
Fターム[3G093CA09]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関) (4,923) | 機関回転状態 (476)
Fターム[3G093CA09]の下位に属するFターム
Fターム[3G093CA09]に分類される特許
21 - 40 / 216
ハイブリッド自動車
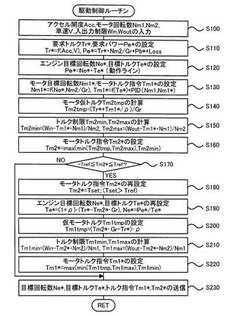
【課題】電動機に接続されたギヤ機構での異音の発生の抑制と車室内の騒音や振動の抑制との両立を図る。
【解決手段】騒音振動抑制制約運転ポイントでエンジンが運転されると共に要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する通常制御を実行するとギヤ機構を介して駆動軸に接続されたモータから出力されるトルクの絶対値が閾値Tref以下となるときには(S170)、そのモータから出力されるトルクが閾値Trefより大きなトルクTsetとなり、エンジンが騒音振動抑制制約運転ポイントより高回転低トルク側で要求パワーPe*を出力する運転ポイントで運転され、要求トルクTr*に基づくトルクが駆動軸に出力されるようエンジンと二つのモータとを制御する(S180〜S230)。
(もっと読む)
パラレル式ハイブリッド車両走行制御装置

【課題】ドライバの違和感が解消され、しかも、燃費向上の効果が大きくできるパラレル式ハイブリッド車両走行制御装置を提供する。
【解決手段】エンジン回転速度が回生下限値以上回生上限値未満で、かつ、ドライバ要求トルクと回生可能トルク最大値の加算値が好適熱効率トルク下限値を超えているとき、前記加算値がエンジン熱効率最大のトルク上限値を超えていれば、トルク上限値をエンジン目標トルクとして設定し、前記加算値がエンジン熱効率最大のトルク上限値以下であれば、前記加算値をエンジン目標トルクとして設定し、そのときのエンジン発生トルクからモータ回生トルクを取り出してバッテリ4を充電しつつ走行する充電走行を行うエネルギマネジメント部5を備える。
(もっと読む)
ハイブリッド車両システム及びその制御方法
【課題】レゾルバやその周辺回路に異常が発生したとき、代替センサであるクランク角センサの検出角度の精度(分解能)に影響しないモータ回転角の推定方法を提供し、インバータやその周辺機器の故障を招くことなく、モータ制御(弱め界磁制御)を行うことを目的とする。
【解決手段】車両駆動用のモータと、前記モータのロータ回転角を検出するレゾルバと、前記ロータ回転角情報、及びトルク指令値に基づいて前記モータを制御するモータ制御回路と、クランク軸を介して前記モータと接続されるエンジンと、前記クランク軸の回転数を検出するクランク軸センサと、を有し、前記モータ制御回路は、前記レゾルバの異常が検知された場合、前記クランク軸の回転数の変化率に基づいてロータ回転角を推定し、当該推定されたロータ回転角に基づいて弱め界磁制御をすることを特徴とする車両システムが提供される。
(もっと読む)
作業車のアクセル制御構造
【課題】停車中の指令手段の操作によるエンジン回転数の不必要な上昇を防止する。
【解決手段】定回転制御の実行中に、センサ32の出力に対応するエンジン回転数が記憶手段21Dに記憶したエンジン回転数よりも高くなると、制御手段36が、定回転制御に優先してアクセル制御を実行し、そのアクセル制御の実行中に、センサ32の出力に対応するエンジン回転数が記憶手段21Dに記憶したエンジン回転数よりも低くなると、制御手段36が、アクセル制御を終了して定回転制御を再開するように構成してある。
(もっと読む)
車両の制御装置
【課題】燃費率が悪化しない領域でオルタネータを作動させることで、オルタネータの作動領域を拡大できる車両の制御装置を提供する。
【解決手段】エンジントルクとエンジン回転数とに基づく燃費率マップと最適燃費線とを予め記憶し、エンジン駆動状態からオルタネータの非作動状態における燃費率マップ上の現状位置を推定し、推定現状位置が最適燃費線よりも低トルク領域側にある場合に、推定現状位置と最適燃費線との間のトルク差であるトルク差ΔTを求め、トルク差ΔTに応じてトルクアップ手段によりエンジントルクを増加させる。トルク差ΔTがオルタネータの最大負荷トルクTaより小さいとき、オルタネータの作動を禁止し、トルク差ΔTが前記オルタネータの最大負荷トルクTaより大きいとき、オルタネータの作動を許可する。
(もっと読む)
発電制御装置及び車両搭載用制御装置
【課題】本発明は、燃費を向上させる技術を提供することを目的とする。
【解決手段】本発明は、内燃機関20によって駆動される発電機を制御する発電制御装置を提供する。本発電制御装置は、内燃機関20が所定の回転速度で作動しているときの各サイクルにおけるクランク角毎の回転速度を表す波形である第1回転速度波形と、所定の回転速度よりも低い回転速度で内燃機関20が作動しているときの各サイクルにおけるクランク角毎の回転速度を表す波形である第2回転速度波形と、を検出する波形検出部と、第2回転速度波形が第1回転速度波形の波形に近づくように発電機に接続されている電気的負荷を操作する負荷操作部と、を備える。
(もっと読む)
エンジンの駆動装置および駆動方法
【課題】モータジェネレータの出力トルクが低下するとエンジンの出力軸回転数が増大される車両において、燃料の消費量を低減する。
