
Fターム[3D114DA05]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | ワーク取扱装置 (1,047) | 搬送装置 (429) | 台車、パレット (146)
Fターム[3D114DA05]に分類される特許
41 - 60 / 146
コンポーネント組立システムおよびコンポーネント組立方法
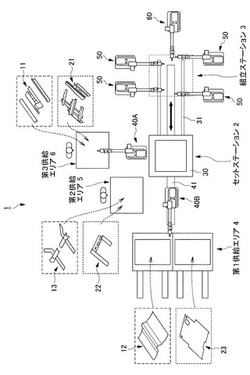
【課題】高精度でフロントフロアコンポーネントを組み立てできるフロントフロアコンポーネントの組立システムを提供すること。
【解決手段】コンポーネント組立システム1は、セットステーション2と、組立ステーション3と、セットステーション2と組立ステーション3との間で移動する搬送台車30と、セットステーション2の周囲に設けられた3つの供給エリア4〜6と、セットステーション2の周囲に設けられて部品11〜13、21〜23をセットステーション2または組立ステーション3に搬送する搬送ロボット40A、40Bと、組立ステーション3の周囲に設けられて組立ステーション3に位置する部品11〜13、21〜23を加工する溶接ロボット50と、組立ステーション3の周囲に設けられて組立ステーション3に位置する組み立てたフロントフロアコンポーネント10、20を払い出す払出しロボット60と、を備える。
(もっと読む)
フロントコンポーネント組立システムおよびフロントコンポーネント組立方法

【課題】ダッシュボードをホイールハウスハウジングおよびサイドフレームに高精度で位置決めできるフロントコンポーネントの組立システムを提供すること。
【解決手段】フロントコンポーネント組立システムは、ダッシュボード14、バルクヘッド13、ホイールハウスハウジング12、およびサイドフレーム11からなる自動車のフロントコンポーネント10を組み立てる。このフロントコンポーネント組立システムは、バルクヘッド13、ホイールハウスハウジング12、およびサイドフレーム11を互いに位置決めした状態で支持する搬送台車22と、ダッシュボード14を把持するダッシュボード把持ハンド53と、ダッシュボード把持ハンド53を移動するアーム54と、を備える。搬送台車22は、ダッシュボード把持ハンド53の第1位置決めピン534および突出部536が接続される位置決めピン嵌合部243および突出部嵌合部244を備える。
(もっと読む)
搬送装置
【課題】簡単な構成で物品の情報を正確に管理できるとともに、載置される物品の形状に関わらずIDタグの情報の読み取りが可能であり、IDタグの取付位置の自由度を大きくし、同一の搬送ラインで形状の異なる物品を取り扱ってもIDタグとIDタグ読み取り装置との距離を一定として読み取りミスを防止する搬送装置を提供すること。
【解決手段】搬送台車110に載置されて搬送される物品に備えられたIDタグ130を搬送ライン近傍で読み取るIDタグ読み取り装置120が、IDタグ130の情報を非接触で読み取るIDアンテナ121と、IDアンテナ121を移動可能に支持する移動機構140とを有していること。
(もっと読む)
搬送装置
【課題】十分な防水機能を備えると共に、異なる処理工程間でのワークの移載が不要な搬送装置を提供する。
【解決手段】搬送装置10は、搬送台車1に支持されたワークBを連続的に搬送する。搬送装置10は、搬送台車1から上方に延びてワークBを支持する支柱2と、搬送台車1の外側かつ両側に対向するように配置された一対の第1防水カバー7・7と、を備える。一対の第1防水カバー7・7を開閉自在に動作させると共に、支柱2を一対の第1防水カバー7・7で両側から挟み込むことにより、ワークBを所定位置に支持する嵌合部7r・7rを一対の第1防水カバー7・7に設けている。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
(もっと読む)
表面処理領域に対して被処理物を搬入及び搬出する装置並びに方法
【課題】生産性の向上、表面処理領域に対する被処理物の搬入及び搬出動作のフレキシブル化並びにコストの低減化を図ることができる表面処理領域に対して被処理物を搬入及び搬出する装置を提供する。
