
Fターム[3E054DC15]の内容
包装位置への供給−物品の供給 (7,769) | 供給手段(把持、ローラ他) (498) | 把持体 (329) | 作動機構 (136)
Fターム[3E054DC15]の下位に属するFターム
Fターム[3E054DC15]に分類される特許
1 - 19 / 19
物品供給方法およびその装置
【課題】複数品種の袋体を詰め合わせる。
【解決手段】第1袋体10が所定数連なった第1連包体12と、第1袋体10と異なる品種の物品が包装された第2袋体14が所定数連なった第2連包体16とを夫々形成する。各連包体12,16を、袋体10,14が重なるように折り重ね手段26,28で折り重ねる。折り重ね手段26,28から移送手段30,32で移送された連包体12,16を集合させて、供給コンベヤ34によって横形製袋充填機の充填位置Zへ向けて移送する。
(もっと読む)
スライス状物の容器収容装置

【課題】スライス状物を効率良く収容することができる容器収容装置を提供する。
【解決手段】収容装置本体4と、スライス状物Sを容器に収容するための第1及び第2回動受け部材12、14とを備え、第1及び第2回動受け部材12、14は、スライス状物Sを受け取る受け角度位置と、スライス状物Sの両端部を内側に曲げる曲げ角度位置との間を回動自在である。第1及び第2回動受け部材12,14は、スライス状物Sを受け取る支持受部16と、支持受部16に一体的に設けられた曲げ保持部18とを備えている。受け角度位置においては、スライス状物Sが第1及び第2回動受け部材12,14の支持受部16と曲げ保持部18との間に挿入され、受け角度位置から曲げ角度位置に回動されると、第1及び第2回動受け部材12,14の曲げ保持部18がスライス状物Sの両端部に下側から作用して支持受部16を中心として内側に曲げて保持する。
(もっと読む)
シート状電極の製袋自動包装機
【課題】ロール状フィルムから1枚ずつ製作されるセパレータとしての袋にシート状電極を自動的に封入することができる生産効率の高い製袋自動包装機を提供すること。
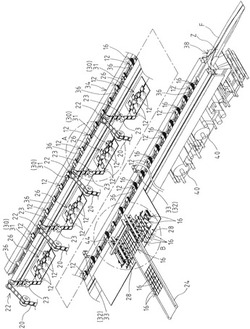
【解決手段】ロール状包装用フィルムから一枚ずつの袋(g)を製作する製袋部10と、多数の小穴が形成されたベルトの下面に真空吸引器を配置した搬送ベルトコンベア38と、製袋部の切り離し用ベルトコンベア27上の袋を搬送ベルトコンベア38上に間欠移送する受け渡し用ベルトコンベア48と、供給されるシート状電極(m)を収めて袋(g)に挿入する多数のガイド70を夫々進退及び左右に開閉自在に設け、搬送ベルトコンベア38のベルトと同期して間欠回転するガイドベルトなどの外周に各ガイドのベース63を取り付けたガイドトラック60と、シート状電極(m)が収納された袋(g)の開口部(h)近くの所定箇所にポイントシールを施すポイントシール手段80とからなる。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
物品ハンドリング装置
【課題】物品を順次搬入する物品搬入コンベアから物品を取り上げ、物品受け止め部に積み込むという作業を能率良く遂行することができる物品ハンドリング装置を提供する。
【解決手段】物品ハンドリング装置10において、複数の物品1を順次搬入する物品搬入コンベア11から、移載ロボット12の第1ピッキングヘッド13と第2ピッキングヘッド14が交互に物品1を1個ずつ吸着し、第1物品受け止め部16または第2物品受け止め部17に積み込む。第1ピッキングヘッド13と第2ピッキングヘッド14を独立して三次元移動させる制御装置15は、第1ピッキングヘッド13と第2ピッキングヘッド14の一方が物品搬入コンベア11から物品受け止め部16、17に向かい、他方が物品受け止め部16、17から物品搬入コンベア11に向かうとき、相互を安全距離に保つ。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
PTPシート搬送装置
【課題】ライン全体の生産能力を極力低下させることなく、多様な包装形態に対応することのできるPTPシート搬送装置を提供する。
【解決手段】搬送装置12は、PTPシート集積体15を保持する複数のチャック21が順次ポジションを移動させながら巡回するチェーンコンベア22を備え、各チャック21を1ポジション送って1回停止するのを1サイクルとした1個送り搬送と、各チャック21を4ポジション送って1回停止するのを1サイクルとした4個送り搬送とを、包装形態に応じて切換え可能に構成されている。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
物品搬送装置
【課題】壊れやすい物品4でも損傷することなく起立させて集積することを可能にする。
【解決手段】物品供給コンベヤ2によって一定の間隔で搬送されてきた板状物品4を、その下方に配置された整列コンベヤ6上に落下させて前方の物品4の後端部上に後方の物品4の前端部を重ねた状態にして供給する。複数の物品4を供給した後、整列コンベヤ6を短時間加速して、複数の物品のグループGと後方の物品のグループGとを切り離す。整列コンベヤ6の下方に、先頭の物品4の下面に係合可能な起立フィンガ50を備えた起立手段18が設けられており、グループ4の先頭の物品4を立ち上げることにより複数の物品4を起立させる。後方の当接部材16と前方の起立フィンガ50によって保持した物品4を、整列コンベヤ6上を横断するプッシャ56によって押し出してトレイ搬送コンベヤ52上のトレイ54内に収納する。
