
Fターム[3F072GA10]の内容
Fターム[3F072GA10]に分類される特許
81 - 100 / 110
ワーク搬送装置
【課題】省スペース化を図りつつ、複数のベルトコンベアによりそれぞれワーク処理装置に移載可能なように、ワークを搬送する。
【解決手段】それぞれがワーク処理装置2に向かってワークWを搬送する複数のベルトコンベア31を、上下方向に複数段に亘って配設したワーク搬送システム3であって、複数のベルトコンベア31の複数の搬送終端部は、ワークWを移載するための上方スペース22が確保されるように、階段状に配設されている。
(もっと読む)
ワーク搬送システム

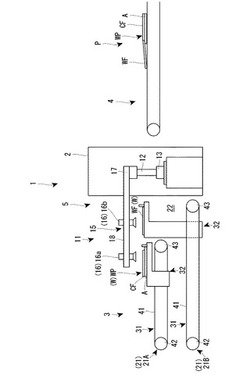
【課題】ワーク詰りが生じることなく、ワークを一つずつ確実に搬送テーブルのワーク収納部に装填することができ、かつリニアフィーダからのワーク供給方向に直交する方向のワーク端子を測定することができるワーク搬送システムを提供する。
【解決手段】ワーク搬送システムは垂直に配置されたテーブルベース2と、テーブルベース2上に回転自在に配置された搬送テーブル3と、搬送テーブル3に対して直交して配置されたリニアフィーダ6とを備えている。リニアフィーダ6と搬送テーブル3との間に、リニアフィーダ6aから供給されるワークwを1つずつ分離する分離シュート7が設けられている。搬送テーブル2の外方に分離シュート7により分離されたワークを90°方向転換する方向転換部30が設けられている。方向転換部30により方向転換されたワークwは、搬送テーブル3のワーク収納溝4内に供給され、その後プローブにより測定される。
(もっと読む)
果物の分類包装システム
卵と果物(10)から成るグループから選択された物品を分類し包装するシステムである。分類包装システムは、複数のキャリヤが設けられた少なくとも1つの分類トラック(1)を有する分類装置と、各物品(10)の少なくとも1つの特性を判定するための少なくとも1つのセンサと、少なくとも1つの特性に従って物品を分類するように構成された制御装置と、例えば、箱、かご、トレイといった包装ユニットを供給して排出し、分類トラックと交差して分類トラックの上方に延在する複数の包装コンベヤを備える。各包装コンベヤに隣接して、包装コンベヤ以上の高さに、移送装置が設けられ、移送装置は、分類装置のキャリヤから前記物品の1つを取り上げ、物品を対応する包装コンベヤの包装ユニットの中に載置するように構成されている。  (もっと読む)
(もっと読む)
ターンテーブル
【課題】被搬送物の進行方向の変更を短時間の内に開始する。
【解決手段】搬送軌道の搬入側と搬出側とにそれぞれ連絡可能にされた入口側端部Aと出口側端部Bとを有し、被搬送物を入口側端部Aから出口側端部Bに搬送する第1軌道3および第2軌道4と、第1軌道3および第2軌道4が設けられたテーブル部材7と、テーブル部材7を任意の回転角度で停止可能に回転させるテーブル回転機構8と、第1軌道3および第2軌道4を搬送される被搬送物の搬送方向の回転を制御するテーブル回転制御機構とを有している。第1軌道3および第2軌道4は、搬送方向が設定されたときに、何れかの第1軌道3および第2軌道4の入口側端部Aが搬送軌道の搬入側に連絡されるように、テーブル部材7に配置されている。
(もっと読む)
容器の分岐装置
