
Fターム[3F204CA05]の内容
クレーンの細部(制御、安全) (2,955) | 目的 (511) | 安全対策→DA,FA〜FE (204)
Fターム[3F204CA05]に分類される特許
61 - 80 / 204
リフト装置及びシステム
リフト・システム用リフト装置を開示する。本装置には、a)吊り上げ力を供給するためのモーター、b)積載装置をモーターに接続するべく、モーターに動作可能に接続された少なくとも一つのコネクタc)積載装置に関する負荷限界情報を受信する情報受信機、d)モーターおよび情報受信機に電気的に接続されたモーター・コントローラであって、情報受信機により受信された負荷限界情報に基づき、モーターの吊り上げ力を制限するモーター・コントローラ、が含まれる。 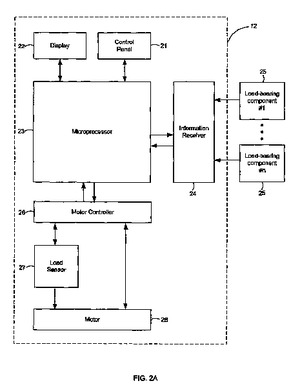 (もっと読む)
(もっと読む)
岸壁クレーン

【課題】脚構造物とスライド式ブームを有する岸壁クレーン(ロープロファイルクレーン)において、クレーンの重量増加量を抑制し、且つ、低コストで、制振構造を導入したクレーンを提供する。
【解決手段】岸壁クレーン1に上部構造物30又は脚構造物31と、スライド式ブーム2の相対移動を減衰する振動減衰機構を設置し、上部構造物30又は脚構造物31に、スライド式ブーム2を支持する支持機構8を設置し、第1の条件下では、支持機構8でスライド式ブーム2を支持し、スライド式ブーム2とローラ3の接触を禁止する制御を行い、第2の条件下では、支持機構8によるスライド式ブーム2の支持を解除して、スライド式ブーム2とローラ3を接触させ、スライド式ブーム2を揺動自在とする制御を行う。
(もっと読む)
接近警報装置

【課題】 あらゆる保線現場で、クレーンのブーム先端が高圧架空線から常に一定の距離に接近したことを検知できるように対応し得る接近警報装置を提供する。
【解決手段】 高圧架空線40が発する電界を検知し、高圧架空線40からの距離に比例する電界強度をA/D変換した値を無線送信する充電検知器1と、充電検知器1から無線送信された電界強度のA/D変換値を受信する警報器21とからなり、警報器21は、充電検知器1を高圧架空線40から所望の距離に配置した時に受信したA/D変換値に基づいて警報開始を設定可能とする。
(もっと読む)
走行式クレーンの免震構造
【課題】コンテナクレーンやアンローダなどのように、脚部を備えて門形に構成されたクレーン本体とそのクレーン本体をレールに沿って走行させるための車輪を備えた走行装置とを有する走行式クレーンにおいて、地震波に対して長周期地震動成分も含めて的確に免震性能を発揮することができる、走行式クレーンの免震構造を提供する。
【解決手段】クレーン本体10と走行装置12の間に下部免震装置30Bが配置されているとともに、脚部11が、縦部材21と水平部材22によって門型に構成された上部脚部11aと、縦部材23と水平部材24によって門型に構成された下部脚部11bに分割されていて、その上部脚部11aと下部脚部11bの間に上部免震装置30Aが配置されている。
(もっと読む)
クレーン装置の制御方法
【課題】いわゆるダブルフック型の天井走行クレーン装置を用いて吊荷を傾斜させたときの落下事故を防止することが可能な制御方法を提供する。
【解決手段】本発明は、クレーン本体1と、クレーン本体に載置された一対の台車2A,2Bと、各台車にそれぞれ取り付けられた一対のフック3A,3Bとを備え、各フックが互いに連動して昇降可能な第1の状態と、前記各フックが独立して昇降可能な第2の状態とを切り替え可能とされたクレーン装置100を制御する方法である。本発明は、一対のフック間距離と各フックの高さとを検出するステップと、検出した一対のフック間距離及び各フックの高さに基づいて、一対のフックで吊持する吊荷の傾斜角度を算出するステップと、算出した吊荷の傾斜角度が、予め設定した吊荷の安定限界角度に到達した場合には、各フックの昇降動作を強制的に停止させるステップとを含む。
