル60a,60bと、これらの検出荷重に基づきトラバースモータ46を制御する制御装置62等を備える。制御装置62は、ロードセル60a,60bのうち何れかにより接触荷重が検出されると、当該荷重が生じた側のタッチローラとワイヤWとが非接触状態となるように、検出された接触荷重に基づいてトラバースモータ46を制御することによりスライダ40の位置をワイヤ繰り出し位置Pに対して相対的にシフトさせるシフト動作を実行する。
(もっと読む)
CMPプロセス中のインシチュウ終点検出に用いるポリッシングパッド
【課題】研磨プロセスに関して正確性を向上し更に有用な情報を与えるために用いる事ができる終点検出用ポリッシングパッドを提供する。
【解決手段】ポリウレタン材料製の第1層22とその背面に配置され、第1層材料より軟質の第2層材料20からなるポリッシング面に形成されたホール30と、そのホールに挿入されたクオーツインサートから構成される透明ソリッド部分と、このポリッシング面とは反対の面に形成され、前記透明ソリッド部分と調芯され、かつ透明ソリッド部分にまで延びる溝を有する構造のポリッシングパッド18であり、基板上の層の均一性を、係る層の研磨の最中にインシチュウで測定するために使用する。
(もっと読む)
ワイヤソーのガイドプーリ磨耗検出装置及び磨耗検出方法
【課題】ワイヤソーにおけるガイドプーリの磨耗を早期に検出する。
【解決手段】ガイドプーリ7の案内溝27を経由してワイヤ2を複数の溝ローラ11間に巻き掛け、ワイヤ2を走行させて溝ローラ11間のワイヤ2にワーク15を押し付けることによってワーク15を切断するワイヤソーにおいて、前記ワイヤ2の所定走行速度及び前記ガイドプーリ7の案内溝27の初期外径d1を設定することで、予め前記所定走行速度におけるガイドプーリ7の所定範囲の回転数を設定する制御部と、ガイドプーリ7の回転数を検出するセンサ32とを備えるガイドプーリの磨耗検出装置19。前記ワイヤソーを駆動してワイヤ2が前記所定走行速度に達した時点でのガイドプーリ7の回転数をセンサ32で検出し、この回転数と予め制御部に設定された所定範囲の回転数とを比較し、ガイドプーリ7の回転数が所定範囲外となったことを前記制御部で判断する。
(もっと読む)
ワイヤソーの電力供給装置
【課題】装置の大型化を抑えながら、停電等の発生時により確実かつ正常に切断用ワイヤの走行を停止させる。
【解決手段】ワイヤソーは、切断用ワイヤを駆動するための駆動モータ25、これを制御するサーボアンプ42等を含む。サーボアンプ42は、電源40から供給される交流電力を直流電力に変換するコンバータ部44と、直流電力を平滑化するとともに蓄積する平滑部46と、直流電力を交流電力に変換して駆動モータ25に供給するインバータ部48と、停電時等に平滑部46に蓄積された電力を用いて駆動モータ25を減速動作に移行すべくインバータ部48を制御する制御部50を含む。平滑部46は、電気二重層キャパシタ46a及び電解コンデンサ46bからなり、停電時には、この電気二重層キャパシタ46a等に蓄積された電力が駆動モータ25に供給される。
(もっと読む)
半導体ウエハの研磨方法
【課題】研磨された半導体ウエハの端部表面形状に関して有利な代替の研磨方法を提供する。
【解決手段】研磨パッドによる半導体ウエハの研磨方法であって、研磨パッドは、平均粒径0.1〜1.0μmを有するSiO2の固定結合砥粒を含み、アルカリ成分を含み、固体材料を含有せず、11〜13.5の可変pH値を有する研磨液が供給され、研磨液は、研磨処理中にpH値13未満を有し、研磨処理を終了する目的で、pH値を13〜13.5に上昇させる、方法。
(もっと読む)
磁気記録媒体用ガラス基板の製造方法
【課題】本発明は、主平面の平滑性と端部形状に優れる磁気記録媒体用ガラス基板を生産性高く研磨するガラス基板の研磨方法、及び該研磨方法を用いた研磨工程を有する磁気記録媒体用ガラス基板の製造方法の提供を目的とする。
【解決手段】本発明は、平均粒子直径が100nm以下の砥粒を含有する研磨液を用いて、ガラス基板の両主平面を仕上げ研磨する仕上げ研磨工程を有する磁気記録媒体用ガラス基板の製造方法において、同一ロット内で研磨されるガラス基板間の板厚偏差を1.5μm以下としてガラス基板の主平面を研磨する。
(もっと読む)
表面処理装置
