
Fターム[3F204CA05]の内容
クレーンの細部(制御、安全) (2,955) | 目的 (511) | 安全対策→DA,FA〜FE (204)
Fターム[3F204CA05]に分類される特許
101 - 120 / 204
クレーン警報システム
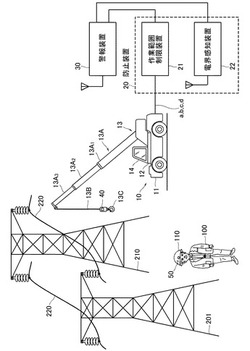
【課題】 クレーンでの作業中に、作業者に対して警報を確実に知らせることができるクレーン警報システムを提供する。
【解決手段】 先端部にフック13Cが吊り下げられているブーム13Aを備えるクレーン13に用いられるクレーン警報システムであって、ブーム13Aの動きが安全範囲を超えたときに、検出信号を出力する防止装置20と、防止装置20からの検出信号を受け取ると、警報信号を送信する警報装置30と、フック13Cに取り付けられ、警報信号を受信すると、警報を出力するクレーン側受信端末40とを備える。
(もっと読む)
作業機械

【課題】作業機械の足場環境が悪い場合にも、把持物を、円滑かつ安全に把持し移動することができる作業機械を提供する。
【解決手段】フロント作業腕101の先端に設けた把持装置10によって対象物を把持移動させる作業機械において、把持すべき対象物の重量及び材質を検出し、それに応じて把持装置10の最適な把持力、及びフロント作業腕101の動作速度を演算し、この演算値に基づいて、把持装置10による対象物の把持力、
及び対象物を把持したフロント作業腕101の動作速度を制御する制御ユニット22を備える。
(もっと読む)
作業車両
【課題】本発明は、作業用油圧アクチュエータに供給される作動油が過度に高温になることを抑制可能な作業車両を提供することを目的とする。
【解決手段】作業車両は、走行用油圧アクチュエータ17と、走行用油圧アクチュエータ17を駆動するための走行用油圧ポンプ4と、走行用油圧ポンプ4により走行用油圧アクチュエータ17を駆動させるための走行用油圧回路の作動油が戻される第1貯留部T1と、作業用油圧アクチュエータ6と、作業用油圧アクチュエータ6を駆動するための作業用油圧ポンプ3と、第1貯留部T1とは別に形成され、作業用油圧ポンプ3に供給される作動油が貯留される第2貯留部T2と、を備える。
(もっと読む)
クレーンのジブ支持方法及び装置
【課題】暴風時、複数台のクレーンを設置周辺の状況に影響されずに安定配置させることができ、転倒等を確実に防止し得るクレーンのジブ支持方法及び装置を提供する。
【解決手段】マスト2に旋回体4が旋回自在に配置され且つ該旋回体4上にジブ5が起伏自在に取り付けられたクライミングクレーン1をビル等の構築物12上に複数台配置している場合に、前記旋回体4に他のクライミングクレーン1のジブ5を支持可能な受台13を設け、暴風時、前記クライミングクレーン1のジブ5を、他のクライミングクレーン1の受台13に相互に支持せしめる。
(もっと読む)
クレーントロリにおける緊急ブレーキ装置
【課題】低コストで容易に緊急ブレーキ装置を設置する。
【解決手段】トロリ(26)に、ガータ(25)に敷設された横行ラック(35)に噛み合う横行ピニオン(36)を回転駆動してトロリ(26)を横行駆動する横行駆動装置(34)を設け、トロリ(26)に、横行ラック(35)にそれぞれ噛み合う制動ピニオン(62)を出力軸に取り付けた無励磁作動ブレーキ(63)付の緊急制動モータ(64)を設け、横行移動時に無励磁作動ブレーキ(63)の電磁コイル(77)に給電して無励磁作動ブレーキ(63)を非作動とし、制動ピニオン(62)を遊転させ、緊急停止ボタンの操作により、無励磁作動ブレーキ(63)の電磁コイル(77)への給電を停止して無励磁作動ブレーキ(63)を作動させ、制動ピニオン(62)を制動してトロリ(26)を停止させる。
(もっと読む)
クレーンの制御油圧回路
【課題】 電磁比例減圧弁にスティックが生じても、暴走を停止できるようにする。