(もっと読む)
作業車の安全装置及び作業車
【課題】通信不良の前兆を捉えて作業機の動作速度を減速できる作業車の安全装置を提供する。
【解決手段】駆動手段61,62によって駆動される作業機14,15と、作業機14,15の状態を計測する計測手段31,32と、計測された状態情報を伝送する伝送手段33と、伝送された状態情報を受信するとともに駆動手段61,62を制御する制御手段5と、を備える作業車の安全装置2である。
そして、制御手段5は、伝送手段33との間の通信エラー率に応じて駆動手段61,62の速度を減少させて作業機14,15を駆動する。
(もっと読む)
回転格納式手摺
【課題】安全帯用ロープを連結するための手摺を簡単な作業によりジブの内側に格納する。
【解決手段】手摺本体20が取り付けられる回転側手摺取付ブラケット35は、ジブ縦材15の軸周りに回転可能である。よって、手摺本体20を、ジブ10の外側から内側へ簡単な作業により格納できる。したがって、このような格納ができない場合に比べ、ジブ10の組立および分解に要する作業時間の短縮と省力が可能である。
(もっと読む)
移動方向表示装置並びに天井クレーン装置の搬送物移動方向表示システム
【課題】作業者がコントローラを見ながら操作し、操作後に一々上方に位置する移動体若しくは搬送物を視認しなくても容易に移動体の移動方向を認知することができる画期的な移動方向表示装置並びに天井クレーン装置の搬送物移動方向表示システムを提供する。
【解決手段】作業者がコントローラ1を用いて移動体2を操作して搬送物3を運搬する運搬装置と併用する移動方向表示装置であって、基体部4に床面や地面などの前記作業者の歩行面5に対して光線を照射する照射部6を設け、この照射部6を、前記移動体2を所望の方向に移動させるために前記コントローラ1を操作した際に、前記歩行面5に前記移動体2の移動方向を指し示す方向指示表示7を形成するように構成した移動方向表示装置。
(もっと読む)
岸壁クレーン及びその制御方法
【課題】
大規模地震に対応した免震構造及び制振構造を有するクレーンを提供する。つまり、あらゆる地震動の周期特性に対して免震及び制振することのできるクレーンを提供する。
【解決手段】
脚構造物3と走行装置2を有する岸壁クレーン1において、前記岸壁クレーン1が少なくとも、振動解析用モデルにおいて質点と見なせる第1質量体及び第2質量体を有し、地表面5と前記第1質量体の間に第1免震装置11を設置し、前記第1質量体と前記第2質量体の間に第2免震装置12を設置する。
(もっと読む)
岸壁クレーン
【課題】
大規模地震動に対応した大きな免震ストロークを得ることができる免震構造を有するクレーンを提供することにある。更に、地震発生後に、クレーンを復旧し、迅速に荷役作業を再開することのできるクレーンを提供する。
【解決手段】
岸壁クレーンにおいて、脚構造物2を、上部海側脚10aと上部陸側脚11a、及び上部海側脚10aと上部陸側脚11aを連結する上部水平材13を有する上部構造物3と、下部海側脚10bと下部陸側脚11b、及び下部海側脚10bと下部陸側脚11bを連結する下部水平材14を有する下部構造物4に分割し、地震発生時に揺動した上部構造物3の位置を、上部構造物3の有する位置エネルギから得られる復元力により戻す岸壁クレーン1であって、下部構造物4から下方に延伸したリンク部材15で、上部構造物3を懸吊するように構成した。
(もっと読む)
岸壁クレーン及びその制御方法
【課題】
