
Fターム[3F072KA15]の内容
特殊移送 (6,503) | コンベア(その他) (423) | 無端(ベルト、チェーン)コンベア (296) | キャリヤ付コンベア (41)
Fターム[3F072KA15]の下位に属するFターム
起立状キャリヤ (4)
くし歯状キャリヤ (1)
対向支持型 (2)
スラット(板)状キャリヤ (4)
ローラキャリヤ(ローラチェーン等) (4)
キャリヤの一部が欠けているもの
キャリヤが傾動するもの (3)
Fターム[3F072KA15]に分類される特許
1 - 20 / 23
物品移載装置
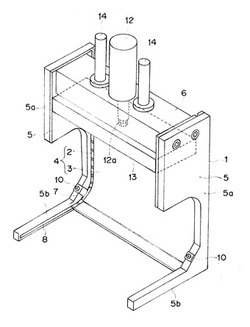
【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
容器処理装置

【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
物品移載装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
果菜自動選別装置
【課題】 果菜キャリア2から果菜引受け体4への乗り継ぎの際に果菜3が転がる。
【解決手段】 仕分排出部の果菜キャリア2と果菜引受け体4との間に、果菜キャリア2から排出される果菜3を同果菜キャリア2の進行方向から20度乃至70度の範囲内の斜方向に引出して果菜引受け体4へと送り出す斜め引出しコンベア6を設ける。
(もっと読む)
物品搬送装置
【課題】省スペースでランニングコストを低く抑えられ、高速で立体的な三次元搬送ができ、長ストロークを上下動できる物品搬送装置を提供する。
【解決手段】物品搬送装置の架台4にラック・ピニオン機構により前進又は後退する前後動部材50の基端部を固定し、前後動部材の先端部には、機械40との間でワークWを授受する上下動ローダを有する上下動部材60(Y)をスライドガイドを介して接続し、上下動部材は前後動部材を介して任意距離移動され、前工程の出口2の未加工のワークをキャリヤー10で上下動ローダの対向位置まで搬送し、キャリヤーと上下動ローダのチャックとのワーク受け渡し位置から上下動ローダを降下して、機械との間でワークを受け渡し、加工済みワークを上下動ローダにより上昇してキャリヤーに受け渡してから後工程の入口3へ搬送する。
(もっと読む)
パッケージング装置および物品の包装方法
物品を包装するためのシステムであって、当該システムは、アイテム(7)の第1の流れを形成するようアイテムを輸送するための第1のコンベア(6)と、アイテムの第2の流れを形成するようにアイテムを輸送するための第2のコンベア(23)と、二つの流れの一つ以上からのアイテムと係合すると共に、この二つの流れの一方から、この流れと実質的に交差する方向に、そのように係合させられたアイテムを移送することができ、かつ、これら二つの流れの少なくとも一方が連続的に動いている間に、この二つの流れの他方における隣接するポイントに、これらのアイテムを配置するための第1のツール(16)とを具備してなる。 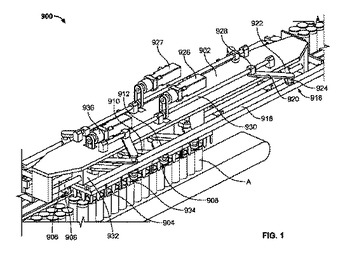 (もっと読む)
(もっと読む)
第1ユニットから第2ユニットへ包装容器を移送するための方法と配置
本発明は、包装ラインにおける2つのユニット間で運動パターンを同期させるための方法と移送装置とに関し、1つのユニットは断続的に作動され、第2のユニットは連続的に作動される。本発明は特に、断続的に作動される充填ユニットと、連続的に作動される箱詰め機との間の移送装置を対象としている。移送装置は、チューブ・ピッカー/プレーサー(28)を支持するために配置されたフレーム(13)が備えられ、第1シャフトと第2シャフト(16,31)を中心とする同時旋回運動を行うために配置されており、第2シャフト(31)に直角の第3シャフト(48)を中心として回転を行うためである。フレームはさらに、チューブ間の間隔を調節するための手段と、充填ユニットの部分的に円形のコンベヤから容器が取り上げられる場合、回転運動の間、垂直位置での相違を相殺するための手段とが備えられている。  (もっと読む)
(もっと読む)
長尺材の取出装置
【課題】綾となって絡まり合っている長尺材であっても確実に1本ずつ取り出すことができる長尺材の取出装置を提供する。
【解決手段】本発明の長尺材の取出装置10は、所定本数の長尺材Bを並列させた状態で載置可能な載置手段11と、前記載置手段11に載置された長尺材Bが並列方向の移動するのを規制する規制手段34と、前記載置手段11から長尺材Bを1本ずつ取り出す取出手段13と、を備える。載置手段11は、載置した各長尺材を自転させる載置台32を備える。
(もっと読む)
青果物選別装置
【課題】未選別のさくらんぼなど青果物を、人手に頼らずに、自動的、正確で、傷をつけることなく搬送部に供給できる、作業性を向上させた青果物選別装置を提供する。
