
Fターム[3F072GA10]の内容
Fターム[3F072GA10]に分類される特許
21 - 40 / 110
電気抵抗溶接機の部品供給装置
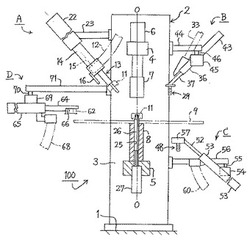
【課題】複数種類の部品供給装置を一対の電極に対して装着することを最小のスペースで実現する
【解決手段】電極軸線O−O上に配置された可動電極7と固定電極8が溶接装置の支柱2の前面3から離隔した箇所に配置され、複数種類の部品を可動電極7または固定電極8に供給する複数の部品供給装置A、B、CおよびDが、支柱2または突出部材4、5に取り付けた支持部材23、44、56、71を介して支柱2の前面3を含む仮想平面から離隔した空間に配置してある。こうすることにより、支柱2の横側のスペースを有効に活用し、各供給装置の配置スペースも小さくすることができる。
(もっと読む)
ワーク受渡装置及びワーク受渡方法

【課題】ワークの形状等により整列して隣接するワーク同士が係合あるいは付着していても、ワークを一つずつ分けて受け渡すことができるワーク受渡装置及びワーク受渡方法を提供すること。
【解決手段】ワーク受渡装置1は、整列装置100の整列路から送り出す先頭のワークWを載置する昇降載置面11を有する昇降架台10と、昇降載置面11に隣接して、整列路面101の高さと異ならせた高さに設けられ搬送装置200にワークを受け渡す受渡載置面21を有する受渡載置台20と、昇降架台10の昇降載置面11を整列路面101と受渡載置面21との高さ位置に昇降駆動させる昇降駆動手段40と、受渡載置面21に対向して設置した支持ブロック30と、支持ブロック又は受渡載置台のいずれか一方に吸引開口31を形成して昇降載置面11のワークを吸引して受渡載置面21に受け渡す吸引機構50と、を備える構成とした。
(もっと読む)
搬送装置、チャック並びに搬送方法
【課題】整列配置の精度が高い、搬送装置、搬送装置に用いられるチャック、並びに搬送方法を提供する。
【解決手段】搬送装置1は、整列搬送機1Aと、チャック1Bとを備える。チャック1Bは、整列搬送機1Aから搬出される処理済みのタコ25が載せられるベルトコンベア19の上方に位置する。長手方向スライド部材29に沿ってスライド可能な横方向スライド部材30が、長手方向スライド部材29に取付けられており、横方向スライド部材30にチャック1Bが取付けられている。長手方向スライド部材29や横方向スライド部材30によってチャック1Bが、撮影画像で把握されたタコ25の位置に移動する。チャック1Bは、閉じた場合に先端がチャック1Bの中心軸線上に位置するよう湾曲した3本の把持爪31を有しており、タコ25の位置に移動してきたチャック1Bは、この把持爪31を閉じてタコ25を把持する。
(もっと読む)
軸体処理装置
【課題】 軸体を凹部に適切に収納することの可能な軸体処理装置を提供する。
【手段】 軸体保持円盤42の進行方向側にあるガイド部材34bの先端部には、回転手段である回転体48が設けられている。回転体48により、ネジ32を凹部44の奥側に向けて押し出すようにしているので、ネジ32を凹部44に適正に収納できる確率を高くすることができる。また、仮に、ネジ32が凹部44に正しく収納されなかった場合には、再び、回転体48がネジ32の本体部32bに接して、ネジ32を凹部44の奥側に押しやり、正しい位置に収納することが可能となる。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
部品搬送装置
【課題】回転式の部品搬送装置において、簡潔な構造を採用しながらも、回転軸方向の移動ストロークを増大させる。
【解決手段】部品搬送装置1において、回転するベース部材30に対して保持部42を自転軸方向に往復移動自在に周方向に複数配置する。更に前記固定部材100側には、保持部42と係合して自転軸方向に移動させる案内機構120を配置する。ベース部材30の回転に連動して受入領域から搬出領域に搬送される際に、案内機構120によって電子部品を上下動させる。
(もっと読む)
食品類の搬送方法及びその搬送装置
【課題】食品の製造工程において最終醗酵工程と焼成工程とを食品生地類を載置した展板に振動を与えずに、旋回し移載する食品類の搬送方法及びその搬送装置を提供する。
【解決手段】コンベヤ装置1は、パン製造工程の最終醗酵工程と焼成工程とを結ぶ搬送経路を、複数台の直線状の搬送コンベヤK1とカーブ状の搬送コンベヤとで構成し、接続部に、展板2の底面を接触または非接触で吸着保持し、展板2に上下の振動を与ずに先の搬送コンベヤから後の搬送コンベヤに移載する移載搬送手段8を設ける。搬送コンベヤに並列なコンベヤベルト4a,4bの間には、展板2の底面を接触または非接触で搬送コンベヤの上面と水平に保持する複数個の吸着保持手段15を表面に設けた昇降かつ旋回可能な円形状のターンテーブル16を設置し、このターンテーブル16の裏面側中心部に設けた支持軸をスライド搬送手段18上に立設する。
(もっと読む)
容器用キャップの検査装置
【課題】検査用スターホイールから排出される際に先行するキャップと後続のキャップとの間に定間隔を維持しつつ排出することができ、この定間隔を維持した状態で、キャップを直線搬送している間にキャップを検査することができる容器用キャップの検査装置を提供することを目的とする。
