
Fターム[3F072GA10]の内容
Fターム[3F072GA10]に分類される特許
41 - 60 / 110
小袋投入装置
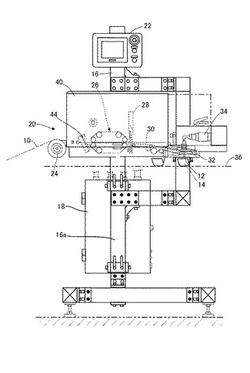
【課題】搬送コンベアと投入先とを離隔して製品への異物混入が防止でき、デッドスペースが少なく、連包パウチのカット位置が安定して傾きのない安定したカットラインが得られる、小袋投入装置を提供する。
【解決手段】小袋投入装置の搬送ライン20において、第1の搬送コンベア26で連包パウチ10を搬送部材26u・26dで上・下から挟み込んで水平方向に間欠的に搬送しる、前記カッター部28で、前記第1の搬送コンベア26によって搬送された連包パウチ10を搬送一時停止時に横シール部10aを切断して個々の小袋12に分け、第2の搬送コンベア30で、切断された各小袋12を載置して搬送し、吸着ユニット34で、前記載置台32上の小袋12を先端の吸引パッド34cで吸引して、前記搬送ライン20に平行かつ下方に位置し容器投入ライン36上を搬送される容器14内に投入する。
(もっと読む)
物品搬送装置

【課題】チップ状電子部品の搬送経路に関連して、チップ状電子部品の存在または通過を検知するための光透過型センサが設けられるとき、光透過型センサの投光部および受光部の少なくとも一方が埋め込まれる搬送面に穴が形成されることになるが、この穴のために、チップ状電子部品の円滑な搬送が阻害されることがある。
【解決手段】搬送面21を、セラミック板31によって与えるようにし、投光部23からの光は、セラミック板31を透過して受光部24へと至るようにする。搬送経路は、第1のベース18によって支持された第1の搬送経路9と、第1の搬送経路9に続くものであって、第1のベース18とは別の第2のベース19によって支持された第2の搬送経路14とを備え、セラミック板31は、第1および第2のベース18,19間にわたって連続して延びている。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
物品検査装置
【解決手段】 物品検査装置1は、外周面に設けた複数の吸着孔Hに物品2を吸着させる第1〜第6ドラムD1〜D6と、第1、第2ドラムに吸着された物品の良否を検査する検査手段としてのカメラ5a,5bとを備えている。
第2ドラムには、上記回転方向に複数の吸着孔を整列させた吸着レーンLが10列設けられており、そのうち2列の吸着レーンは物品2を分類するための分類レーンLbとなっており、その他8列の吸着レーンは第3ドラムに物品2を受け渡すための搬送レーンLaとなっている。
上記分類レーンの物品は検査結果に従って分類され、また第3ドラムは第2ドラムの搬送レーンと同数の8列の吸着レーンを有しており、第2ドラムの搬送レーンから物品を受け取るようになっている。
【効果】 処理能力が高く、また構成が簡易な物品検査装置1を提供する。
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
物品保持装置
【課題】物品10を保持する複数のグリップ部材26の相互の間隔を、簡単な構造で拡縮する。
【解決手段】ロボットハンド4に取り付けられるベース部材20に、5本のエアシリンダ22を一列に固定する。一端の第1エアシリンダ22Aは、ベース部材に直角に、その次の第2エアシリンダ22Bから第5エアシリンダ22Eまでを順次傾斜角度が大きくなるように傾斜させて固定する。全てのエアシリンダを収縮させてグリップ部材を上昇させた位置から、第5エアシリンダ22Eを伸張させて第5グリップ部材26Eを下降させて物品を保持した後、上昇させ、第4ないし第1グリップ部材26D〜26Aも順次下降、物品の保持、上昇をさせる。その後、一斉にエアシリンダ22を伸張させてグリップ部材26を下降させ、物品10の相互の間隔を接近させた後バケット14内に挿入する。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
被検物の画像検査方法および画像検査装置
【課題】被検物を搬送しながら外観などの画像検査を行う被検物の画像検査方法にあって、被検物を様々な方向から広範囲に亘って確実に検査できる画像検査方法を提供する。