【解決手段】未選別物を貯留する供給部3と、供給部3の未選別物を計測する測定部4と、測定部4の計測情報に基づいて未選別物を選別する選別部と、供給部3の未選別物を供給部3近傍から選別部まで搬送する搬送部2とを備え、供給部3の未選別物を吸着する供給部3の設定位置aと、吸着した未選別物を放出する搬送部2の設定位置bとの間を往復動する、吸着部を有する移送装置30を備える。吸着部は、供給部3の設定位置aと、搬送部2の設定位置bとで上下昇降かつ、上昇位置間で往復動し、未選別物を弾性的に支持するとともに、弾性変形可能であり、未選別物の載置部8aが、搬送部2の設定位置bに位置したことを検出する検出器を、搬送部2近傍に備える。
(もっと読む)
容器搬送装置
【課題】電子線殺菌装置に使用した場合に、電子線の照射位置で容器2を自転させる必要を無くし、処理能力を向上できるようにする。
【解決手段】両端にネックグリッパ4が取り付けられた主軸部材30に、その軸線と直交する方向を向けて固定連結部材32を固定し、その外周に回動可能に回動連結部材36を取り付け、一つの主軸部材30の固定連結部材32と隣接する主軸部材30の回動連結部材36とを、主軸部材30の軸線と直交する線を中心に回転できるように連結する。これを連続して無端状搬送体6を構成する。2つのスプロケット8、10および円弧状ガイド12、14と直線ガイド16、反転ガイド18で循環移動経路20を構成する。主軸部材30に設けた上下左右のローラ44、46、52、54を、反転ガイド18のカムレール18a、18b、18c、18dに係合させて反転させる。
(もっと読む)
ワーク搬送機構
【課題】ワーク(電子部品)に外力を加えることなく、ワークを供給位置に搬送することができるワーク搬送機構を提供する。
【解決手段】外周側に周方向に沿って所定ピッチでワーク保持手段を配置したターンテーブル11を備え、ターンテーブル11を回転させて各ワーク保持手段にて保持されている電子部品12を順次搬送するワーク搬送機構である。ワーク供給位置に供給すべき電子部品12がこのワーク供給位置に対して正規姿勢状態となる位置でターンテーブル11を停止する。
(もっと読む)
物品段積み装置
【課題】段積み数設定の自由度が大きく、物品を傷めることの少ない物品段積み装置を提供する。
【解決手段】物品段積み装置1は、第1群のバケット11aを第1駆動系統12aで、第2群のバケット11bを第2駆動系統12bで、独立して駆動可能な授受コンベア10を備える。物品搭載装置がバケット11a、11bに物品2を1個ずつ搭載する。第1群と第2群のいずれかのバケットに物品搭載装置が物品2を搭載している間、物品搭載済みの他群のバケットから移載装置40が物品2をピックアップし、段積み用コンベア50の第1群のバケット51aまたは第2群のバケット51bに積み上げる。制御装置は、物品搭載装置による物品2の搭載と、移載装置40による物品2のピックアップが円滑に進行するように第1駆動系統12aと第2駆動系統12bを制御する。
(もっと読む)
ワーク供給装置
【課題】ワークホルダー内に縦横に配置されたフリーズドライ処理したブロック状のワークを搬送コンベアなどに効率良く自動供給できる新規なワーク供給装置の提供。
【解決手段】ブロック状のワークWが縦横に配置されたワークホルダーH内の各ワークWをそれぞれ保持する複数のワーク保持手段33と、これら複数のワーク保持手段33を前記ワークホルダーHと前記搬送コンベアV間で往復移動させる往復移動手段Bと、前記複数のワーク保持手段33による各ワークWの保持動作と離反動作を前記往復移動手段Bの往復動作に基づいて制御する制御手段Cと、前記往復移動手段Bの往復動作に基づいて前記ワークホルダーHを前記ワーク保持手段33の取り出し位置側に順次移動させるワークホルダー移動手段Aとを備える。これによって、ワークホルダーH内に縦横に配置されたブロック状のワークWを搬送コンベアVなどに効率良く自動供給できる。
(もっと読む)
装荷回転式コンベヤを有する包装システム
包装システム(10)は、装荷回転式コンベヤ(60)の2つのサイドを利用し、該包装システムの高さおよび設置面積の両方を減少する。質量および慣性も減少し、より早い動作速度を可能とする。該装荷回転式コンベヤは、開放されたカートン(C)を第1のサイド(8)で受け取り、第2のサイド(9)の製品グループ(B)の上に、それらを下げる。  (もっと読む)
(もっと読む)
卵のひび割れ検出
卵を搬送する搬送装置が、搬送方向を横断して延びるローラを設けられているエンドレスコンベヤを備える。ローラは対で配置され、且つローラの各対は、卵が両方のローラ上に載るように収容される収容スペースを形成する。搬送装置は、卵をトレーからピックアップしてコンベヤ上に配置する複数のピックアップ要素を設けられている移送装置をさらに備える。移送装置上のピックアップ要素は、搬送方向で見た場合、トレー上の個々の卵間の距離に対応する距離に互いに離れて位置する第1の位置と、2つの収容スペースの中心間距離に対応する第2の位置との間を移動することができる。使用時に、ローラは回転状態にされ、その結果、当該ローラ上に載っている卵が回転状態にされ、これは、コンベヤ上の卵の亀裂を検査する必要がある場合に有利である。この場合、固定位置に順次配置される複数のレーザによって、レーザビームが卵の移動中に卵に向けられ、卵の表面の光透過率が光学的観察手段によって観察される。データ処理手段が、観察された光透過率に基づいて、卵が亀裂を有しているか否かを判定するように設けられる。 (もっと読む)
