
Fターム[3D246JA15]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718) | スリップ率、スリップ量 (98)
Fターム[3D246JA15]に分類される特許
1 - 20 / 98
駐車ブレーキ装置
【課題】駐車ブレーキ装置において、動的駐車制御中に後輪のロック解除が検知されたときの駐車ブレーキの作動応答性を向上する。
【解決手段】駐車ブレーキ装置7の制御装置41において、ダイナミックパーキング制御部59は、車両1の走行中に駐車ブレーキ9,11が作動している状態において後輪3,5のロック作動が検知されれば、コントロールケーブル17,19のストロークを解除側に戻すことで駐車ブレーキ9,11をケーブルのストロークが所定ストローク量Bにとなるように解除し、後輪3,5のロック解除が検知されれば、所定の荷重値Pとなるように駐車ブレーキ9,11を作動させるようにアクチュエータ13を制御する。所定ストローク量Bは、ケーブルのストロークがない初期位置から駐車ブレーキ9,11の作動が完全に解除されるブレーキ解除完了時のストロークまでのストローク量である解除完了ストローク量Aよりも、作動側に増加した量である。
(もっと読む)
路面摩擦係数推定装置および車両用ブレーキ液圧制御装置

【課題】横加速度に基づく路面摩擦係数の推定を精度よく行うことを目的とする。
【解決手段】路面摩擦係数推定装置は、横加速度に基づいて第1の路面摩擦係数CF1を推定する第1の推定手段25と、前後加速度に基づいて第2の路面摩擦係数CF2を推定する第2の推定手段26と、路面摩擦係数CF1,CF2の小さい方を路面摩擦係数CFとする選択手段27を備える。選択手段27は、路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数CFとして選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数CFとして選択する。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
車両挙動制御装置
【課題】特別な対策や構造の変更を必要とすることなく、ブレーキを用いて車両挙動制御する際の油圧系や駆動系の振動騒音の発生を低減させる。
【解決手段】車速、ハンドル角に基づいて目標横加速度を算出し、目標横加速度と実横加速度とに基づいて車両に付加すべき第1、第2の付加ヨーモーメント、を算出し、第1、第2の制動力を算出する。更に、車両の左右輪間車輪速差を算出して第3の制動力を算出する。そして、これら第1、第2、第3の制動力に基づいて各輪に付加する制動力を、少なくとも左側の前後輪に付加する制動力と右側の前後輪に付加する制動力の大きな方の制動力の側の前輪と後輪のブレーキ液圧が同じ値となるように設定する。第3の制動力を出力する際には、トランスファクラッチを略直結状態とする。
(もっと読む)
車両の制御方法及び制御装置
【課題】回生制動装置10と油圧式制動装置30とを備えた車両において、回生制動が付与されている車輪21にスリップが発生したときに、G抜け感の発生を抑制しつつ、上記車輪21のスリップを出来る限り早期に解消する。
【解決手段】回生制動が付与されている少なくとも1つの車輪21のスリップ率が第1所定値以上になったときに、回生制動が付与されている全車輪21に対する回生制動装置10による回生制動力を第1速度で減少させかつ油圧式制動装置30による油圧制動力を増加させ、該油圧制動力の増加後に、スリップ率が上記第1所定値以上になった車輪21に対して、油圧式制動装置30によるアンチロックブレーキ動作を実行させ、回生制動装置30による回生制動力を第1速度で減少させているときにおいて、所定条件が成立したときには、上記回生制動力の減少速度を、上記第1速度よりも低い第2速度に変更する。
(もっと読む)
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
車両のブレーキ制御装置
【課題】一例として自動二輪車1のような車両の制動時に車輪2,3のロックを防止するように、当該車輪2,3に付与するブレーキ力を調整するABS制御において、それらの車輪2,3のロック傾向を直接的に検出し、より適切なABS制御の介入判定を行えるようにする。
【解決手段】車輪2,3の回転速度である車輪速度Vf,Vrの低下率ΔVf,ΔVrが所定の閾値以上であることを含む、ABS制御の介入条件が成立したか否かを判定する(第1および第2の判定部54,55)。介入条件が成立したと判定すればABS制御を開始する(ABS制御部56)。
(もっと読む)
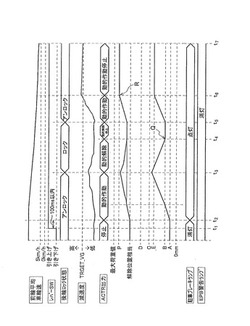
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、第1勾配での通電量の減少を開始した時点(時刻t1)から所定時点(時刻t3)までの初期期間T1と、第1勾配での通電量の減少中に、車輪ブレーキに連通する他の車輪ブレーキが減圧された場合における減圧後のポンプ駆動期間T2と、の間だけオフセット制御を実行する。
(もっと読む)
トラクションコントロール装置
【課題】車両速度の推定にあたり、実際の車両速度との誤差が生じた場合であっても、適切に制御することができるトラクションコントロール装置を提供すること。