【解決手段】本発明に係る画像検査方法は、水平回転する第1の回転体1の外周面mにおいて側方に臨むように形成された第1の吸着孔11に、単一の被検物bの第1の部位b1を吸着させて搬送し、第1の画像検査手段12により画像検査を行った後、水平回転する第2の回転体2の周縁部nにおいて上方に臨むように形成された第2の吸着孔21に、被検物bの第1の部位b1と異なる第2の部位b2を吸着させて受け渡し、第2の吸着孔21に吸着させて搬送し、第2の画像検査手段22により画像検査を行うものである。
(もっと読む)
ターンテーブル装置
【課題】搬送装置とターンテーブルの駆動源を同一にして製造コストを低減することができ、さらに配線数を減らして設置費用を低減することができるターンテーブル装置を提供する。
【解決手段】ターンテーブル装置10は、チェーンコンベア11と、搬送用モータ17と、ターンテーブル40と、リフタ30と、搬送用モータ17の駆動力によって回転するシャフト20と、シャフト20の回転が伝達されて回転するとともに連結板41の上方に配置された回転体27と、を備える。回転体27は、リフタ30の上昇により連結板41に動力伝達可能に連結可能な位置であり、かつ回転体27の回転が連結板41の回転として伝達される位置に配置されている。そして、搬送用モータ17の駆動力がシャフト20及び回転体27を介して連結板41の回転として伝達され、連結板41の回転と共に天板43が回転するように構成されている。
(もっと読む)
格納式搬送ホイールを備えるコンテナ製造装置
コンテナ送風器ユニットが配置される第1のエンクロージャーと、これと隣接してコンテナを充填する充填ユニットが配置される無菌の第2のエンクロージャーとで構成され、共通開口を通してコンテナを搬送する搬送装置と、充填ユニットを浄化する際に第2のエンクロージャーを隔離し、開口を遮断する遮断手段とで構成されるコンテナ製造装置である。 (もっと読む)
軸体搬送装置とそれを用いた軸体大径部の外径検査装置
【課題】外周に切欠き溝を設けた回転テーブルを用いて軸体の搬送を行う搬送装置で問題となっていた投・受光部或いはそれに変わる投光部とカメラのスペース面での設置規制をなくし、光学的外径測定装置を用いて軸体の大径部の寸法測定や外径の良否判定を行えるようにすることを課題としている。
【解決手段】外周の切欠き溝4に軸体Aの軸部a1を適合して受け入れ、大径部a2を下から支えて軸体Aを搬送する回転テーブル2と外周の固定ガイド3にスリット9,10を設け、そのスリット9,10が、外径測定部7に切欠き溝4が到達したときに平面視においてその切欠き溝4に導入された軸体Aの大径部a2を間に挟んで切欠き溝中心Cを通る直線上で対向し、このスリットに光学的外径測定装置の測定光や照明光を縦向きに通せるようにした。
(もっと読む)
容器の搬送装置及びこれを用いた充填装置
【課題】予め設定した特定のポケットから容器の供給を開始することが可能な容器の搬送装置を提供する。
【解決手段】スターホイール式搬送装置10と、その搬送装置10のスターホイール11のポケット12が所定の供給位置Psにあるときにそのポケット12に飲料缶Cを供給すべくスターホイール11と同期して動作する供給装置20とを備えた容器の搬送装置において、供給装置20への飲料缶Cの搬入を許可する許可状態及び供給装置20への飲料缶Cの搬入を禁止する禁止状態に切り替え可能なストッパ30を備え、搬送装置10への飲料缶Cの供給を開始する場合、予め設定した供給対象ポケットが供給位置Psに到達するポケット到達時期が推定され、その後ストッパ30を許可状態に切り替えた後にストッパ30を最初に通過した飲料缶Cが推定したポケット到達時期に供給位置Psに到達するようにストッパ30を許可状態に切り替える時期が制御される。
(もっと読む)
空圧作動式領域真空グリッパー
【課題】大面積の物体をより効率よく吸引するための領域真空グリッパーを提供する。
【解決手段】ワーク上に配置される穴20の開いた吸込み壁18を有する吸込み室16と、連結部および排気口40を有するエジェクターノズル28であって、連結部を介して吸込み室16に連結される、エジェクターノズル28と、を備える。エジェクターノズル28の排気口40が外部42または排気ダクト内に開口しており、エジェクターノズル28の吸気口38が吸込み室16内に開口しており、それによって、吸込み室16から流入する連結部における気流の方向をエジェクターノズル28における主送気の方向と一致する領域真空グリッパー。
(もっと読む)
作業台設備
【課題】間欠回転が可能な回転テーブルを備えた作業台設備において、連続した単一の作業空間で、作業者が複数の作業を一人で行うことができる作業効率を向上させた作業台設備を提供する。
