
Fターム[3F072KD23]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | アーム式 (103)
Fターム[3F072KD23]の下位に属するFターム
水平軸まわり (11)
Fターム[3F072KD23]に分類される特許
21 - 40 / 92
ワーク搬送システム

【課題】より簡易な構成で生産性の高い生産ラインを構築できるワーク搬送システムを提供する。
【解決手段】搬送装置10、11は、レール軌道14、15の上にそれぞれ独立して移動する複数の搬送ロボット16a〜16dを有し、各搬送ロボットは、ワーク12を保持するハンド17a〜17dを備える。例えば、搬送ロボット16aが保持するワーク12に対して、作業装置18aが直接組立作業や加工処理を行い、作業終了後に搬送ロボット16aが下流方向へ移動し、隣接する次工程の搬送ロボット16bとの間でワーク12の受渡しを行う。次工程の搬送ロボット16bは同様の動作を行い、ワーク12を矢印で示す下流方向へ順次搬送する。隣接する搬送ロボットとのワーク受渡し位置を変更することで、生産ラインの高速化を図ることができる。
(もっと読む)
容器搬送装置

【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
複数ワークの支持方法
【課題】ワーク移送用ハンガーへのワークの掛け作業及び処理完了後のワークの降し作業を、作業の省力化と効率向上、更にはワークの表面処理面の品質向上を目的として自動化するためのワークの自動掛け方法やその方法を使用した自動掛け装置に適用して有用な複数ワークの支持方法を提供すること。
【解決手段】セパレータによりガイドレール上に分離整列された複数ワークを、セパレータに保持させたまま、前記ガイドレール上方でサポート部に片持ち支持された串状支持体に向け移動させ、各ワークに設けられた掛止孔又は切欠に前記串状支持体を貫通させることにより、前記複数ワークを分離整列状態のままで前記レール上で前記串状支持体にまとめて支持させること。
(もっと読む)
可搬式レール反転装置
【課題】レールを効率的に反転可能で、移動が容易な可搬式レール反転装置を提供する。
【解決手段】レールのウェブにその端部から二股状のフォーク金具13を装着し、レールを回転するレール反転装置10であって、レールに直交する方向に移動可能な台車14と、台車14の進行方向に沿って設けられたガイドレール15、16と、ガイドレール15、16に沿って移動可能な移動架台17と、移動架台17に昇降手段18を介して上下動可能に設けられたベース架台19と、ベース架台19に水平軸を介して回動可能に取り付けられた傾動架台22と、傾動架台22に軸受を介して取り付けられ、両端にフォーク金具13が設けられた、ガイドレール15、16に直交する軸心方向にスライド可能な反転スライド軸24と、反転スライド軸24を回転させる回転駆動手段25と、傾動架台22の回動角度を制限する傾動角制限手段とを有している。
(もっと読む)
野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置
【課題】廉価で比較的確実に段ボール箱の変形や破損を検知して次行程に搬送できる野菜又は青果が梱包された段ボール箱の幅検査装置及びピッキング装置を提供。
【解決手段】野菜又は青果が梱包された段ボール箱2と、段ボール箱を搬送する搬入コンベア4と、搬入コンベアから移送された段ボール箱を所定位置に停止させる待機部10と、待機部の段ボール箱を把持するロボット13と、ロボットに把持された段ボールが積み込まれる搬送用台車15とを有するピッキング装置1及び、ピッキング装置に用いる幅検査装置5であって、待機部の前行程に一対の当接板54,56を段ボール箱の両側面4bに当接させ、一対の当接板の距離Hが予め定められた距離以上の場合には、待機部外7,8へ搬出し、未満の場合には、待機部へ搬送する判別機6を設ける。
(もっと読む)
石英ガラスルツボのハンドリング装置及びハンドリング方法
【課題】クリーンな環境下にて、石英ガラスルツボを堅固に挟持し、確実に移動させることのできるハンドリング装置。
【解決手段】水平方向に延びるビーム2、及び、ビーム2の中心軸線方向に対し直交する方向にビーム2から突出し、少なくとも一方がビーム2の中心軸線方向に移動可能である一対のアーム3を具えるフレーム4の、一対のアーム3に組み付けられた、石英ガラスルツボ5の胴部50をルツボの径方向に挟持する相互に対向する一対の挟持手段6、各挟持手段6に隣接して設けられ、石英ガラスルツボ5をルツボの中心軸線方向に挟んで掛止するルツボの中心軸線方向に近接離間可能な一対の舌片からなる掛止手段7、並びに、挟持手段6及び掛止手段7をアーム3に沿って往復運動させる駆動手段8を具える石英ガラスルツボ5のハンドリング装置1である。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
