
Fターム[3F072JA06]の内容
特殊移送 (6,503) | 物品の姿勢 (310) | 旋回するもの(垂直軸まわり) (145) | 90° (23)
Fターム[3F072JA06]に分類される特許
1 - 20 / 23
搬送装置

【課題】被搬送物を複数の搬送路に分岐又は複数の搬送路から合流させながら搬送する搬送装置であっても、迅速に被搬送物を搬送することができる搬送装置を提供すること。
【解決手段】旋回テーブル2を旋回動作及び昇降動作を同期して行うようにした上段旋回テーブル21及び下段旋回テーブル22で構成し、上段旋回テーブル21及び下段旋回テーブル22が下降した第1旋回位置T1にあるときに、上段旋回テーブル21と第1の搬送路11、下段旋回テーブル22と第2の搬送路12がそれぞれ接続され、上段旋回テーブル21及び下段旋回テーブル22が上昇した第2旋回位置T2にあるときに、上段旋回テーブル21と第3の搬送路13、下段旋回テーブル22と第1の搬送路11がそれぞれ接続されるようにする。
(もっと読む)
仕分装置

【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更を行って搬出することができ、大量の被搬送物を短い間隔で連続的に姿勢や位置の変更することで作業効率を向上できる仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与えるターンテーブル121によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、駆動制御機構130が、ボールコンベヤ110とターンテーブル121とをそれぞれ独立して同時に駆動制御可能であること。
(もっと読む)
移送装置及び搬送システム
【課題】構造が簡単で搬送システムのコンパクト化に寄与する移送装置及びこれを備えたコンパクトな搬送システムを提供する。
【解決手段】移送装置18は、第1搬送コンベア14及び第2搬送コンベア16におけるこれらが小さい角をなす側の領域に位置する中心軸20の周りに回転して被搬送物12を回転駆動可能であり、且つ、中心軸20の側への動きを規制する内側回転ガイド部22と、被搬送物12の中心軸20の周りの回転の軌跡の最外周に沿う曲線である曲線部24を有し被搬送物12の中心軸20と反対の側への動きを規制し被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ案内する外側ガイド部26と、を含み、被搬送物12を被搬送物12の下面に接する部材に対して滑らせて被搬送物12の方向を連続的に変化させつつ被搬送物12を第1搬送コンベア14から第2搬送コンベア16へ移送可能である。
(もっと読む)
被搬送物の転写装置
【課題】被搬送物の表面に凹凸があっても、該被搬送物を安定して保持ヘッドに転写することができ、更に該被搬送物を他の部材に転写することができる装置を提供すること。
【解決手段】凹凸表面を有する被搬送物3を、保持ヘッド15の保持表面15aに転写して吸引保持し、更に他の部材17a等に転写する被搬送物の転写装置10である。保持ヘッド15の保持表面15aが、被搬送物3の凹凸表面と相補形状をなす凹凸形状となっている。被搬送物3の凹凸表面が段差を有しており、保持表面15aのうち、該段差が変化する部位に対応する部位の近傍に、吸引孔が設けられていることが好適である。
(もっと読む)
マルチセグメントフィルタの製造プロセスにおけるフィルタセグメントの安全移送方法
マルチセグメントフィルタの製造にあたり、適正に調製されたセグメント(1)を、送り出しゾーン(2)を通って分離ユニット(5)を備えた分離ゾーン(4)に移送し、次に、軸線(10)に取り付けられていて移送ユニット(11)を構成する回転円板(9)のドライバ(8)相互で移送し、中断ユニット(T)で移送ユニット(11.)により中断し、中断ユニット(T)においてセグメントを個々に、移送ゾーン(12)を通って配置ゾーン(4)に移送し、配置ゾーン(4)においてセグメントをグループ分けベルト(13)の水平軌道上に位置決めし、いずれかのゾーン(2,4,7,12,14)内における且つ/或いはゾーン相互間におけるフィルタセグメント(1)の不正確な流れの場合、少なくとも1つのゾーン内におけるフィルタセグメントの移送を中断し、それによりフィルタ製造プロセスを停止する。