
Fターム[3F072KD03]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | グリッパ付 (345) | 吸着式 (179)
Fターム[3F072KD03]の下位に属するFターム
Fターム[3F072KD03]に分類される特許
1 - 20 / 155
ワーク移載装置
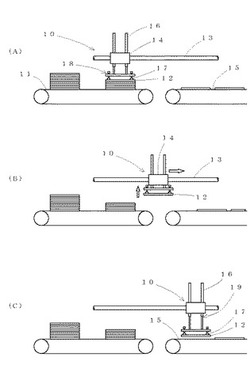
【課題】高さが変動する段積み状態のワークを順次吸着し移載することができる設定調整が簡単で、安価なワーク移載装置を提供する。
【解決手段】ワーク12を落下載置させるワーク移載装置10であって、吸着ヘッド下降当接停止機構18と、吸着ヘッド下降近接部停止機構19を有し、前記機構は、緩衝器20、支持板21、透過型センサを備え、これによる検知による信号で、エアシリンダ16の電磁弁23のソレノイドへの通電を止めるような機構からなると共に、後記機構は、エアシリンダ15に上昇端スイッチ24と、下降端スイッチ25を備え、この通電による停止と同時に吸引を解除する機構からなり、前記機構の作動中は、上昇端スイッチ24を起動させ下降端スイッチ25を停止し、後記機構の作動中は、上昇端及び下降端スイッチ24、25の通電を起動させワーク12を吸着すると共に、可動する所定位置に載置する。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
物品分類装置
【解決手段】 ストッカ7に載置された複数の分類トレイ6を、複数のトレイグループにグループ化し、さらに供給位置(排出ステーション13F)とストッカとの間に設けた中間ステージに上記ストッカの各トレイグループに対応する載置領域F1〜F5を設定する。
また中間ステージ4へと物品(LED素子1)を移載する第1移載手段5と、ストッカ7の所要の分類トレイ6へと物品を移載する第2移載手段8とを設けて、上記第1移載手段5が物品を中間ステージ4の所要の載置領域に移載すると、上記第2移載手段8は当該載置領域の複数の物品を保持して、上記ストッカ7の対応する分類トレイ6に移載する。
そして第2移載手段が物品をストッカの分類トレイに移載する間、上記第1移載手段は上記供給位置からの物品の取り出しを継続して行う。
【効果】 物品分類装置の稼働効率を高くすることが可能である。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】複数のカメラ3a,3bが、コンベアの搬送路上の異なる領域をそれぞれ撮像し、制御装置5が、カメラ3a,3bによって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、ワークの保持動作を、カメラ3a,3bによって撮像される領域ごとに対応付けられたロボット2a,2bに対して指示する。
(もっと読む)
選果システム
【課題】移送装置の吸着ノズル内にゴミが残留することによって吸着ノズルにおける青果物の吸着能力が低下することを防止することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着ノズル66の先端部で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイ8に詰める、選果システム1であって、移送装置60は、吸着ノズル66の先端部から空気を噴射可能に構成され、吸着ノズル66の先端部から空気を噴射することにより吸着ノズル66内のゴミを排出するように構成される。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
板状部材反転システム及びその反転移送方法
【課題】 高速で板状部材を反転させることができると共に上面を傷つけることなく板状部材を反転することができる板状部材反転システムを提供する。
【解決手段】 複数の板状部材を順次反転して移送する板状部材反転システムは、第2デルタロボット60と、反転装置61と、第2移送装置第2移送装置62とを備えている。第2デルタロボット60は、板状部材12を順次保持して反転装置61に移載するようになっている。反転装置61は、第2デルタロボット60により前記板状部材が水平姿勢で移載され、移載された前記板状部材12をその上面を開放した状態で吸着保持して板状部材12の上下面を反転させるようになっている。また、第2移送装置62は、反転装置61から反転された板状部材12を受取り、その板状部材12を反転された状態で且つ水平状態で移送するようになっている。
(もっと読む)
包装計量システム
【課題】包装計量システムの長さを抑えつつ、包装機から並列的に排出された複数の対象物を、後段の搬送部において直列的に搬送することが可能な技術を提案する。
【解決手段】包装機1は、包装後の複数の商品100を複数列に配列した状態でX軸方向に沿って並列的に排出する。包装機1から並列的に排出された複数列の商品100は載置部2に載置される。計量機3は、Y軸方向で載置部2と並んで配置された載置面3aを有し、当該載置面3aに載置された複数の商品100のそれぞれを個別に計量する。搬送部4は、載置された商品100をX軸方向に沿って搬送する。搬送ロボットは、載置部2に載置されている複数列の商品100を、列単位で順に計量機3の載置面3aまで移動するとともに、計量機3で計量された列単位の商品100を載置面3aから搬送部4まで移動する。
(もっと読む)
選果システム
【課題】選果システムにおける移送装置による載置台からトレイへの青果物の移送能率を向上させることができる技術を提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を、トレイ搬送装置53によって搬送されるトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6を等級や階級毎に前記トレイ8に詰める、選果システム1であって、移送装置60は、青果物6を吸着する吸着部66を複数個備え、複数個の吸着部66・66・・・にて複数個の青果物6・6・・・を一度に吸着可能に構成される。