ワーク移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】ワークWを第一位置P301と第二位置P302との間で移載するワーク移載装置300であって、ワークWを把持するチャック部11、12、13を有するチャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に接続され、チャックユニット10を配列変換部20ごと第一位置P301と第二位置P302との間で移動させるワーク搬送部30と、を備える。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
レンズ搬送装置およびレンズ加工システム
【課題】レンズ搬送を高速で行うことのできるレンズ搬送装置を提案すること。
【解決手段】レンズ搬送装置20は、第1位置P1において上方から未加工レンズ2Aを受け取り、当該未加工レンズ2Aを第2位置P2に搬送して上方に位置するレンズホルダー11に引き渡すために用いる供給側レンズ搬送容器25と、第2位置P2において上方に位置するレンズホルダー11から加工済みレンズ2Bを受け取り、当該加工済みレンズ2Bを第3位置P3に搬送して上方に排出するために用いる排出側レンズ搬送容器26とを備えている。これらの容器25、26の退避位置P0(25)、P0(26)は第1〜第3位P1〜P3の間にあり、これらの容器25、26は二軸送り機構24によって一体として直線送りされて各位置に位置決めされる。少ない送り動作回数で、直線状の短い経路を移動させればよいので、レンズ搬送動作を短時間で行うことができる。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
仕分装置
【課題】効率良く仕分作業ができる仕分装置を提供する。
【解決手段】仕分装置1は、収納容器A内から物品Wを取り出す取出手段11と、この取出手段11で取り出した物品Wを搬送する第1物品搬送手段12とを備える。仕分装置1は、物品Wを搬送する第2物品搬送手段41と、オーダ情報に基づく数の物品Wを第1物品搬送手段12上から第2物品搬送手段41上に押し出して載せ換える押出手段46とを備える。第2物品搬送手段41上の物品Wを保持手段51のロボットハンド部で保持して出荷容器B内に投入する。
(もっと読む)
包装機への袋供給方法及び装置
【課題】横型製袋機と包装機が併設されかつ両者が連動する製袋包装機において、種々のタイプの横型製袋機と包装機の組み合わせ及び設置形態を可能とする。
【解決手段】横型製袋機から送り出された袋を位置決めする位置決めコンベア3、袋を包装機のコンベアマガジン式給袋装置に順次供給する供給コンベア39、及び位置決めコンベア3と供給コンベア39の間に配置された第1〜第3移送手段からなる。第1移送手段4,5は、位置決めコンベア3上の袋を吸着して持ち上げ、開口部を下向きとした垂直姿勢に変更する。第2移送手段21,22は第1移送手段4,5に保持された袋を挟持部材27で挟持して受け取り、所定位置に水平移送すると同時に袋を回転させて袋面を前記供給コンベアの送り方向に向ける。第3移送手段35は第2移送手段21,22に保持された袋を吸着して受け取り、水平姿勢に変更し開口部を送り方向に向けて前記供給コンベア39上に置く。
(もっと読む)
分離装置
【課題】本発明は半導体検査装置において半導体素子を一つずつ分離して反り問題を解決するための分離装置を開示する。
【解決手段】この分離装置は動力源、押下台、第一スウィングアームセット、第二スウィングアームセット、第三スウィングアームセット、第一グリッパーセット、第二グリッパーセット、第一プッシュブロック、第二プッシュブロック及びストップアームからなる。動力源を駆動して押下台を下降させて各スウィングアームセットを押さえ付けることによって、第一グリッパーセット、第二グリッパーセット及びストップアームで分離作業を行う。この分離装置は動力源のみを有すると共にこの動力源で各部材を動かして分離を行うので、分離速度を加速してフィードシステムの体積を縮小することができる。
(もっと読む)
ワーク搬送装置およびその搬送制御方法