【解決手段】ハイブリッド車には、エンジンおよびモータジェネレータが駆動源として搭載される。モータジェネレータの出力トルクがより緩やかに零に近づくほどより零に近い値までモータジェネレータの出力トルクが零に近づくと、エンジンの出力軸回転数が増大される。
(もっと読む)
トラクタ
【課題】二つの出力モードを有するエンジンにおいて、標準モードではトルク対応を主体とし、低燃費モードでは回転数を抑制して燃費低減を可能とする。
【解決手段】負荷が作用するとエンジン回転数が変動する第1ドループ制御と、負荷が作用すると前記第1ドループ制御よりもエンジン回転が低下し易い第2ドループ制御を設定し、前記標準モードに切り替えたときにおいては、装着した作業機を駆動するPTO駆動が入り状態ではエンジン回転数を維持するアイソクロナス制御で制御し、PTO駆動が切り状態では第1ドループ制御に自動的にガバナモードを変更する構成とし、前記低燃費モードに切り替えたときにおいては、PTO駆動が入り状態では第1ドループ制御で制御し、PTO駆動が切り状態では第2ドループ制御に自動的にガバナモードを変更するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
舶用エンジン制御装置および方法
【課題】船舶の経年変化に合わせた効率のよい主機の運転を行う。
【解決手段】船体、主機、プロペラを含む制御対象10をシミュレートするオブザーバ12を設ける。主機を制御するための制御部11からのガバナ指令uをオブザーバ12の入力とする。主機の実回転数Neをオブザーバ12にフィードバックする。オブザーバ12において推定される経年劣化前の船速Vmoをメモリ13に保存する。経年劣化後にオブザーバ12で推定される船速Vmと経年劣化前の船速Vmoの差に基づいて制御パラメータを補正する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジントルクばらつきがあるような場合でも、エンジン回転数変動を抑制しつつ所望の発電量を実現することである。
【解決手段】統合コントローラ20は、モータ回転数制御を行いつつモータジェネレータにより発電を行う場合には、min{(モータ下限トルク+エンジントルクばらつき),0}<目標発電トルク<max{(モータ上限トルク−エンジントルクばらつき),0}で示される関係式の範囲に設定する。そして、統合コントローラ20は、この関係式が成立しないことを条件に、モータ回転数制御からエンジン回転数制御に切り替える。
(もっと読む)
空気流量測定装置の劣化判定装置及び劣化判定方法
【課題】より正確にAFM3の汚損による特性劣化を判定するAFM劣化判定装置1を提供する。
【解決手段】AFM劣化判定装置1は、判定時に、内燃機関の運転状態を、空気流量が所定の流量以上となる高流量域(汚損判定可能流量域)の所定流量となる運転状態に維持して、その運転状態におけるAFM3の測定流量から測定誤差を算出し、測定誤差に基づいて特性劣化の度合を判定している。これによれば、AFM3の測定誤差によって、汚損劣化に起因する測定誤差の度合を判定することができる。
(もっと読む)
出力制限制御装置、ハイブリッド自動車および出力制限制御方法、並びにプログラム
【課題】出力制限を行いながら運転者のドライバビリティを向上させること。
【解決手段】運転者の所定の操作に応じて出力制限を解除または復帰させ、この出力制限の解除または復帰には、それぞれ所定の解除レートまたは所定の復帰レートが設定可能である出力制限制御部を有するハイブリッド自動車を構成する。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン停止要求時のエンジン回転速度に応じた適正な停止制御を実行して、エンジン回転停止制御の精度を向上させる。
【解決手段】エンジン停止要求時のエンジン回転速度が判定閾値よりも高い場合には、エンジン回転が停止するまでの期間が比較的長くなるため、オルタF/B停止制御を実行する期間を確保できると判断して、実エンジン回転挙動を目標軌道に合わせるようにオルタネータ33の負荷トルクをフィードバック制御するオルタF/B停止制御を実行する。一方、エンジン停止要求時のエンジン回転速度が判定閾値以下の場合には、エンジン回転が停止するまでの期間が比較的短くなるため、オルタF/B停止制御を実行する期間を確保できないと判断して、エンジン11の燃焼停止前に実エンジン回転挙動を目標軌道に合わせるように点火時期をフィードバック制御する点火F/B停止制御を実行する。
(もっと読む)
ハイブリッド自動車
【課題】アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にする。
【解決手段】シフトポジションSPがBポジションでアクセルオフのときに、モータMG2の回生駆動によって生じる回生電力Pm2の積算値である回生電力積算値Pm2を計算すると共に(S210,S220)、エンジンのモータリングのためにモータMG1で消費されるモータリング電力Pm1の積算値であるモータリング電力積算値Pm1sumを計算し(S230,S240)、モータリング電力積算値Pm1sumと回生電力積算値Pm2sumとの和が正の値(電力消費側の値)のときには(S270)、シフト変更提案情報をディスプレイに表示出力する(S280)。これにより、シフトポジションSPのDポジションへのシフト変更を運転者に促すことができ、アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にすることができる。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン回転停止制御が実行されたときの実エンジン回転挙動に基づいて目標軌道情報(目標軌道の算出に用いる基準回転速度とロストルクのずれ量)を学習するシステムにおいて、大気圧の変化による目標軌道の算出精度の低下を抑制する。