【解決手段】複数の容器用キャップ1を複数のポケット5aで支持して所定の円形軌道上を搬送する検査用スターホイール5と、検査用スターホイール5によって搬送される容器用キャップ1を照明とカメラとにより撮像する第1の検査ステーションと、検査用スターホイール5から検査用キャップを受け取って容器用キャップ1を真空吸着して直線経路上を搬送するバキュームコンベヤ10と、バキュームコンベヤ10によって搬送される容器用キャップ1を照明とカメラとにより撮像する第2の検査ステーションとを備えた。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
物品搬送装置
【課題】コンベヤにおける各仕切り部材の間に搬入された物品が跳ね返って収容区画外に飛び出してしまうことがなく、物品を各仕切り部材の間に確実に収容して搬送し得る物品搬送装置を提供する。
【解決手段】搬送コンベヤ1の歯付ベルト10に設けた仕切り部材11は、先端部において搬送方向前方に向けて張り出す第1案内部11bを備えており、収容区画へ搬入された物品Wの前端が、各仕切り部材11間の収容区画の底部16に到るまでに、仕切り部材11を前進移動して第1案内部11bで物品Wの重心Wpより後方を歯付ベルト10の走行方向前方へ押して物品Wの前方を仕切り部材11の移動方向後方に向けて傾動させる。
(もっと読む)
ワーク搬送装置
【課題】リニアフィーダ6から分離供給部7を介してワーク収納孔3内に供給されるワークWの姿勢を容易に修正してこのワークWを搬送すること。
【解決手段】ワーク搬送装置はテーブルベース1と、テーブルベース1上に回転自在に配置された搬送テーブル2と、搬送テーブル2のワーク収納孔3内にワークWを供給するリニアフィーダ6とを備え、リニアフィーダ6と搬送テーブル2との間に分離供給部7が設けられている。リニアフィーダ6および分離供給部7の上面は、各々フィーダカバー6xおよび供給部カバー7xにより覆われている。分離供給部7内に位置するワーク収納孔3以外のワーク収納孔3の上面はテーブルカバー5により覆われている。テーブルカバー5のうち、供給部カバー7xに隣接する部分に、天井高さが徐々に低くなるテーパ部5bが設けられている。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
パッケージの個別切り出し装置
【課題】パッケージを確実に切り出し一個ずつカップ内に投入する個別切り出し装置を提供する。
【解決手段】ドラム回転駆動部13を介して回転駆動される吸着回転ドラム14と、回転ドラムの円筒内周面に沿って仕切られパッケージを個別に収納するパッケージ収納部14bと、回転ドラムの外周曲面14eを貫通して設けられパッケージ収納部に収納されたパッケージを吸着保持する貫通孔14cと、回転ドラムを所定角度範囲で覆うように回転ドラムの外周曲面に沿って対向して配置されパッケージ収納部内を吸引する吸着チャンバー15と、パッケージ収納部に配設され回転ドラムから落下するパッケージを排出する排出機構23と、を備え、回転ドラムの外周曲面に対向して配置される吸着チャンバーとの間隙18aを囲むように擦動部18を設けるとともに、吸着チャンバー内の圧力を測定する圧力センサ19を吸着チャンバーに設け、吸着チャンバーの吸引力を調整する吸引力調整部を設けている。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
仕分装置
【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更を行って搬出することができ、大量の被搬送物を短い間隔で連続的に姿勢や位置の変更することで作業効率を向上できる仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与えるターンテーブル121によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、駆動制御機構130が、ボールコンベヤ110とターンテーブル121とをそれぞれ独立して同時に駆動制御可能であること。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
透明物品の外観検査装置および外観検査方法
【課題】透明物品に対して、透過照明を用いた高精度な外観検査を、検査漏れを可及的に低減しつつ行う。
【解決手段】外観検査装置は、ガラス管Gの外観検査が行われる第1回転盤1と第2回転盤2のそれぞれの回転軸X1,X2が互いに同一平面上で略直交するとともに、第1回転盤1の外周面に吸着保持されたガラス管Gの移動経路(L1)と第2回転盤2の外周面に吸着保持されたガラス管Gの移動経路(L2)とが、ガラス管Gの受渡位置で重複し、この重複部で第1回転盤1と第2回転盤2のそれぞれの外周面の吸着部14,24の指向方向が互いに略直交する構成とされている。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
21 - 40 / 110
[ Back to top ]