【解決手段】 電磁比例減圧弁12a,12bと油圧式アクチュエータ16のメインオペレート弁13のパイロットポート22a,22bを繋ぐパイロットライン21a,21bに、スロットルチェック弁27a,27bを設け、その下流側位置より分岐させた各分岐パイロットライン28a,28bの先端側ポートA1,B1に、セルフシール継手29a,29bを設ける。油戻しライン24の分岐油戻しライン30の先端側ポートT1にセルフシール継手31を設ける。両端部にセルフシール継手33を取り付けたゴムホース32を別途備える。電磁比例減圧弁12a,12bにスティックが生じた場合は、スロットルチェック弁27a,27bの絞りを全閉とすることで、メインオペレート弁13のパイロットポート22a,22bに作用するパイロット圧を遮断させる。
(もっと読む)
コイルリフターにおける危険警報装置
【課題】コイルリフターがコイルを片利き状態で掴んでいるときに所定のアラームを出力して安全性を確保する。
【解決手段】コイルリフターに、コイルの内径空間に挿入される爪部にコイル内面が載っていることを検出する左右一対の在荷検出用リミットスイッチ56a,56bと、コイル側面がアーム内面に圧接していることを検出する左右一対のコイル掴み確認用リミットスイッチ34a,34bとを設け、左右一対の在荷検出用リミットスイッチおよび左右一対のコイル掴み確認用リミットスイッチによる検出結果の組み合せに基づいてコイルがコイルリフターの正規位置に位置していないと判断されたときにONとなるリレー回路を介して警報ブザーBUZZなどのアラーム手段を動作させ、オペレータに異常状態を知らせ、クレーン巻上操作を停止させることができる。
(もっと読む)
クレーンの免震支持装置
【課題】地震による構築物の揺れをクレーンが直接受けることを防いで、該揺れに伴うマストの変位並びに加速度を最小限に抑え、クレーンの損傷を防止し得るクレーンの免震支持装置を提供する。
【解決手段】構築物12のフロア12aの梁12bにクライミングクレーン1のマスト2を支持せしめるようにし、構築物12に対しマスト2を支持せしめる箇所を上下二段に設定し、上下二段の支持箇所にてクライミングクレーン1に作用する転倒モーメントMを反力として支持し、上下二段の支持箇所の少なくとも一方にてクライミングクレーン1に作用する垂直荷重Wを支持し、下段の支持箇所に、互いに直交する二本の水平軸13,14をそれぞれ中心としてマスト2を揺動自在に支持する揺動機構16を配設すると共に、上段の支持箇所に、マスト2を水平方向変位吸収手段17を介して支持する免震機構18を配設する。
(もっと読む)
クレーン制御装置
【課題】吊り装置がワークを正常な状態で掴んでいない場合にはクレーンの巻き上げ操作を不可能にして安全性を確保する。
【解決手段】クレーン制御装置60は、オペレータによりクレーン巻上スイッチ62がONにされたときにモータ63によるクレーン巻上を許容するクレーン巻上操作回路61において、常時閉のリレー64をこれらと直列に配し、コイルリフターなどの吊り装置がワークを正常に掴んでいないことを検知したときに送信される異常検知信号NSをクレーン側の受信手段65が受信したときに、制御信号C1によってリレーを開く。これにより、クレーン巻上スイッチがON操作されてもクレーン巻上が行われないよう強制遮断する制御が行われる。
(もっと読む)
クレーンの免震・制振複合装置
【課題】大地震発生初期の対応に優れ且つ長周期の地震の対応にも優れ、大地震発生時にクレーンに作用する大きな外力を効率良く低減し得るクレーンの免震・制振複合装置を提供する。
【解決手段】コンテナクレーン3の支持脚部としての脚部5に、免震用水平方向変位吸収装置17を設けると共に、コンテナクレーン3の上部に、制振用マスダンパー装置30を設ける。
(もっと読む)
クレーンの免震支持構造
【課題】簡単な構造で且つバラスト等を一切搭載せずに、クレーンの安定性を高めつつ、該クレーンに対し水平面内のあらゆる方向に作用する地震に伴う加振力を効率良く吸収して減衰させ得るクレーンの免震支持構造を提供する。