【解決手段】ガイドレールに沿って移動可能な、被処理物Wを支持する複数のキャリア1、キャリア1の被牽引部材に係合する第1係合ドッグが取り付けられた通常速牽引駆動手段11、前記被牽引部材に係合する第2係合ドッグが取り付けられた、通常速牽引駆動手段11よりも牽引速度が速い高速牽引駆動手段12、表面処理領域Cの左右片側に設置した、前記ガイドレールの一部を分割した分割レールを搬送方向右側から見て反時計回りに回転させる回転駆動手段10、前記被牽引部材及び前記第1係合ドッグの係合を解除する第1係合解除手段、前記被牽引部材及び前記第2係合ドッグの係合を解除する第2係合解除手段を備えた。
(もっと読む)
ドア支持装置
【課題】 装置構成が簡素かつ小型であり、汎用性が高いドア支持装置を提供する。
【解決手段】 自動車のサイドドア101を車体100に対して組付け又は取り外す際に、サイドドア101を車体100に対して所定の位置に支持するドア支持装置10であって、荷台21を有する台車11と、荷台21に上方へ向けて突設された支柱12と、支柱12に設けられ、サイドドア101を着脱自在かつ変位可能に支持する上支持部材13と、荷台21に高さ調整機構14を介して上下動可能に設けられ、サイドドア101の下端縁101cを支持する下支持部材15とを備えることを特徴とする。
(もっと読む)
部品供給システム
【課題】ラインサイドの省スペース化を実現する部品供給システムを提供すること。
【解決手段】部品供給システムは、2種類の部品4を搭載して搬送する供給台車1と、台車スペース3を互いの間に形成しつつ2つの工程の近傍にそれぞれ固定配置された固定棚2とを有する。供給台車は、第1部品41を保持する第1レール111と、第2部品42を保持する第2レール112とを平面視において互いに平行に配設してなると共に、放出口12を第1レール及び第2レールの長手方向における互いに反対側の端部に設けてなる。放出口にはストッパー13が配設されている。2つの固定棚は受取口22を台車スペース側に配設し、各工程に部品を供給するための供給口を受取口に対して直交する位置であって互いに同じ方向に設け、部品を保持する受取レール21を有する。台車スペースに供給台車が配置されたとき、供給台車の放出口が固定棚の受取口に対向配置される。
(もっと読む)
搬送装置
【課題】ワークを支持するワーク支持台を搬送台車上の低レベルと高レベルとで支持することができる搬送装置の搬送台車コストの大幅な低減を図る。
【解決手段】ワーク支持台15を高レベルで支持する左右一対の第二支持手段7Aは、ワーク支持台15を低レベルで支持する第一支持手段6Aの前後両側で前後方向に倒れた倒伏姿勢と、上端部が互いに隣接して側面視で三角形となる起立姿勢との間で起伏自在な前後一対の起伏支柱部材11a,11bから構成され、ワーク支持台15には、起立姿勢となった起伏支柱部材11a,11bの互いに隣接する上端部によって支持される被支持部19が設けられ、走行経路側の所要位置には、第一支持手段6Aで支持される低レベルと、第二支持手段7Aで支持される高レベルよりも高い持ち上げレベルとの間で、ワーク支持台15を昇降移動させる昇降装置が配設された構成。
(もっと読む)
車両の組立ライン
【課題】各車体に対する足回り部品の組み付け作業を効率的に行うことが可能な車両の組立ラインを提供する。
【解決手段】車体2を支持した状態でラインに沿って搬送するフロアフリクション台車10を複数備え、前記複数のフロアフリクション台車10・10・・・に支持される車体2・2・・・に対して足回り部品が組み付けられる車両の組立ライン1であって、前記複数のフロアフリクション台車10・10・・・は、車体2・2・・・を、車体2・2・・・の前後方向が車体2・2・・・の搬送方向に直交する姿勢に支持する。
(もっと読む)
弾性力付与機構及び搬送台車
【課題】駆動機構によりワークを変位させる機構の小型化又は低コスト化を実現することが可能な弾性力付与機構及び搬送台車を提供する。
【解決手段】弾性力付与機構26は、基台50と、ワークを支持する支持台と、前記基台と前記支持台の間で平行に配置され、前記支持台に対して弾性力を付与する複数の弾性部材52a〜52fと、前記複数の弾性部材のうち第1弾性部材52a、52b、52d、52eの支持台側端部と、前記第1弾性部材と隣り合う第2弾性部材52b、52c、52e、52fの基台側端部とを連結する連結部材54a〜54dとを備える。前記第1弾性部材の基台側端部は、前記基台側に連結され、前記第2弾性部材の支持台側端部は、前記支持台側に連結される。
(もっと読む)