固定回転軸(10)を中心として回転する、容器を切替えるための分岐装置(1)であって、回転軸(10)を中心として周囲に配置される少なくとも一つの容器を把持する複数のアーム(7、188)を包含し、各々の把持用アーム(7、188)が、カムの走行トラック(91、184)で係合するためのカムフォロワ(98、186)を包含し、走行トラック(91、184)が、少なくとも一つの固定区分(111、112、115)と少なくとも一つの引込み式カム付き取外し可能区分(120a、120b、194、196)とを包含し、前記装置が、半径方向に可動な把持用アーム(7、188)を固定させる少なくとも1つの回転式横方向テーブル(152、153、185)と、把持用アーム(7、188)のカムフォロワ(98、186)の走行トラック(91、184)を収納する少なくとも1つの固定式横方向テーブル(90a、90b、182)とを包含すること、及び取外し可能区分(120a、120b、194、196)が、固定式横方向テーブル(90a、90b、182)に装着されたアクチュエータ(140a、140b)によって、回転軸(10)に対してほぼ平行方向に引込むことが可能であることを特徴とする。 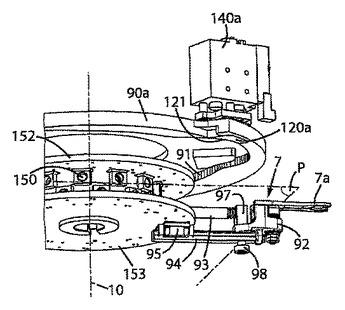 (もっと読む)
(もっと読む)
ワーク搬送装置
【課題】ワーク収納凹部内に残ったワークを外方へ確実に排出することができるワーク搬送装置を提供する。
【解決手段】ワーク搬送装置はベース2と、ベース2上に回転自在に配置され、外周にワークWを収納する多数のワーク収納凹部1aが形成された搬送テーブル1と、搬送テーブル1のワーク排出位置において、ワーク収納凹部1aの一側に配置された噴出口2bと、ワーク収納凹部1aの他側に配置されたワーク排出パイプとを備えている。ワーク排出位置Pに、ワーク収納凹部1b内のワークWの有無を検出する検出センサが設けられている。搬送テーブル1と噴出口2bは制御部20により制御され、制御部20は検出センサ5からの信号に基づいてワークWがワーク収納凹部1bから排出されない場合に、搬送テーブル1を所定距離だけ移動させて、ワーク噴出口2bからエアを噴出する。
(もっと読む)
チップ部品搬送装置
【課題】装置の稼働を止めることなく且つチップ部品にダメージを与えることのないチップ部品搬送装置を提供する。
【解決手段】チップ部品搬送装置は、チップ部品を整列搬送させるフィーダ2と、垂直配置されるとともにチップ部品を1個ずつ保持可能な搬送溝1aを外周面に複数備える第一テーブル1と、第一テーブル1に対して直交且つ隣接配置されるとともに外周側面にチップ部品を吸着保持可能な第二テーブル21とを備えている。第一テーブル1と第二テーブル21とは交互に間欠回転しており、フィーダ2から第一テーブル1に、第一テーブル1から第二テーブル21へとチップ部品の受け渡しが行われる。フィーダは、チップ部品搬送トラックと、戻りフィーダ3とを備えており、垂直配置された第一テーブル1の斜め下方の位置にチップ部品を供給するよう配置されている。
(もっと読む)
頭部付き軸体の搬送装置
【課題】ねじが振動フィーダから回転テーブルに乗り移る際、ねじの軸部が回転テーブルの切欠き溝の縁に引っ掛かるのを防止する
【解決手段】ねじWを吊り下げる2本の平行なレール3,3を有し、そのレール3,3を振動させてねじWをレール3,3の下端3bから排出する振動フィーダ2と、レール3,3の下端3bから排出されるねじWの軸部を導入する切欠き溝8を外周に一定の間隔をおいて形成した回転テーブル1と、その回転テーブル1を連続的に回転させる駆動装置と、ねじWがレール3,3の下端3bからレール3,3の定位置まで整列しているか否かを検知するワークセンサ7と、そのワークセンサ7でねじWがレール3,3の定位置まで整列していないことを検知したときに回転テーブル1の回転速度を下げる制御部13とを有する構成をねじ等の頭部付き軸体すべての搬送装置に採用する。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
底部分離容器排除装置及びそれを備えた容器検査装置
【課題】 底部が分離した底部分離容器を、検査工程に入る前に搬送経路から排除可能な底部分離容器排除装置を提供する。