不正確な流れの検出は、各ゾーン内におけるモータの駆動トルクをチェックすることにより各種機構体の動作に対する抵抗をチェックすることによって、或いは移送ユニット(11)及び/又は分離ユニット(5)内に固定された位置センサ(17)により各種機構体の位置の変化をチェックすることによって行なわれる。プロセスの中断は、フィルタセグメント(1)の流れ軌道からの移送ユニット(11)及び/又は分離ユニットの取り出しによって行われ、取り出しは、空気圧シリンダが移送ユニット(11)を移送ユニット(11)の回転軸線(10)に平行な軸線を備えたその案内(16)に沿って動かすことにより、或いは空気圧シリンダが移送ユニットを案内の軸線回りに回転させることにより行なわれる。案内に一緒に取り付けられた移送ユニット及び分離ユニットは、移送ユニットの回転軸線に垂直な軸線の案内に沿って動くことにより或いは移送ユニットの回転軸線に平行な案内の軸線回りに回転することにより取り出し可能である。 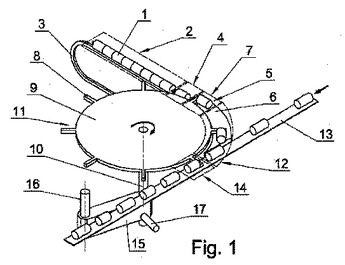 (もっと読む)
(もっと読む)
箱の搬送姿勢変更装置
【課題】搬送装置で搬送中の箱の長手方向の姿勢を同じ方向に変更する。
【解決手段】挟持アームで箱hを挟持しているときに回転テーブル20を下降してローラコンベア22と箱hの底面を乖離させた後に回転テーブルコンベア22の搬送姿勢を搬送コンベア2と交差する姿勢に変更するよう回転テーブル22を回転させ、回転テーブル20を上昇させて回転テーブルコンベア22と箱hの底面を当接させ、回転テーブルコンベア22を搬送コンベア2の搬送方向に沿う姿勢になるように回転テーブルを回転させて箱の搬送姿勢を変更して搬送コンベア2に供給する。
(もっと読む)
パレタイズされるべきパッケージの層を形成するためのシステムおよびパレチゼーションプラント
グリップヘッド(1)は、第1回転軸線(α)を中心に回転するように構成された支持要素(11)、例えば水平板を備え、前記支持要素により2つ以上のグリッパ(12)が枢動自在に結合され、各グリッパはその対称軸線(β)を中心に回転するように構成され、前記回転軸線は互いに平行であり、各グリッパの回転運動は互いに独立している。したがって、各グリッパはその対称軸線(β)を中心に回転し、かつそれらが枢動自在に結合された支持要素の回転軸線(α)を中心に旋回するように構成される。前記グリップヘッド(1)を備えた好ましいプラントは、ベルトコンベヤと、前記グリップヘッド(1)が枢動自在に結合された機械的肢部(2)とを含む。 (もっと読む)
ターンテーブル装置
【課題】搬送装置とターンテーブルの駆動源を同一にして製造コストを低減することができ、さらに配線数を減らして設置費用を低減することができるターンテーブル装置を提供する。
【解決手段】ターンテーブル装置10は、チェーンコンベア11と、搬送用モータ17と、ターンテーブル40と、リフタ30と、搬送用モータ17の駆動力によって回転するシャフト20と、シャフト20の回転が伝達されて回転するとともに連結板41の上方に配置された回転体27と、を備える。回転体27は、リフタ30の上昇により連結板41に動力伝達可能に連結可能な位置であり、かつ回転体27の回転が連結板41の回転として伝達される位置に配置されている。そして、搬送用モータ17の駆動力がシャフト20及び回転体27を介して連結板41の回転として伝達され、連結板41の回転と共に天板43が回転するように構成されている。
(もっと読む)
製品搬送ユニット
製品(2)、特にブリスタパック(2)を搬送するユニット(1)は、第1のコンベア(4)及び第2のコンベア(5)を備える。ユニット(1)は、第1のコンベア(4)と第2のコンベア(5)との間に、軸(K)を中心として回転作動可能であり、製品(2)の第1のコンベア(4)から第2のコンベア(5)への搬送及び第1の進行方向(A1)から第2の進行方向(A2)への方向変更を実行する円盤(6)を備えると共に、第2のコンベア(5)に向かって回転円盤(6)上で移送中の製品(2)を位置合わせし案内する、製品(2)の少なくとも線形案内進行区画(L1)を識別するように円盤(6)上に位置決め可能な、製品(2)の案内手段(8、80)をさらに備える。 (もっと読む)