大規模地震動に対応した大きな免震ストロークを得ることができる免震構造を有するクレーンを提供する。つまり、海陸方向に約±1000mmの免震ストロークを有し、地震により岸壁が崩れレールスパンが広がる現象にも対応できるクレーンを提供する。
【解決手段】
脚構造物3と走行装置4を有し、脚構造物3が海陸方向に変形する台形リンク脚2を有する岸壁クレーン1であって、海側の走行装置4aと脚構造物3の間に、上部間隔を下部間隔より広くし、且つ平行とならない海側揺脚20a及び海側リンク脚21aを設置し、陸側の走行装置4bと脚構造物3の間に、上部間隔を下部間隔より広くし、且つ平行とならない陸側揺脚20b及び陸側リンク脚21bを設置し、海側リンク脚21a及び陸側リンク脚21bと、脚構造物3の間にそれぞれ免震装置22a、22bを設置する。
(もっと読む)
岸壁クレーン
【課題】レベル2地震動に対応する大変位免震装置を備えた岸壁クレーン。
【解決手段】岸壁Gと平行な方向に移動可能な走行装置2,3上にクレーンの脚構造物4を設けた岸壁クレーン1において、前記走行装置2,3上に、該走行装置2,3の海陸両側に張り出した平面状の担持部10を設け、該担持部10の海陸両張出部10a,10bにそれぞれアウトリガ11を設け、かつ、前記担持部10上に大変位量に対応した免震装置20を介して前記脚構造物4を設置する。
(もっと読む)
岸壁クレーン
【課題】脚構造物とスライド式ブームを有するロープロファイルクレーンにおいて、クレーンの重量増加量を抑制し、且つ、低コストで、制振構造を導入したクレーンを提供する。
【解決手段】上部構造物30と前記スライド式ブーム2の相対移動を減衰する振動減衰機構を設置し、上部構造物30にワイヤロープドラム4、海側緊張装置7a、陸側緊張装置7bを設置し、ワイヤロープドラム4から海側に第1ワイヤロープ6aを繰り出し、第1ワイヤロープ6aは、海側緊張装置7aを経由してブーム2に接続し、ワイヤロープドラム4から陸側に第2ワイヤロープ6bを繰り出し、第2ワイヤロープ6bは、陸側緊張装置7bを経由してブーム2に接続し、地震発生時には、海側緊張装置7a及び陸側緊張装置7bの作動により、緊張状態であった第1ワイヤロープ6a及び第2ワイヤロープ6bにたるみを発生させ、ブーム2を揺動自在とする制御を行う。
(もっと読む)
免震化アウトリガ及び該免震化アウトリガを用いた走行クレーン
【課題】荷重支持機能だけでなく免震機能を有し、地震発生時における地上からの加速度の伝達を効率良く低減し得る免震化アウトリガ及び該免震化アウトリガを用いた走行クレーンを提供する。
【解決手段】アウトリガ本体14aとアウトリガ支持フレーム13との間に、地震発生時の水平面内におけるアウトリガ本体14aとアウトリガ支持フレーム13との間の相対変位を減衰吸収可能な水平方向変位吸収手段15を介装する。
(もっと読む)
巻上機
【課題】使用者の主観に頼ることなく、明確な寿命推測値を表示し、また、精度良く巻上機の寿命を推測する機能を備える巻上機を提供する。
【解決手段】誘導電動機によってクレーンフックの取り付けられたワイヤーロープの巻上動作及び巻下動作を行なう誘導電動機が備えられた巻上機であって、前記誘導電機にかかる前記クレーンフックで吊り上げる吊荷の荷重を電流値により判断し荷重情報を得る荷重情報取得手段と、前記吊荷の荷重ごとの運転時間を記録する運転時間記録手段と、前記吊荷の荷重ごとの運転時間から寿命を推測する寿命推測手段と、前記吊荷の荷重ごとの運転時間及び推測した寿命を出力する出力手段と、を備える。
(もっと読む)
巻上機
【課題】 特別な装置を用いることなく、精度良く荷重情報を得ることのできる機能を備えた巻上機を提供する。