【解決手段】 本発明の底部分離容器排除装置1は、容器BTの底部と異なる部分を保持する保持状態と、前記容器BTを保持しない非保持状態との間で切替え可能な保持手段7,14,26を備え、該保持手段7,14,26前記容器BTを保持することにより、前記容器BTの底部を支持しない底部非支持領域θ2を含む搬送経路Rに沿って前記容器BTを搬送可能な搬送手段6,7,14,26と、前記底部非支持領域θ2において前記容器BTの底部の分離の有無を検出する検出手段20と、前記検出手段20によって底部の分離が検出された容器BTが前記保持手段7,14,26から解放されるように前記保持状態を切り替える保持切替手段31と、を具備する。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
薬剤供給ユニット
【課題】 薬剤スティックを整列させる作業を必要とすることなく、確実に所定数だけ供給する。
【解決手段】 筒状で両端部を封止された袋内に薬剤を収容してなる薬剤スティック5が複数収納される薬剤収納容器3と、該薬剤収納容器3が着脱自在に装着され、前記薬剤スティック5を1つずつ供給する薬剤供給部4とを備える。前記薬剤供給部4を、前記薬剤スティック5を長手方向に搬送可能とする通路14を有する搬送手段10と、該搬送手段10によって搬送された薬剤スティック5を、その長手方向に直交する斜め下方に移動させる傾斜面11aを備えた薬剤供給容器11と、該薬剤供給容器11に回転駆動可能に配設され、前記傾斜面11aに従って移動した薬剤スティック5を外周部に形成した保持凹部22に保持して搬送するロータ12とを備えた構成とする。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
容器処理装置
【解決手段】 ラベラ1は、容器2を保持する複数の保持手段31を有する回転体3と、両ステーションA、Bに配置したラベル貼り付け機構4,5を備えている。
回転体3の隣接位置に第1受け渡し機構14を設けてあり、さらにその隣接位置に容器2を搬送する供給コンベヤ13とロボット15を設けている。
ロボット15は、供給コンベヤ13が搬送する横転状態の容器2を吸着保持してから正立状態に起立させ、その後、受け渡し領域Eにおいて第1受け渡し機構14の保持手段26へ受け渡す。
第1受け渡し機構14の保持手段26は、受け渡し領域Fにおいて容器2を正立状態のままで回転体3側の保持手段31へ受け渡す。
【効果】 自立できない容器2であってもキャリヤを用いることなく搬送して、ラベルを貼り付けることができる。
(もっと読む)
ガラス板のパレットへの積載方法および装置
【課題】パレットの床桟や背板の異なる傾斜角度や、製作誤差、ばらつきに追従してフラットで矩形状のガラス板を背板に密着するように積載させる。
【解決手段】多関節ロボットのハンドに垂直姿勢で設けた主プレートに、水平垂直両方向に複数個の吸着パッドを並設した吸着手段と、該吸着パッドで吸着保持したガラス板を空パレットの傾斜した背板に押し付けた時にオンとなるセンサと、該センサのオンオフによってパレットの背板の傾斜角度を測定する背板角度測定手段と、前記主プレート上にパレットの床桟上面と当接自在な昇降部材を昇降自在に設けた床桟高さ測定手段と、からなり背板角度測定手段によって測定したパレットの背板の角度にハンドの角度を追従し、床桟角度測定手段によって測定したパレットの床桟の傾斜角度にハンドの高さを追従して、2枚目以降のガラス板の厚み分積載位置を補正してパレット上にガラス板を積載する。
(もっと読む)
把持機器を用いて房から一度に1つの個別の毛髪/繊維を除去するための装置