ワーク整列集積装置
【課題】一つずつ移送されるワークを受け入れ一定個数毎に集積して取り出す、ワークの集積整列装置を提供する。
【解決手段】ワークの集積整列装置は、ワーク収容空間11を複数有するラック10と、ワーク収容空間11にワークWを収容する毎にラック10を一定ピッチで間欠送りするラック移動手段20と、ラック10に集積すべき数のワークWを収容した時点で、これらのワークWに水平バー31を通した状態になり、水平バー31を持ち上げてワークWを取り出すワーク取出手段30と、を備える。
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
搬送物品間のピッチを変更し、物品を回転させるデバイス
リピッチ動作を実行するデバイス、つまり、物品搬送の流れの中で物品(A)間のピッチを変更するデバイスであって、物品(A)のピックアップ位置(T)と解放位置(G)との間の主軸(X10)周りに軌道運動経路を画定する、物品(A)を搬送する少なくとも1つの搬送部材(12)と、1以上の搬送部材(12)の軌道運動経路を通るカムプロファイルを有し、物品(A)を主軸(X10)周りに搬送するカムフォーメーション(160)と、1以上の搬送部材(12)に保持され物品(A)を搬送する少なくとも1つのカムフォロワ部材(158)と、を備える。軌道運動の速度は、ピックアップ位置(T)と解放位置(G)との間の経路で選択的に可変であることで、ピックアップ位置(T)と解放位置(G)との間の経路で物品(A)間のピッチを変更する。1以上の搬送部材(12)はそれぞれの軸(X12)周りに同様に配向可能であり、主軸(X10)に対して半径方向に配向されることで、ピックアップ位置(T)と解放位置(G)との間の経路の物品(A)の配向を変更する。少なくとも1つのカムフォロワ部材(158)は、カムフォーメーション(160)とカムフォロワ関係で協働して、1以上の搬送部材(12)がピックアップ位置(T)と解放位置(G)との間でとる配向を、軌道運動の速度に関わらず決定する。 (もっと読む)
ワーク方向転換装置
【課題】方向転換時のワークの飛び出しを抑え、ワーク方向転換装置の信頼性を向上させる。
【解決手段】ワーク方向転換装置1は、鉛直方向に対して回転軸Xが搬入シュート2側と反対側に第1の角度で傾斜するとともに搬出シュート4側に第2の角度で傾斜し、ワーク3を受け取るとワーク3の重さによって搬入位置から搬出位置に回転する回転テーブル8と、回転テーブル8上の支点16に揺動可能に支持され、ワーク3を受け取らない状態では回転テーブル8と平行になり、ワーク3を受け取ってワーク3が支点16を越えるとワーク3の重さにより後縁部が下がって回転テーブル8に対して第2の角度よりも小さい第3の角度で傾斜するワーク受け部9と、を備える。
(もっと読む)
基板搬送方法及び基板搬送装置
【課題】ガラス基板をステージに載置するときの空気抵抗を低減させ、目標位置へ正確にガラス基板をセットすることを課題とする。
【解決手段】ガラス基板Pの一辺と平行な部位をガラス基板Pの最下部となるように下に凸に湾曲させ、走査ステージ49に向かって下降させる。ガラス基板Pの最下部をまず走査ステージ49の第1の吸引部14に吸着させ、次いでガラス基板Pの最下部に隣接する部位を走査ステージ上の第2の吸引部15に吸着させる。
(もっと読む)
容器から桿状体を配送する装置及び方法並びに後続の搬送装置
本発明は、容器(1)から桿状体(2)、すなわち配送口(3)を有するホッパーからペットボトル用加工材料(プリフォーム)を配送する装置であって、配送口(3)に回転する円板(5)が備えられていることを特徴としている。 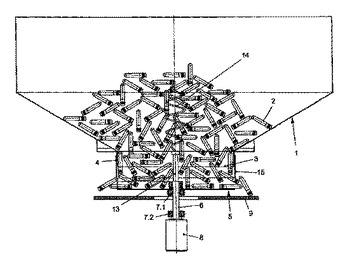 (もっと読む)
(もっと読む)
溶接工程に用いられるワーク搬送装置
【課題】次のワークを待機位置にて待機させておき、前のワークの溶接完了後、直ちに溶接作業位置へと送り出せるようにする。