【解決手段】エンジン停止要求が発生したときに大気圧センサ38で大気圧を検出して、前回のエンジン停止要求時の大気圧と今回のエンジン停止要求時の大気圧との差に応じた大気圧補正量を算出し、その大気圧補正量を用いて目標軌道情報(基準回転速度とロストルクのずれ量)の学習値を補正することで、大気圧に応じて実際の目標軌道情報(目標軌道情報の真値)が変化するのに対応して、目標軌道情報の学習値を適正に補正して、目標軌道情報の学習値を真値に近付ける。この補正後の目標軌道情報の学習値を用いて目標軌道を算出することで、大気圧の変化による目標軌道の算出精度の低下を抑制する。
(もっと読む)
エンジン回転停止制御装置
【課題】エンジン回転停止制御の際に低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度とが頻繁に切り替わるハンチング現象の発生を防止する。
【解決手段】エンジン回転停止制御の際に、低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度との切り替えにヒステリシスを持たせる。具体的には、低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度との間に設定される切替判定値を含むようにヒステリシス領域を設定し、実エンジン回転速度がヒステリシス領域外の場合には実エンジン回転速度を切替判定値と比較して低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度のうちの一方を選択し、実エンジン回転速度がヒステリシス領域内の場合には低回転側の目標エンジン回転速度と高回転側の目標エンジン回転速度のうちの前回と同じ側の目標エンジン回転速度を選択する。
(もっと読む)
船舶のエンジン制御装置および方法
【課題】船舶の主機回転数を一定とする制御において、操舵による燃費の悪化を防止する。
【解決手段】制御対象10の船舶主機の回転数Neをフィードバックして、目標回転数Noとの偏差を求め制御部11に入力する。制御部11においてPID演算を行い、主機回転数Neを目標回転数Noに維持する。制御対象10において舵角を検出する。演算部12において検出される舵角に基づいてガバナ指令の補正量を算出する。算出された補正量に基づいてガバナ指令を補正する。補正は検出された舵角が大きいほどガバナ指令を大きい値とする。
(もっと読む)
車両の制御装置
【課題】アクセルペダルの急な踏み離し操作等によるアップシフト側の変速の際には、変速に伴う回転速度の低下に対して、実回転速度に対する機関圧縮比の応答遅れを抑制・回避することができる制御装置を提供する。
【解決手段】通常の運転状態では、現在の実回転速度に基づいて目標負荷追従圧縮比を算出し、これを目標圧縮比として設定し、この目標圧縮比へ向けて可変圧縮比機構を駆動制御する。但し、車両運転者により操作されるアクセル開度APOに基づいて、変速機の変速比が大から小へと変速されるアップシフトを予測したときには、アクセル開度APO等に基づいて変速後の予測変速比を予測し、この予測変速比に基づいて変速後のエンジンの予測回転速度を算出し、この予測回転速度等に基づいて目標瞬時圧縮比を算出し、これを目標圧縮比として設定する。
(もっと読む)
内燃機関の排気浄化装置
【課題】内燃機関の自動停止中における粒子状物質の堆積量を高い精度で算出する。
【解決手段】ディーゼル機関の自動停止中には、粒子状物質(PM)の単位時間当りの酸化量(PM酸化量dgpmstp)をDPF内最低温度Tdpfminに基づき算出する(ステップ220)。自動停止開始時のPMの堆積量と上記PM酸化量dgpmstpとに基づき、そのときどきのPM堆積量gpmを算出する(ステップ260)。一方で、上記PM酸化量dgpmstpを積算し(ステップ230)、そのPM酸化量積算値gpmstpが、ディーゼル機関の自動停止開始時にDPF内に残存する酸素により酸化し得る最大酸化量GPMSTPMAXを越えるときには、上記PM堆積量gpmの算出に用いられる上記PM酸化量dgpmstpを、PM酸化量積算値gpmstpが最大酸化量GPMSTPMAXを越えないように制限する(ステップ240,250)。
(もっと読む)
惰行制御装置
【課題】エンジンブレーキを確実に作動できる惰行制御装置を提供する。
【解決手段】
クラッチ回転数とアクセル開度により決定される運転状態が、アクセル開度が減少している状態で、惰行制御が可能な運転状態範囲を設定した惰行制御可能領域内になったときに、惰行制御を開始し、前記運転状態が惰行制御可能領域外になったときに、惰行制御を終了する惰行制御実行部3と、惰行制御中にアクセル開度がアクセル開放判定値以下となったときには、惰行制御を終了させるアクセル開放時惰行制御終了部4とを備える。
(もっと読む)
21 - 40 / 216
[ Back to top ]