【解決手段】車両速度推定装置及び駆動力制御装置を備えたトラクションコントロール装置は、駆動力制御装置を構成し、回転速度検出手段で検出された回転速度から各車輪のスリップ率を算出して、算出されたスリップ率が一定の目標値に収束するように、制動機構の制御を行う制動機構制御手段84と、車両速度推定装置で推定された建設車両の車両速度、及び、制動機構制御手段84で算出されたスリップ率に基づいて、駆動力制御装置による駆動力制御のバランス状態の適否を判定する車両状態判定手段815と、バランス状態が不適であると判定されたら、駆動力制御装置による駆動力制御の状態を変更する駆動力制御変更手段816とを備えている。
(もっと読む)
制動力制御装置
【課題】悪路走行時においても好適にEBD制御を実施可能とする。
【解決手段】制動力制御装置は、左後輪(WRL)に対応する第1油圧系統及び右後輪(WRR)に対応する第2油圧系統を備える車両の制動力を制御する。制動力制御装置は、各車輪の車輪速度を検出する車輪速度検出手段(83)と、後輪の車輪速度が所定の条件を満たした場合に、前輪及び後輪の動作量の差に基づいて第1及び第2油圧系統を制御することで、左後輪及び右後輪の制動力制御を独立して行う制御手段(110,120)と、車両が悪路を走行していることを検出する悪路検出手段(130)と、車両が悪路を走行していることが検出されており、左右いずれかの後輪の車輪速度が所定の条件を満たしている場合に、左後輪及び右後輪の各々のブレーキ油圧を油圧保持制御するよう制御手段を制御する油圧保持制御手段(140)とを備える。
(もっと読む)
自動車コントロール法及び装置
【課題】従来技術における問題を解決する自動車用の改善されたコントロールシステムを提供することである。
【解決手段】自動車速度計算機10が、最も遅い車輪の速度または2輪以上の車輪の平均速度として自動車速度を算出して自動車速度値を決定する構成を有し、車輪スリップ量が各車輪速度を算出した自動車速度と比較して決定される。コントローラ14に所定の車輪スリップ閾値が保存され、第2出力信号としての車輪スリップ量信号16が車輪スリップ閾値と常に比較され、車輪スリップ緩和のためのトルク緩和を要する状況であるか否かが決定される。車輪スリップ量信号16の値が車輪スリップ閾値を上回ると車輪スリップ状況と認定され、パワートレーンから車輪への付加トルクが緩和され、かくして車輪スリップ開始が、またはそれ以上の車輪スリップ発生が防止される。
(もっと読む)
車両のABS制御装置
【課題】車両が凍結路等の低摩擦路面を走行中にABSが作動したときの車両の減速度不足感に伴う運転者の違和感を解消することができる車両のABS制御装置を提供すること。
【解決手段】Gセンサ4や車輪速センサ5の検出値に基づいて各車輪の最適回転速度を算出するABSコントローラ8と、該ABSコントローラ8からの制御信号によって電磁弁9を開閉制御してスリップ率が制御目標値となるようブレーキ圧を制御するABSアクチュエータ10を含んで構成される車両のABS制御装置において、外気温と車両速度が共に設定値以下である場合には制御目標スリップ率を常温・高速時の制御目標スリップ率に対してロック側に変更する。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
車両の制動力制御装置
【課題】 制動時における回生電力の回収効率の向上と車輪のロック状態の早期の回復とを両立させる車両の制動力制御装置を提供すること。
【解決手段】 電子制御ユニット26は、各輪11〜14がロックする傾向を有するとき、蓄電装置20を構成するバッテリのバッテリ容量Yが小さければ左右前輪11,12に設けられたインホイールモータ15,16を回生状態により作動させてモータ制動トルクを発生させるとともに左右後輪13,14に設けられたインホイールモータ17,18を力行状態により作動させてモータ駆動トルクを発生させる。一方、ユニット26は、容量Yが大きければ前輪11,12に設けられたモータ15,16を力行状態により作動させてモータ駆動トルクを発生させるとともに後輪13,14に設けられたモータ17,18を回生状態により作動させてモータ制動トルクを発生させる。
(もっと読む)
電気駆動車両
【課題】加速走行時における加速時間及び減速走行時における制動距離を短縮するとともに、電気駆動車両の振動を抑制する。
【解決手段】駆動輪3,6と、従動輪7,8と、駆動輪を駆動又は制動する電動機1,4と、電動機を制御する電動機制御器33とを備える電気駆動車両において、駆動輪及び従動輪の車輪速度を検出する車輪速度検出器9〜12と、駆動輪及び従動輪の車輪速度から駆動輪のスリップ率を演算する演算手段と、スリップ率がスリップ率判定値を超える場合に駆動輪がスリップしていると判定する判定器とを備える。判定器において、従動輪の車輪速度が設定速度より小さいとき、スリップ率判定値を、従動輪の車輪速度が設定速度より大きいときに利用される値と符号が同じで絶対値が大きい値に変更する。
(もっと読む)
車両の制動制御装置
【課題】 ABS制御開始時の「G抜け感」を抑制することができる車両の制動制御装置を提供する。
【解決手段】 ABS制御の作動を予測するABS作動予測手段を設け、ブレーキコントローラ5は、ABS制御の作動が予測された場合、ABS制御の作動が予測された場合、ブレーキ液圧ユニット19の性能で決まる摩擦制動力上昇勾配に合わせた減少勾配で回生制動力をゼロまで減少させる。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
1 - 20 / 98
[ Back to top ]