【課題】装置自体がコンパクトで場所を取らず、構成部品を減らして、設備コストを抑制可能なワーク搬送装置を提供する。
【解決手段】加工前ワークW1を搬送して加工ステーションに投入すると共に、加工ステーションから加工済ワークW2を取出して送り出すワーク搬送装置20である。
ワーク搬送装置20は、基体21に、加工前ワークW1を投入するべく搬送する第1の搬送機構22と、加工済ワークW2を取出し、搬送する第2の搬送機構23とを備える。
これら第1、第2搬送機構22、23は、基体21に固設した共用雄ねじ24に、ねじ対偶で、それぞれ制御移動可能に構成した。
(もっと読む)
容器群積付け装置及び積付け方法
【課題】簡易な装置構成で多様な形状、素材、剛性及び重量の容器を損傷させずに、又、多様な配列の容器群の寸法差異や整列状態の乱れ、あるいは容器の欠落に影響を受けないでパレット上に容器群を安定して段積みできる積付け装置及び方法を提供する。
【解決手段】容器群積付け装置1は、幅広い種類の容器に対応可能な吸引ヘッド2、その移動手段及び負圧供給手段4を具備する保持搬送装置10を備えており、保持搬送装置10の吸引ヘッド2を移動手段で移動させて一連の段積み操作を行う。即ち多列ステージ22に整列された容器群を吸引ヘッド2で吸引保持した後、セパレートシート供給装置23で供給されたセパレートシート上に移動する。そこで、吸引ヘッド2に吸引保持された容器群の下側にセパレートシートを更に吸引保持した後、パレット20上に搬送し、両者を一体でパレット20に積む。この操作を繰り返して段積みを完了する。
(もっと読む)
パッケージング装置および物品の包装方法
物品を包装するためのシステムであって、当該システムは、アイテム(7)の第1の流れを形成するようアイテムを輸送するための第1のコンベア(6)と、アイテムの第2の流れを形成するようにアイテムを輸送するための第2のコンベア(23)と、二つの流れの一つ以上からのアイテムと係合すると共に、この二つの流れの一方から、この流れと実質的に交差する方向に、そのように係合させられたアイテムを移送することができ、かつ、これら二つの流れの少なくとも一方が連続的に動いている間に、この二つの流れの他方における隣接するポイントに、これらのアイテムを配置するための第1のツール(16)とを具備してなる。 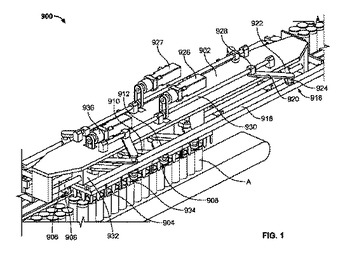 (もっと読む)
(もっと読む)
ハンドリング装置、制御装置及び制御方法
【課題】コンベアによって搬送されている各ワークを効率のよい順番で処理することができるハンドリング装置、制御装置及び制御方法を得る。
【解決手段】ベルトコンベア2によって搬送されているワーク10を撮像して該ワーク10の位置を示すワークデータを生成する視覚センサ3と、搬送されているワーク10に対して所定の作業を行うロボット4と、視覚センサ3から送信されたワークデータを蓄積してデータベースを作成し、該データベースを用いてロボット4の位置に搬送されたワーク10に所定の作業を行うように該ロボット4を制御するコントローラ5とを備え、コントローラ5がデータベースに格納されている各ワークデータに所定の演算を行って複数のワーク10に対してロボット4が作業を行う順番を並べ替える。
(もっと読む)
移載装置
【課題】移載対象物の撓みを抑制すると共に、移載能率の向上を図ることができる移載装置を提供する。
【解決手段】ガラス基板を搬送するハンド装置から受け渡されたガラス基板を支持すると共に、支持したガラス基板を搬送ライン2に移載する移載装置であって、ハンド装置の移動経路上に位置し、ガラス基板を支持する支持位置と、上記移動経路上から退避する退避位置との間を、互いに独立して駆動される複数の支持装置4を有するという構成を採用する。
(もっと読む)
ワークの搬送・加工装置
【課題】高速で安定したレンズなどのワークの搬送動作を行うことのできる搬送機構を備えたレンズの搬送・加工装置を提案すること。
【解決手段】レンズの搬送・加工装置1では、第1旋回アーム11によって円弧状の移動軌跡に沿って第1レンズ搬送容器21を第1位置から第2位置に搬送し、第2旋回アーム12によって円弧状の移動軌跡に沿って第2レンズ搬送容器22を第2位置から第3位置に搬送している。剛体である旋回アーム11、12によってレンズ搬送容器22、23を搬送しているので、搬送中にレンズ搬送容器21、22が振動してそこに搭載されているレンズWa、Wbにズレが生ずることが無い。旋回アーム11、12によってレンズ搬送容器21、22を高速で移動させることができる。
(もっと読む)
21 - 40 / 92
[ Back to top ]