【課題】回転ブラシの磨耗の程度を良好に検出して、回転ブラシとワークとの間隔を良好に自動的に調整し、表面処理作業の効率化を図る。
【解決手段】回転ブラシ10,20の回転によって空気流が発生すると、流速計100で空気流の流速Vが検出される。演算部210は、外部メモリ250の流速−ブラシ径データ254を参照し、検出した流速Vに対応するブラシ直径Dを得る。演算部210では、得られたブラシ直径Dと、ブラシ初期位置Pと、ワーク厚さWTとから、ブラシ位置調整量ΔPを演算する。このブラシ位置調整量ΔPの値に基づいて、昇降機構12,22によって回転ブラシ10,20の位置調整が行なわれる。
(もっと読む)
研磨監視方法、研磨方法、研磨監視装置、および研磨装置
【課題】研磨の進捗を正確に監視し、さらには正確な研磨終点を検出することができる方法を提供する。
【解決手段】本方法は、基板の研磨中に基板に光を照射し、基板からの反射光を受光し、反射光の強度を波長ごとに測定し、強度の測定値から、強度と波長との関係を示すスペクトルを生成し、所定の時間当たりのスペクトルの変化量を算出し、スペクトルの変化量を研磨時間に沿って積算してスペクトル累積変化量を算出し、スペクトル累積変化量に基づいて基板の研磨の進捗を監視する。
(もっと読む)
研磨パッド
【課題】金属膜の被研磨材を研磨パッド上にスラリーを供給しながら終点検出をおこない研磨をおこなう際に、スクラッチが生じないで良好な終点検出が実現できる研磨パッドを提供する。
【解決手段】研磨層1とクッション層4と窓部材2からなる研磨パッドであって、窓部材2がフッ素を含有する重合体で作成され、該窓部材2には表面から裏面に最大孔径が0.01mm以上0.1mm以下の貫通孔を有していることを特徴とする研磨パッド。
(もっと読む)
ウエーハの研削方法
【課題】 研削後に膜が残存することがないウエーハの研削方法を提供することである。
【解決手段】 所定厚みの膜が表面に被覆されたウエーハを研削して該膜を研削除去するウエーハの研削方法であって、チャックテーブルでウエーハの裏面を保持して、保持したウエーハの厚みを表面から複数点で検出する複数厚み検出ステップと、検出したウエーハ厚みのうち最小値を検出する最小値検出ステップと、検出した該最小値から少なくとも該膜の該所定厚みを減じた値を目標仕上げ厚み値として算出する目標仕上げ厚み算出ステップと、該チャックテーブルで保持したウエーハの厚みを検出しつつ、ウエーハの表面に研削砥石を当接してウエーハとの間で摺動させて、該目標仕上げ厚み値までウエーハを研削することで該膜を研削除去する膜除去ステップと、を具備したことを特徴とする。
(もっと読む)
ガラス板の研磨状況をモニタリングする装置及び方法
【課題】ガラス板の研磨工程において研磨状況を正確且つ迅速にモニタリングすることができる装置及び方法を提供する。
【解決手段】ガラス板研磨状況のモニタリング装置は、ガラス板で研磨装置10により研磨される部分の位置を測定する位置測定部110;研磨装置10に流入する電流を測定する電流測定部120;研磨装置10に流入する電流に対する参照値をガラス板の研磨位置ごとに貯蔵するメモリ部130;及び位置測定部110及び電流測定部120による研磨位置ごとの電流測定値とメモリ部130に貯蔵された研磨位置ごとの電流参照値とを比較して研磨状況の不良可否を判断する制御部140;を含む。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
切削部材の研削装置
【課題】支持部と該支持部の端部に沿って取付けられた刃部とを備えた切削部材の支持部のみを研削して、刃部の切削面を支持部の先端面よりも外方に位置させるようにする研削装置を提供する。
【解決手段】切削部材1を研削する研削装置10であって、前記切削部材1が、支持部4と、該支持部の端部に沿って取付けられた刃部2とを備えてなり、前記研削装置10が、外周面が研削部であって回転駆動される円盤状の研削部材14と、前記研削部材の外周面と前記切削部材とを当接させるように前記切削部材を支持する支持機構18と、を備え、該支持機構は、前記切削部材を保持する保持部材20と、該保持部材を移動させる移動装置22とを備え、前記切削部材の支持部のみが前記円盤状の研削部材の外周面に当接するように前記切削部材を前記研削部材に対して移動できるものである研削装置。
(もっと読む)