パレタイジング装置
【課題】
貫通孔の無いワークにおいても、一度に複数のワークをパレット内に積込むことが可能であり、かつ積込時におけるパレット内のワークの荷崩れを防止することを可能とするパレタイジング装置を提供する。
【解決手段】
プレス成形後にコンベア3から搬送されたワーク2をパレット40内に積込むパレタイジング装置において、ワーク2の底面が垂直な向きになる様にクランプし、複数の該ワーク2を整列させるワーク整列装置10と、該ワーク整列装置10に近設され、該ワーク整列装置10により整列された複数の該ワーク2の外周部を把持し専用パレット40内にワーク2を積込むワーク積込装置20と該ワーク積込装置20の近傍に配置され、該ワーク積込装置20から複数の該ワーク2が積込まれた際に該複数のワーク2が整列された状態で積載可能とする専用パレット40とを有する。
(もっと読む)
プラスチックボトル搬送装置
【課題】インラインボトル成形充填システムにおいて、成形直後のボトルをエア搬送路に受け渡す際にボトル同士が衝突して変形するのを防止する。
【解決手段】ブロー成形機からボトルを搬出するシステムは、回転式のボトル取り出し機によって各成形型から取り出されたボトル10がスターホイール18を介してネック式エア搬送路17に送り出される。ネック式エア搬送路17は、そのフレームFがスターホイール18と干渉しない位置に設置され、エア搬送路17の入口17aはフレームFからスターホイール18側に延長されて、上方から見たときにスターホイール18と干渉する位置までスターホイール18に接近して配置されている。
(もっと読む)
間欠動作する包装装置における製品の移送方法およびユニット
【課題】安価で容易に実施可能な間欠動作する包装装置を提供することである。
【解決手段】容器への包装装置(1)において、コンベア(13、19、25、39)上に設置されたポケット(12、22、28、42)は工程的に移送ステーション(51、55、57、59)に到達する。そこで、2つの連続する動作工程のあいだの停止期においてポケット(12、22、28、42)が移送ステーション(51、55、57、59)で捕捉されているあいだに、少なくとも1個の製品(3)を、同コンベア(13、19、25、39)上のポケット(12、22、28、42)から取り出すか同ポケットに取り込むかするほか、当該製品(3)が積み替えられる前、移送ステーション(51、55、57、59)に位置するポケット(12、22、28、42)に同コンベア(13、19、25、39)に対して動かし同ポケット(12、22、28、42)を所定の移送位置にする。
(もっと読む)
誤ってローディングされた容器を放出する手段を備えた搬送体に容器をローディングする装置
ネック部20を備えている容器12を、このネック部によって容器12を個別に把持する部材28を備える搬送体14に装填する装置に関し、上記把持部材は、プリフォームを捕捉またはリリースする動作中に、上記プリフォームの上記把持部材に対する垂直方向のスライドによって、プリフォームのネック部を捕捉またはリリースするのに用いられ、装填装置は、上記リリース動作中に、搬送体から容器を選択的に放出する手段42を備え、上記容器を放出する手段が、上記リリース動作の前に、容器を捉えるのに用いられ、かつ収容手段42の軌道が、把持部材28の軌道と垂直方向で重なり、かつ上記軌道と同期されるように水平方向に移動可能に設けられている容器の収容手段を備えている。 (もっと読む)
テーブルフィーダから漏れ出たバラ物の回収装置
【課題】 新たな装置を付加することなく、即ち構造簡単にして低コストで荷詰まりによるターンテーブルの回転不能を防止することができるテーブルフィーダから漏れ出たバラ物の回収装置を提供する。
【解決手段】 フレーム3に対し駆動手段24によって鉛直な旋回軸A回りに旋回されるバケットエレベータ6と、該バケットエレベータ6からバラ物5を受けて所定箇所(出口シュート27)に供給するテーブルフィーダ10と、該テーブルフィーダ10の下方に配置され、該テーブルフィーダ10から漏れ出たバラ物5を受ける荷受け部材28と、該荷受け部材28の上面に当接され、該荷受け部材28上のバラ物5を回収部29に掻き寄せるための掻き板30とを備え、荷受け部材28及び掻き板30のいずれか一方をフレーム3に取り付けると共に他方をバケットエレベータ6に取り付け、駆動手段24によるフレーム3に対するバケットエレベータ6の旋回駆動力を利用して、掻き板30と荷受け部材28とを相対的に移動させるようにした。
(もっと読む)
1 - 20 / 23
[ Back to top ]