【解決手段】本発明の作業台設備Aは、回転テーブル1の上側周方向に沿って複数の容器保持部2(S1〜S11)が間欠停止可能位置(P1〜P11)に対応して設けられ、所定数の間欠停止可能位置を通過させて特定回の間欠停止可能位置ごとに間欠停止することにより、回転テーブル1の外周において、作業者Wが作業を行うことができる連続した単一の作業空間WKが形成されているものである。
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
ネジの検査装置
【課題】ネジの首部のネジ山を正確に検査しながら、回転円筒のネジの吊り下げ片を十分な強度として、変形などの弊害を確実に防止する。
【解決手段】ネジの検査装置は、ネジ1の雄ネジ部1Bを案内してネジ頭1Aを上面に引っかけて移送するスリット3を所定の間隔で設けている回転円筒2と、回転円筒2を回転させる回転機構10と、回転円筒2のスリット3にネジ1を供給する供給機構4と、回転円筒2で移送されるネジ1を検査する検査機構6とを備える。検査機構6は、光源7とカメラ8と演算検査器9とを備える。検査装置は、光源7の光をスリット3に透過させてカメラ8で受光し、カメラ8から出力される映像信号を演算検査器9で演算処理してネジ1を検査する。回転円筒2は、スリット上端の両側に一対の吊り下げ片20を一体構造に設けている。一対の吊り下げ片20は、その内面を、上端に向かってスリット幅を狭くするように傾斜または湾曲している。
(もっと読む)
搬送装置
【課題】電力消費量を抑えて、省電力を実現することが可能な搬送装置を提供する。
【解決手段】商品処理システム1における箱詰部6は、搬入コンベア53と、アーム部材と、制御システムとを備えている。搬入コンベア53は、商品Xを搬送する。アーム部材は、商品Xを吸引して保持するためのブロアを有し、所定の経路を移動可能に配置されている。制御システムは、搬入センサ22からの受信信号を受信してから第1所定時間が経過した時に、搬入コンベア53を停止させるように制御し、第2所定時間が経過した時に、ブロアを停止させるように制御している。
(もっと読む)
搬送装置
【課題】部品を予め整列させなくても、搬送途中にサイクルタイムを悪化させることなく部品の姿勢を整えることが可能な搬送装置を提供する。
【解決手段】搬送装置1は、回転するベース部材30と、ベース部材30に対して周方向に沿って自転自在に複数配設されて部品を保持する保持部42と、ベース部材30に配設されて保持部42を自転駆動する保持部自転駆動手段43と、保持部自転駆動手段43を制御する保持部自転制御装置92と、を備え、受入領域12において保持部42に保持された部品が、ベース部材30の回転に伴って受入領域12から搬出領域13に搬送されると共に、保持部42の自転に伴って姿勢が整えられる。
(もっと読む)
容器のチャック機構及びこれを備えたスターホイール装置
【課題】容器を適切な力で把持することが可能でかつ小型軽量化に有利なチャック機構、を提供することを目的とする。
【解決手段】チャック機構20には、第1回転軸31の軸線を中心として回転可能な第1アーム21と、第1回転軸31と平行な第2回転軸32の軸線を中心として回転可能な第2アーム22と、爪部25、26が閉じる方向にアーム21、22を駆動する捩りコイルばね38とを設ける。第1アーム21には、第1回転軸31の後方に向かって操作レバー50を設け、レバー50には爪部25が開く方向に第1アーム21を回転させる駆動力の入力部としてカムフォロア52を設けるとともに、その駆動力を第2アーム22に伝達して爪部26が開く方向にアーム22を回転させる伝達ローラ63とを設ける。第2アーム22には、ばね38の力で伝達ローラ63に押し付けられる突起部65を設ける。
(もっと読む)
ロータリー式容器処理装置
【課題】容器台32の回転によって、容器4とともに回転するトップロケータ44の回転に異常があった場合にこれを検出する。
【解決手段】容器4を載せてその底面を支持する容器台32とこの容器台32の上方に昇降可能に配置されたトップロケータ44と、容器台32を回転させるサーボモータ38とを備えており、トップロケータ44の下端に設けた回転自在な容器支持部60と容器台32とにより容器4を挟持した状態で容器4を回転させる。トップロケータ44の方向を向けた近接センサ72により、容器支持部60に設けた検出片74を検出し、所定時間内の検出回数を判定手段である制御装置76に送って、正常な回転をしているか否かを判定する。
(もっと読む)
41 - 60 / 110
[ Back to top ]