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
箱詰装置
【課題】簡易な構成で確実に包装物を一律に重ね合わせ、箱詰を行うことができる箱詰装置を提供することである。
【解決手段】箱詰装置100においては、第1搬送部200と、第1搬送部200の下方に設けられた第2搬送部400,410とを備える。第1搬送部200の下流端部には、下方に傾斜する傾斜部210が設けられる。柔軟な薄状体によって包装された包装物110が第1搬送部200から第2搬送部400へ落下され、集積部AR1において重ね合わせられる。包装物110は、第2搬送部400,410により第1搬送部200の搬送方向と逆方向の矢印M2の方向に搬送される。
(もっと読む)
袋箱詰め方法及び装置
【課題】既に収められた袋束が倒れないような状態で新たな袋束を箱体内に詰めることができるような袋箱詰め方法及び装置を提供することである。
【解決手段】底面101及び底面101を囲む側面(103a、103b、103c、103d)を有して底面101に対向する前面102が開口する箱体100に複数の袋からなる袋束10を順次詰めていく袋箱詰め装置であって、箱体100をその底面101が水平方向に対して所定角度だけ傾くように支持する箱体支持機構400と、箱体支持機構400によって傾くように支持された箱体100の底面101を背にして前記開口する前面102を通して袋束10を袋面が重ね合わされるように順次積み上げていく袋束積み上げ機構300とを有する構成となる。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
物品保持装置
【課題】物品保持手段4の間隔を縮小した時の、これら各物品保持手段4間の間隔を無段階で、しかも正確に調節する。
【解決手段】複数の保持ブロック16にそれぞれ物品保持手段(バキュームパッド4)が設けられている。保持ブロック16はガイドレール14A、14Bに沿って移動可能になっており、エアシリンダ38によって移動させる。保持ブロック16に固定した円筒部材24にストッパ部材30が螺合され、このストッパ部材30を隣接する保持ブロック16に当てて間隔縮小時の位置決めを行う。このストッパ部材30が前記ガイドレール14A、14Bと平行な回転調節軸22に、軸方向移動可能に、かつ、一体回転するように嵌合しており、回転調節軸22を回転させると、ストッパ部材30が一体的に回転し、保持ブロック16に対して回転調節軸22の軸方向に相対移動して、ストッパ部材30の円筒部材24からの突出量が変化する。
(もっと読む)
容器搬送装置
【課題】 容器そして内容物を傷めることなく高能率で容器を受授できる容器搬送装置を提供することを目的とする。
【解決手段】 第一コンベア装置10と第二コンベア装置20は容器Pを支持しながら搬送するそれぞれの搬送部が定速で連続走行し、中間受渡装置30は、第一コンベア装置と第二コンベア装置のそれぞれの搬送部の搬送範囲の一部L1,L2にて、これらの搬送部に対して交互に同速で並走することを繰り返し、中間受渡装置30の第一コンベア装置10との並走時に該第一コンベア装置10の搬送部が容器に対する支持力を開放して容器Pの落下を可能とすると共に中間受渡装置30の受部33,34がこの落下容器Pを受け、中間受渡装置30の第二コンベア装置20との並走時に上記中間受渡装置30の受部が解放されて容器Pを落下せしめて第二コンベア20の搬送部がこの落下容器Pを受けるようになっている。
(もっと読む)
物品保持装置
【解決手段】 物品保持装置は、複数の物品1が載置されるコンベヤ(載置手段)4と、支持部材14に設けられてそれぞれ上記コンベヤ上の物品を保持する複数のグリッパ(保持手段)15A、15Bと、上記支持部材を昇降移動させるロボット(駆動手段)11と、それらを制御する制御装置16とを備えている。上記制御装置は、空の第2グリッパ15Bで物品1を保持する際には、既に他の第1グリッパ15Aで保持されている物品の下面がコンベヤ4に当接しない高さ位置に上記支持部材14を位置制御した状態で、上記第2グリッパ15Bで物品を保持させるようになっている。
【効果】 従来は、グリッパで保持されている物品の下面がコンベヤに当接しないように各グリッパを昇降させるエアシリンダを設けていたが、これを設けることなく物品の下面とコンベヤとの当接が防止できる。
(もっと読む)
食品の分配及び包装用方法及び装置
少なくとも2つの食品を同一包装物内に包装する、寸法の変わる食品を包装する方法であって、各食品の量を算定する段階と、オブジェクトコンベヤー(2)上の各食品の位置を記録する段階と、各食品を収集領域まで移動させる段階と、食品が部分キャリア(4)まで移動されるべきかをコンピュータプログラムによって決定し、こうした移動が決定された場合、いずれの部分キャリアー(4)に前記食品が移動されるべきかもを決定する段階と、前記食品を持ち上げて部分キャリア(4)まで移動されるべき前記食品を持ち上げる段階と、前記食品を選択された前記部分キャリア(4)まで移動させ、かつ該食品を前記部分キャリア(4)に解放する段階と、を含む方法。 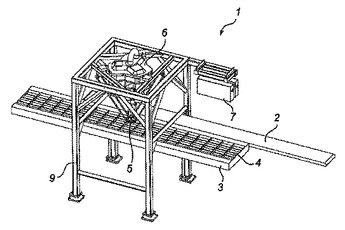 (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]