【解決手段】2本の同心円状に配置された円環状トラック11、11’からなるものであって別個独立に回転駆動される二つのドリブン機構1、1’と、各ドリブン機構1、1’を形成する円環状トラック11、11’上に設置されるものであってワーク9の搭載されるパレット3、3’と、パレット3、3’の設置された各ドリブン機構1、1’を、それぞれ別個独立に駆動するものであって電動モータを主に形成される二つのドライブ機構2、2’と、各ドライブ機構2、2’の作動制御、各ドリブン機構1、1’を形成する円環状トラック11、11’上に設置されたパレット3、3’の各位置への位置決め及び各パレット3、3’の所定位置での傾動運動制御、及び溶接ロボット6の作動制御を行なう制御手段5と、からなる。
(もっと読む)
台車式搬送装置
【課題】床側のカムレールで制御される昇降自在な被搬送物支持台を備えた台車を利用する搬送装置において、当該台車の方向転換用ターンテーブルを低床構造にする。
【解決手段】昇降する被搬送物支持台と連動して上下動するカム従動ローラーが台車下に設けられた搬送台車1と、この搬送台車1の走行経路中の方向転換位置に設置されるターンテーブル7とを備え、搬送台車1の走行経路中には、前記被搬送物支持台が下降位置に保持されて走行する区間(高速走行区間3B)と、前記被搬送物支持台が上昇位置に保持されて走行する区間(作業区間3A)とが設けられている台車式搬送装置であって、前記ターンテーブル7上には、前記カム従動ローラーを押し上げて被搬送物支持台を上昇位置に保持するカムレール60Tが敷設され、搬送台車1が少なくとも前記ターンテーブル7上を通過するときは、前記被搬送物支持台が上昇位置に保持される構成。
(もっと読む)
充填装置
【課題】ビン、缶、プラスチックボトルなどの容器に液体ないし液状の内容物を充填するときに容器を保持するフィンガの開閉手段に特徴がある充填装置に関し、構造が簡単で安価に提供でき、開閉タイミングの調整も不要な容器保持装置を提供する。
【解決手段】テーブルに昇降自在に支持された昇降ロッドと、この昇降ロッドの昇降に伴って昇降する受台と、この受台の上方に配置された充填ノズルとを備え、昇降ロッドの上昇動作により容器に内容物を充填する充填装置において、容器受台に相対回動可能かつ軸方向相対移動不能に連結された昇降ロッドを備え、この昇降ロッドに固定されて閉方向に付勢されているフィンガと、昇降ロッドとテーブルとの間に介装されて当該昇降ロッドをその昇降動作に伴って往復回動させるカム装置とを備えている。このカム装置は、昇降ロッドをその下降動作によりフィンガの開方向に回動させる。
(もっと読む)
ワーク搬送装置、バックアップ機構およびワーク搬送システム
【課題】ワークが位置決め状態でワーク処理装置へ移載されるように、ワークを搬送する。
【解決手段】略方形の平面形状を有するワークWを搬送するベルトコンベア31と、ベルトコンベア31に臨むワーク処理装置への移載のために、ベルトコンベア31により搬送されてきたワークWを拾い上げるバックアップ機構32と、から成るワーク搬送装置21において、ベルトコンベア31は、ワークWを、その一部をはみ出させた状態で載置し且つこの状態で搬送する搬送ベルト41を備え、バックアップ機構32は、搬送ベルト41により搬送されてきたワークWのはみ出し部分Waが、搬送方向に対し左右略対称に突き当たる停止ストッパ51と、停止ストッパ51により停止したワークWを下方からリフトアップするワークステージ52と、ワークステージ52を昇降させる昇降機構53とを備えた。
(もっと読む)
ターンテーブル及びターンテーブルを含むローラコンベアを用いた搬送システムの制御方法
【課題】 ターンテーブルを含むローラコンベアを用いた搬送システムにおいて遮断された電源を再投入する際に、効率的に被搬送物の搬送を再開する。
【解決手段】 ドグ検出センサ3と補助ドグ検出センサ4とドグ5とからなる回転位置検出機構2により回転テーブル6の回転位置を検出して、フォトセンサ26によりローラ支持フレーム42上のキャリア23の存在を確認する(S1、2)。ローラ支持フレーム42上にキャリア23が存在する場合は、フォトセンサ26でキャリア23が所定の停止位置にあるか確認する(S3、4)。キャリア23が所定の停止位置に無い場合はキャリアを撤去してする(S4、5)。次に、回転テーブル6が所定の停止位置にあるか確認し(S6)、所定の停止位置に無い場合は回転テーブル6を正常位置にした後(S7)、回転テーブル6を目標位置に回転し、搬送システム1の電源を再投入する(S8、9)。
(もっと読む)
1 - 20 / 23
[ Back to top ]