【解決手段】クライミングクレーン1の支持脚部としてのマスト2を構成するマストブロック2aの四隅の支柱2bの上下端に連結用のフランジ部12,13を形成し、該フランジ部12,13同士を、球面軸受14を介して該フランジ部12,13間に隙間cが形成されるよう上下に対向配置すると共に、該上下に対向配置したフランジ部12,13同士を、前記球面軸受14を介して互いに密着させる方向へ付勢する弾性材15が介装され且つフランジ部12,13同士の上下方向への相対変位を許容する締結部材16によって連結する。
(もっと読む)
車両乗込み用手摺
【課題】 移動式クレーンなどの車体のデッキ上に安全に昇降できるための手摺を設ける。
【解決手段】 車両1のデッキ2上あるいはデッキ2から上方に離間して配置した運転席4に地上から乗込む昇降用ステップ5を車両1の側縁に取付け、昇降用ステップ5を取付けた近傍のデッキ2上に昇降用ステップ5を昇降する際に掴む手摺7を左右方向から前後方向に内側の奥に向かって湾曲させて取付けたことを特徴とする車両乗込み用手摺6を設けた。
(もっと読む)
荷重負荷機械
【課題】本発明は、機体バランスを高精度に算出して即応性の高い転倒回避を行うことができる荷重負荷機械を提供することにある。
【解決手段】本発明は、地面に接地する地面接地部2と、この地面接地部2に連結された荷重負荷部3とを備えた荷重負荷機械(1)において、前記地面接地部2と荷重負荷部3の連結部(4,8)に複数の力学量検知センサ(11A〜11D)を設けると共に、これら力学量検知センサからの検出信号に基づいて機体バランスを演算して転倒の危険性を判断する演算装置15と、この演算装置からの指令により転倒回避指令を出力する転倒回避指令出力手段16を設けたのである。
このように構成することで、各力学量検知センサからの検出信号を比較するだけで作業中の機体バランスをリアルタイムで得ることができ、また、その結果を転倒回避指令出力手段16で出力するので、オペレータは荷重負荷機械の転倒回避を即行うことができる。
(もっと読む)
ブームを有する作業機の安全装置
【課題】伸縮ブーム4を支持する起伏シリンダ5支持力を検出する支持力検出手段9が正常に検出しているか否かを判別するために、伸縮ブームをブームレスト6に載せた状態で伸縮ブームを倒伏させるよう前記起伏シリンダを作動させて起伏シリンダの油圧回路に配置したリリーフ弁をリリーフ圧にまで作動させ、前記支持力検出手段で検出される出力値が予め設定した基準値に基づく所定範囲内であるか否かにより判別手段S9で判別する際に、油温によりリリーフ圧が変化しても判別できる伸縮ブームを有する作業機の安全装置を提供する。
【解決手段】
前記リリーフ弁のリリーフ圧を検出するリリーフ圧検出手段19を設け、リリーフ圧検出手段で検出される圧力により前記前記支持力検出手段で検出される出力値あるいは前記基準値を補正する補正手段S8を備えたもの。
(もっと読む)
自動走行クレーンとその走行位置検出装置
【課題】全長の長い走行レール上に3台以上のクレーンが配置されている場合にも、各クレーンの走行位置を精度よく迅速に検出することができる自動走行クレーンとその走行位置検出装置を提供する。
【解決手段】クレーンの走行レール2を支持する横梁14の側方に、多数の磁気ロッド20を走行区間の全長にわたり直列に配置する。またクレーン本体に磁気ロッド20が発生する磁束を感知して絶対位置を検出する複数本の検出ヘッド30を走行方向に位置をずらせて搭載する。磁気ロッドは、一定寸法のロッドの内部に複数個の磁石を埋め込んだものであり、検出ヘッドは所定ピッチで配置された多数のホールセンサを備えたものが好ましい。また本発明の自動走行クレーンは上記の走行位置検出装置を備えたことを特徴とするものである。
(もっと読む)
トラック搭載型クレーンの安全装置
【課題】トラック搭載型クレーンの安全装置では、アウトリガの支持力を支持力検出手段13で検出し支持力が予め設定した安定支持限界性能以下になる安定限界を監視する安定支持限界監視制御手段15と、伸縮ブームに作用する負荷がクレーンの構造物の強度によって定まる強度限界を監視する負荷限界監視制御手段14とを備えているが、支持力検出手段が故障した場合に対応できる安全装置を提供する。