(もっと読む)
ワーク受渡装置及びワーク受渡方法
【課題】ワークの形状等により整列して隣接するワーク同士が係合あるいは付着していても、ワークを一つずつ分けて受け渡すことができるワーク受渡装置及びワーク受渡方法を提供すること。
【解決手段】ワーク受渡装置1は、整列装置100の整列路から送り出す先頭のワークWを載置する昇降載置面11を有する昇降架台10と、昇降載置面11に隣接して、整列路面101の高さと異ならせた高さに設けられ搬送装置200にワークを受け渡す受渡載置面21を有する受渡載置台20と、昇降架台10の昇降載置面11を整列路面101と受渡載置面21との高さ位置に昇降駆動させる昇降駆動手段40と、受渡載置面21に対向して設置した支持ブロック30と、支持ブロック又は受渡載置台のいずれか一方に吸引開口31を形成して昇降載置面11のワークを吸引して受渡載置面21に受け渡す吸引機構50と、を備える構成とした。
(もっと読む)
容器受け渡し方法および容器受け渡し装置
【課題】スクリュー2の螺旋状の溝内にシリンジ等の容器4を直立した状態に保持して搬送する。
【解決手段】等ピッチで螺旋状の溝が形成され、この溝内にシリンジ4を保持して搬送するスクリュー2と、スクリュー2の溝内に保持されているシリンジ4の側面をガイドする、上方の昇降ガイド30および下方の昇降ガイド32と、シリンジ4を保持して前記スクリュー2の溝内に供給する容器保持手段(ロボット8)と、スクリュー2により搬送されるシリンジ4に追従して移動しつつシリンジ4をガイドする追従ガイド52とを備えており、上下の昇降ガイド30、32を、シリンジ4をガイドしない退避位置に移動させて、容器保持手段8が保持しているシリンジ4をスクリュー2に供給し、この保持した状態のまま上下の昇降ガイド30、32をシリンジ4をガイドする位置に移動させる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
電界放出ディスプレイ用のスペーサ自動実装システム及びスペーサ自動実装方法
【課題】アスペクト比が大きく且つ多数のスペーサを高速で実装することができる電界放出ディスプレイ用のスペーサ自動実装システムを提供する。
【解決手段】複数個のスペーサを水平整列パレット21に水平方向に整列する水平整列機と、複数個のスペーサを垂直整列パレット50に垂直に整列する反転機を含む垂直整列機5と、垂直整列パレット50と接着剤の塗布されたパネル9とが固定される実装ベースと、垂直整列パレット50に複数個のスペーサを真空吸着する真空吸着機70と、複数個のスペーサをパネル9にガイドするガイド兼加圧機80と、真空吸着機を垂直整列パレット50でパネル9の上側に移動させる第1ローダ91と、ガイド兼加圧機80をパネル9の上側に移動させる第2ローダ92と、垂直整列機5、真空吸着機70、ガイド兼加圧機80、第1ローダ91及び第2ローダ92を制御してパネル9に複数個のスペーサを実装する制御機とを含む。
(もっと読む)
食品類の搬送方法及びその搬送装置
【課題】食品の製造工程において最終醗酵工程と焼成工程とを食品生地類を載置した展板に振動を与えずに、旋回し移載する食品類の搬送方法及びその搬送装置を提供する。
【解決手段】コンベヤ装置1は、パン製造工程の最終醗酵工程と焼成工程とを結ぶ搬送経路を、複数台の直線状の搬送コンベヤK1とカーブ状の搬送コンベヤとで構成し、接続部に、展板2の底面を接触または非接触で吸着保持し、展板2に上下の振動を与ずに先の搬送コンベヤから後の搬送コンベヤに移載する移載搬送手段8を設ける。搬送コンベヤに並列なコンベヤベルト4a,4bの間には、展板2の底面を接触または非接触で搬送コンベヤの上面と水平に保持する複数個の吸着保持手段15を表面に設けた昇降かつ旋回可能な円形状のターンテーブル16を設置し、このターンテーブル16の裏面側中心部に設けた支持軸をスライド搬送手段18上に立設する。
(もっと読む)
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
電子部品検査装置及びトレイ移載装置
【課題】コストを削減するとともに電子部品の生産速度を向上させた電子部品検査装置及びトレイ移載装置を提供する。
【解決手段】トレイ100から電子部品Dを取得して第2の位置415で離脱させる保持手段3aと、回転軌跡上に第1の位置414と第2の位置415を含み、第2の位置415で離脱した電子部品Dを受け取って第1の位置414へ回転させる載替テーブル416とを備えることで、電子部品Dを供給するためのアクチュエータを載替テーブル416を回転させるダイレクトドライブモータ417まで削減する。
(もっと読む)
電子部品の搬送機構及びそれを備えた電子部品検査装置
【課題】電子部品の位置決め時間や処理時間を確保して処理精度の低下を回避
し、さらに電子部品の保持手段の配置数や工程処理ユニットの制約を緩和させることで電子部品の搬送効率を高めることができ、また、生産効率の向上を図って優れた信頼性と経済性を獲得可能である電子部品の搬送機構及びそれを備えた電子部品検査装置を提供する。
【解決手段】ターンテーブルTの外周に沿って等間隔離間して複数の保持ユニット1が取り付けられる。保持ユニット1の配置間隔は、ターンテーブルTの1ピッチの回転角度と等しく設定されている。保持ユニット1ごとに、2本の吸着ノズル2a、2bが設置されている。
(もっと読む)
物品移載装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
1 - 20 / 155
[ Back to top ]