車体組立方法及び装置
【課題】各分割部材を完成予定の車体の内側から溶接用治具により支える内側固定方式を採用しながらも、全ての分割部材を一工程で溶接して車体の組み立てを完結することができる車体組立方法及び装置を提供する。
【解決手段】キャブ7(車体)を構成する複数の分割部材(アンダーボデー8、フロントパネル9、左右のサイドメンバ10,11、バックパネル12、ルーフパネル13)を箱型に組み付けて溶接するにあたり、完成予定のキャブ7の内側に溶接用治具3が配置されるよう該溶接用治具3をフロントウインド開口部14を通して片持ち支持しておき、前記溶接用治具3により各分割部材(左右のサイドメンバ10,11、バックパネル12、ルーフパネル13)を支えて相互の溶接を行い、その溶接後に前記フロントウインド開口部14を通して溶接用治具3を撤去する。
(もっと読む)
搬送装置
【課題】 簡単な構造で浮き上がりを防止でき、搬送レールRを敷設した搬送台車下部が煩雑にならない昇降可能な搬送装置を提供する。
【解決手段】
進行方向左右側縁には摺動ガイド32を溝状に穿設してなる基台3を備え、パンタグラフ構造の1つのジョイント部が固定回動軸5cとして基台3に係止され、固定回動軸5cと対向する摺動回動軸5dが基台3の摺動ガイド32に案内されて摺動可能に形成され、下部にはガイドレール6に案内されるガイドローラ51が設けられるリンク部5を備え、基台3の上部にリンク部5の昇降によって昇降される昇降台車4を備える搬送台車1と、
軌道Rを設け、所定位置にガイドローラ51の案内溝62を穿設し軌道Rから上方へ突出させるガイドレール6とからなる。
(もっと読む)
生産ライン
【課題】部品搬送ラインの総長さを短くすることができる生産ラインを提供することを課題とする。
【解決手段】(a)に示す比較例では、ワーク搬送コンベア111に沿って口字形状の部品搬送ライン112が設けられ、この部品搬送ライン112の途中に、部品供給センター113が設けられている。空の部品箱114は、図中、L2で示す距離だけ搬送される。加えて、部品搬送ライン112の総長さは大きい。一方、(b)に示す実施例では、ワーク搬送コンベア12に沿って部品搬送ライン16が設けられているが、この部品搬送ライン16の両端に、部品供給センター23、26が設けられている。結果、空のKITボックス15は、図中、L3で示す距離だけ搬送される。このL3は、(a)に示すL2より格段に小さい。そのため、部品搬送ライン16の総長さも小さくなる。
(もっと読む)
車両パネル部品の組付方法及び組付治具
【課題】投資コストを抑制しつつ、作業者への負担を軽減することのできる車両パネル部品の組付方法を提供する。
【解決手段】搬送ライン7を搬送される車体6に、各車両ドア3、4を組付治具12a、12bを介して接触させて、各車両ドア3、4を車体6の搬送速度に同期させながら搬送して組み付けるので、投資コストを抑制しつつ、作業者への負担を軽減することができる。
(もっと読む)
作業台車及びそれを用いた搬送装置
【課題】コンベアを離れた状態で自在に手押しなどによる搬送を可能とする状態と、コンベアにより搬送が行われるコンベア搬送状態とを円滑に実現することができる。
【解決手段】作業台車1は、床面Fを転動するキャスター6を備え、ワークを載せて作業を行うためのものであって、搬送用のコンベアに係脱自在に係合させるための係合部材20、21を備え、この係合部材20、21は、キャスター6の下端以上の位置に待避した待避状態から、キャスター6の下端より下方に進出した進出状態とを選択可能とされている。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
ワーク移動用装置
【課題】加工ライン、組立ラインにおける異なる床面高さにも対応でき、作業者の大幅削減を可能とし、安全に搬入搬出が行えて、不良品発生時などの不定常作業の標準化が可能なワーク移動装置及び移動方法の提案。
【解決手段】搬送対象物(E)を載置するフロワ部分(7)と、搬送対象物(E)を専用台車(AGV)からフロワ部分(7)まで移動し或いはフロワ部分(7)から専用台車(AGV)まで移動する機能を有する移動機構(8)と、前記フロワ部分(7)を上下させる機能を有するアウトリガ(6)と、制御装置(3)とを有している。
(もっと読む)
41 - 60 / 146
[ Back to top ]