【解決手段】 インバータ制御部と、前記インバータ制御部に制御される巻上用インバータ部と、前記巻上用インバータ部によって駆動させられるクレーンフックの取り付けられたワイヤーロープの巻上動作及び巻下動作を行う巻上誘導電動機と、が備えられた巻上機であって、前記巻上用インバータ部には、周波数変換を行なう駆動素子部と、回生駆動スイッチと、回生抵抗と、直流母線間電圧VDCを検知する電圧モニタ部と、が備えられ、前記インバータ制御部は、前記回生抵抗の通電率に応じて荷重を算出するという構成をとる。
(もっと読む)
クレーン
【課題】積層ゴム型免震装置の水平方向の特性を殺すことなく、当該免震装置の鉛直方向(引っ張り方向)の弱点をカバーする。
【解決手段】走行装置2にクレーン構造物3を搭載したクレーン。走行装置2上又はクレーン構造物3に、積層ゴム型免震装置4と、クレーン構造物の浮き上がりを防止する浮き上がり防止手段5と、作業時にクレーン構造物の水平方向の動きを拘束する拘束手段6と、地震発生時にクレーン構造物の拘束を解放する拘束解放手段18を設ける。
(もっと読む)
クレーンのフックブロック及びそのフックブロックを備えたクレーン並びにそのフックブロックで発電する発電方法
【課題】巻き上げ及び巻き下げにより発電して照明灯を点灯させることが可能なクレーンのフックブロック及びそのフックブロックで発電する発電方法を提供する。
【解決手段】クレーン1のフックブロック2は、シーブ7と、枠体8と、シーブ7に取り付けられたマグネット9と、マグネット9に近接するように枠体8に取り付けられたコイル10と、コイル10に誘起した交流電流を直流電流に変換するための整流器3と、整流器3により変換された直流電流にて充電される蓄電池4と、蓄電池4に接続された照明灯5と、を備える。フックブロック2を巻き上げ及び巻き下げる際のシーブ7の回転に伴うマグネット9の移動により、コイル10で誘起された交流電流は、整流器3で直流電流に変換されて蓄電池4に供給され、蓄電池4を充電する。蓄電池4に充電された電力によって適時に照明灯5を点灯させることができる。
(もっと読む)
事故防止監視制御システム
【課題】オペレータに危険距離に近いことを報知して回避させると共に、最悪の事態(接触事故)が発生した場合でも重大事故に拡大することを防止する事故防止監視制御システムを提供する。
【解決手段】この監視制御装置7は、GPS衛星5からの信号に基づいて得られたクレーン車8に係る位置情報を取得する位置情報取得手段11と、クレーン車8の所定範囲内に位置する送電線に係る情報を格納した送電線情報格納手段12と、クレーン車8に係る位置情報と送電線3に係る位置情報とを照合する照合手段13と、照合手段13による照合結果に基づいてクレーン車8と送電線3との離隔距離を判定する離隔距離判定手段14と、離隔距離判定手段14により判定された離隔距離が所定の安全距離よりも短い場合にクレーン車8に対して警報を発する警報発信手段15と、自動復旧装置の使用の可否を制御する自動復旧装置制御手段18と、を備えて構成されている。
(もっと読む)
吊荷下方の監視システム及び監視方法
【課題】吊荷の搬入作業において作業員数を削減でき、かつ、吊荷と障害物の位置関係を明確にした画像を生成することができる吊荷下方の監視システム及び監視方法を提供することを目的としている。
【解決手段】本発明の吊荷下方の監視システム10は、吊荷12の周辺をセンシングする測域センサー20と、前記吊荷12の下方を撮像する撮像手段30と、前記測域センサー20の測定領域から前記吊荷12の干渉物17を認識する認識領域を設定するセンサー制御ユニット50と、前記撮像手段30の撮像画像に吊荷モデルを形成し、前記測域センサー20の測定値に基づいて、前記吊荷モデル上に前記障害物の位置又は/及び距離情報を生成する画像処理ユニット60と、前記画像処理ユニット60で生成された処理画像を表示する表示手段70と、を備えたことを特徴としている。
(もっと読む)
61 - 80 / 204
[ Back to top ]