対向する第1及び第2把持要素(5,6)を有する把持機器(4)を用いて、房(3)から一度に1つの個別の毛髪/繊維(2)を除去するための装置(1)。第1及び第2把持要素(5,6)は互いに関して相対的に移動可能であり、第1把持要素(5)は第2把持要素(6)の方を向いたくさび形の溝(7)を有し、また第2把持要素(6)は本質的に平坦な押圧受け領域(8)を有し、その際、第1把持要素(5)はくさび形の溝(7)側で先細になっている(テーパA)。  (もっと読む)
(もっと読む)
PTPシート製品・添付文書集積装置
【課題】単位時間当たりの処理数を向上させ、しかもそれに比例して設備床面積が増加しないように複数台の集積装置を回転する円板状に放射状に配設し、各作業を円板一回転中に順次実行させるPTPシート製品・添付文書集積装置を提供すること
【解決手段】複数の製品文書集積機構部10を回転する円形基板状に搭載したPTPシート製品・添付文書集積装置100であって、製品文書集積機構部10は、PTPシートを複数枚積重ねてバンド掛けしたバンド掛け品からなる製品1を、その添付文書2の一端の略半分の上に積重ねて、その製品1を両側から把持する2枚のスライド板13a、13bと、その製品1の所定外側面に添付文書2をU字形に曲げて(折り目をつけずに曲げて)捲付け、製品を把持している製品側アーム11と、その添付文書2の他端を載せた文書側アーム12とから少なくとも構成される。
(もっと読む)
条材搬入設備
【課題】長尺の山形鋼等の条材を、ランダムに載せても、後工程に支障なく送れる搬入装置を提供する。
【解決手段】第1コンベヤ4と第2コンベヤ5と移載機3とからなり、第1コンベヤ4は、条材Wを受入れて横送りし、第2コンベヤ5に送り込むコンベヤであり、第2コンベヤ5は、第1コンベヤ4から送り込まれた条材Wを出側まで横送りし、出側で停止させるコンベヤであり、移載機3は、第2コンベヤ5の吊上げ位置にある条材Wを1本づつ吊上げて、次工程用コンベヤに移し替えるものである。第2コンベヤ5から条材Wを移載機3により次工程に載せ替えている間に、第1コンベヤ4は条材Wの受入れに使えるので、第1コンベヤ4はバッファコンベヤとして使える。このため、第1コンベヤ4にはランダムな積込みが可能であり、積込みに要する手間と時間を減少させることができる。
(もっと読む)
ガラス基板の移積装置及び移載方法
【課題】 スペーサをガラス基板から分離させる際に、ガラス基板の表面と摺接させることなく確実に分離し、分離・搬送動作中のスペーサの皺やたるみの発生や、摺接によるガラス基板への傷の発生を防止することができるガラス基板の移載装置を、簡易な構成でコンパクト・安価に提供する。
【解決手段】 基板搬送手段10と、スペーサ分離搬送手段20,30,40とを備え、スペーサ分離搬送手段20,30,40は、基板搬送手段10がガラス基板Gを吸着する際には、スペーサSの一辺を固定すると共に、スペーサSを分離搬送する際には、該固定辺を中心とした円軌道を描くようにスペーサSを回転させて、該スペーサSを次のガラス基板Gの表面と摺接させずに該ガラス基板Gと分離して搬送することを特徴とする。
(もっと読む)
商品の自動段積包装装置
【課題】 高速化と装置の簡素化を図った自動段積包装装置を提供する。
【解決手段】 商品Gを一列に搬送する搬送路1の先端部の一方側に直交させて一段列幅の商品集積路3,4が複数設けられ、他方側には前記複数の商品集積路3,4のそれぞれの列数に対応させて前記一列に搬送された商品Gを前記それぞれの列に順次均等に供給する殴打杆5〜10が設けられ、前記複数の商品集積路3,4の先端部に直交させて包装資材Pの搬送路16が設けられ、前記複数の商品集積路3,4上方には該商品集積路3,4の先端に位置した一段分の商品Gを吸着、移送及び吸着解除して前記包装資材P中に充填する商品充填装置24がそれぞれ設けられてなる。
(もっと読む)
81 - 100 / 110
[ Back to top ]