データ処理装置、研磨装置、研磨レートの推定方法およびプログラム
【課題】 研磨レートの推定精度を高める。
【解決手段】 研磨中における研磨部分の温度を検出すると共に、温度以外の、研磨レートと関係のある所定の物理量を検出する(ステップS1)。そして、その検出した温度の時間的な変化傾向に基づき研磨期間中における少なくとも2つの異なる時間範囲を設定する(ステップS2)。それら各時間範囲毎の研磨部分温度情報と、前記温度以外の物理量の情報とを利用して、研磨レートを推定する(ステップS3)。
(もっと読む)
高感度実時間形状制御渦電流モニタシステム
研磨パッドを支持する表面を有するプラテンおよび渦電流信号を生成する渦電流モニタシステムを備える化学機械研磨用の装置。渦電流モニタシステムは、磁心および磁心の一部分の周囲に巻かれたコイルを有する。磁心は、後部部分と、後部部分からプラテンの表面に直角の第1の方向に延び、プラテンの表面と平行な第2の方向に幅を有する第1の突起部と、第1の突起部の両側に、第1の突起部から等距離に位置する、後部部分から第1の突出部と平行に延びる第2および第3の突起部とを有する。第2および第3の突起部のそれぞれと第1の突起部との間隔は、第1の突起部の幅のほぼ2倍に等しい。 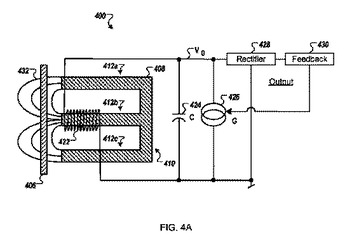 (もっと読む)
(もっと読む)
インゴットの切断方法及びワイヤソー
【課題】ワイヤソーによるインゴットの切断において、プーリーの回転抵抗によってワイヤに過大な張力が掛り、ワイヤが断線に至ることを抑制しながらインゴットを切断でき、その結果、切断するインゴットに段差が発生したり、ナノトポグラフィーが悪化するのを抑制する。
【解決手段】一組のワイヤリールの一方から巻き出され、他方のワイヤリールに巻き取られるワイヤを複数の溝付きローラに巻き掛けし、固定軸によって支持される回転自在な少なくとも1つ以上のプーリーをワイヤリールと溝付きローラ間に配置し、溝付きローラにスラリを供給しつつ、インゴットを切断するワイヤソーによるインゴットの切断方法において、プーリーの固定軸にトルク検出機構を設けてプーリーの回転抵抗値を検出しながらインゴットを切断し、トルク検出機構によって検出されたプーリーの回転抵抗値の異常を検知した際にインゴットの切断を停止するインゴットの切断方法。
(もっと読む)
ワイヤソーの断線検出装置
【課題】ワイヤソーにおけるワイヤの断線を簡単な構造で精度良く確実に検出する。
【解決手段】溝ローラ5間に形成されたワイヤ列に加工物8を押し付けて多数枚に切断するワイヤソー1において、ワイヤ列のワイヤ6の走行路近傍に本体フレーム2と絶縁状態で検出用電線24を張設し、この検出用電線24に所定の電圧を印加する直流電源30と、検出用電線24と直流電源30との間に直列に設けた少なくとも1つの抵抗33と、前記直流電源30と検出用電線24との間に直列に設けた電流計31とからなる直列回路を形成すると共に検出用電線24と直接隣接しないように少なくとも1つの抵抗33又は電流計31を挟んだ位置から直列回路を分岐させて本体フレーム2にアース32を取るように構成しておき、断線したワイヤ6の接触により検出用電線24が切断されて変化する電流値からワイヤ6の断線を検出してワイヤソー1を停止させる。
(もっと読む)
基板研磨装置、基板研磨方法、及び基板研磨装置の研磨パッド面温調装置
【課題】基板研磨装置の研磨テーブルの研磨面の温度を測定し、該測定した温度情報をPID制御によりフィードバックして研磨面を温調しながら基板を研磨する基板研磨装置、基板研磨方法、基板研磨装置の研磨パッド面温調装置を提供する。
【解決手段】研磨パッド11が貼付された研磨テーブル13と、基板を保持するトップリング14とを備えた基板研磨装置において、研磨パッド11面上の温度を検出する放射温度計19と、研磨パッド11面上の温度を調整するパッド温調手段26と、研磨パッド温度情報に基づいてパッド温調手段26を制御して研磨パッド11面上の温度を制御する温度コントローラ20を備え、温度コントローラ20は複数種のPIDパラメータから所定のルールに基づき所定のPIDパラメータを選択し、パッド温度情報に基づいて選択したPIDパラメータを用いて研磨パッド11面上の温度を制御する。
(もっと読む)
41 - 60 / 338
[ Back to top ]