【解決手段】トラックの荷台に荷物を積載しない状態でのクレーン作業時の安定度から決定される空車時安定限界性能を設け、ブームに作用する負荷がこの空車時安定限界性能に達するか否かを監視する空車時安定限界監視制御手段16と、前記支持力検出手段13の故障を判別する支持力検出故障判別手段17とを配置し、支持力検出故障判別手段が故障を判別すると負荷限界監視制御手段と空車時安定限界監視制御手段による制御で対応する。
(もっと読む)
搬送車
【課題】不本意な事態が発生した場合でも、搬送物の損傷や落下を防止しうる吊り下げ型搬送車の提供。
【解決手段】吊り下げ型の搬送車100であって、搬送物300の基準面への落下を防止する落下防止部材141と、落下する搬送物300と干渉して搬送物300を受け止める位置と、昇降する搬送物300と干渉しない位置とに落下防止部材141の位置を変換する変換装置142と、上昇する搬送物300が落下防止部材141に接触した際に落下防止部材141が搬送物300をかわすように落下防止部材と変換装置とを接続するヒンジ構造部材143とを備える。
(もっと読む)
天井クレーン
【課題】地震が発生したときにクレーン本体の浮き上がりを防止し、クレーンガーダに損傷を与える心配のない天井クレーンを提供する。
【解決手段】クレーン本体10に本体側磁石を設け、クレーンガーダ14にガーダ側磁石を設け、地震発生時に本体側磁石とガーダ側磁石が互いに引き合い、クレーン本体10が走行レール16に押し付けられるように構成した。ここで、本体側磁石はクレーン本体10の第2底部10bに設けられた電磁石26であり、ガーダ側磁石はクレーンガーダ14の側部14aにクレーン本体10の移動方向に一定のピッチで並べて設置された電磁石の磁極列24であり、電磁石26と磁極列24とは所定の間隔を置いて対向している。従って、例えば地震時に、電磁石26とこれに対向する磁極列24の電磁石とが互いに引き合うような状態にすることで、クレーン本体10が浮き上がることがなくクレーンガーダ14に衝突することが回避できる。
(もっと読む)
作業機械のデータ記憶装置
【課題】作業データを効率よく記憶して必要十分な情報を得る。
【解決手段】作業状態に応じて変化する作業データを取得するデータ取得手段2,3と、データ取得手段2,3により取得した作業データを所定の周期で記憶する第1および第2の記憶手段12,13と、データ記憶指令を出力する指令出力手段1と、データ記憶指令に応じて作業データを記憶するデータ記憶手段15と、第1の記憶手段12に第1の周期で作業データを記憶し、第2の記憶手段13に第1の周期よりも長い第2の周期で作業データを記憶するとともに、データ記憶指令が出力されると、第1および第2の記憶手段12,13に記憶されたデータをデータ記憶手段15に記憶するように各記憶手段12,13,15を制御する制御手段16とを備える。
(もっと読む)
建設機械のアーム駆動用制御装置
【課題】
ショベルカーのアームの旋回制御において、小型で強力な電動機が出現したことで、電動機駆動が実用され始めたが、操作レバーによる左右旋回制御では、加速、減速状態時とも応答速度は同じであるため、作業性が悪く、同時に安全性にも問題があった。
【解決手段】
旋回速度の加速時と減速時の応答速度を個別に設定できるように、操作レバーによる速度指令信号から加速状態か減速状態かを判断し、インバータへの速度指令の前段に設けられたフィルタの時定数を、加速状態時には加速状態時用の時定数を、減速状態時には減速状態時用時定数を選択して設定することで、加減速時の応答速度を各別に設定できるようにした。加速減速状態の判断では、レバーの機械的振動によるノイズを除去し、さらに、急な加減速でもスムーズな切替えを実現し、作業性、安全性の向上を実現した。
(もっと読む)
101 - 120 / 204
[ Back to top ]