
Fターム[3G093CB06]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 加速時 (537)
Fターム[3G093CB06]に分類される特許
21 - 40 / 537
ハイブリッド電気自動車の制御方法及び装置
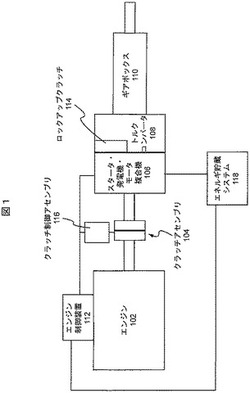
【課題】ハイブリッド電気自動車のエンジン及びスタータ・発電機・モータ複合機(ISGM)の作動方法を提供する。
【解決手段】上記方法は、発進及び減速工程を含む。ISGMは、車両の発進とエンジンの始動の双方に使用される。減速工程は、初期段階においてエンジンがISGMから解除されるように第1のクラッチを操作し、及び、略全ての回生エネルギがエネルギ貯蔵装置を再充電するための電気エネルギの唯一の供給源となるように初期段階で第2のクラッチを係合する工程を含む。
(もっと読む)
自動二輪車のトラクション制御装置

【課題】電源不足が生じても自動二輪車のトラクション制御の誤動作や中断がないようにする。
【解決手段】少なくとも前車輪速センサおよび後車輪速センサに供給するためにバッテリの出力電圧に基づいてセンサ駆動電圧を作成し、そのセンサ駆動電圧に基づくセンサ電圧またはバッテリの出力電圧に基づく電源電圧が、少なくとも前車輪速センサおよび後車輪速センサが正常に作動する電圧範囲として設定される所定電圧範囲から外れた状態では、エンジンの回転加速度に基づいて車輪スリップ状態を判断し、その判断結果に基づいて算出したエンジン制御量でエンジン出力を制御する。
(もっと読む)
車両の制御装置
【課題】運転者の加速の意図に反したトルクの抑制を抑え、ドライバビリティーの悪化を抑制することのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット2は、イグニッションスイッチ6がオンとされてからの経過時間が既定時間よりも短いことを実行条件として、強いアクセル操作時にエンジントルクを低減するトルク抑制制御を実行することで、上記経過時間が短く、車両が未だ駐車場内を走行していて、運転者が急な加速を意図したアクセル操作を行うことが余りないときに限り、トルク抑制制御を行う一方で、上記経過時間がある程度長くなり、車両が一般道を走行していることが考えられるときには、トルク抑制制御を行わず、運転者の意図に即した車両の加速が許容されるようにした。
(もっと読む)
車両の制御装置
【課題】燃料ポンプの作動を停止する制御装置の誤動作の可能性を低減し、信頼性を向上させることができる車両の制御装置を提供する。
【解決手段】車両1の制御装置は、車両1の加速度を検出する加速度センサ30,32と、加速度センサ30,32により検出された加速度に基づいてエアバッグ装置26,28を作動させるエアバッグ制御手段34と、燃料ポンプ4の作動を制御する燃料ポンプ制御手段36と、を備え、燃料ポンプ制御手段36は、エアバッグ装置26,28の作動に対して遅らせた時点での加速度に基づいて、燃料ポンプ4の作動を停止するように構成される。
(もっと読む)
ハイブリッド車の制御装置
【課題】エンジンとMG(モータジェネレータ)との間にクラッチを設けたハイブリッド車において、MGの要求トルクの低減と燃費向上を実現しながら、減速からの再加速時に車両をスムーズに加速させることができるようにする。
【解決手段】車両の走行中にブレーキが作動状態になったときに始動クラッチ18を解放すると共にエンジン11の燃焼を停止させる減速要求時制御を実行し、この減速要求時制御の実行中にブレーキの作動が解除されたときに始動クラッチ18を締結させてエンジン回転速度を引き上げるエンジン回転引上制御を実行して、車輪17の動力とMG12の動力の両方でエンジン回転速度を引き上げる。そして、エンジン回転引上制御が完了し且つ再加速要求が発生した状態になったときにエンジン11を再始動させて、再加速要求が発生した直後からエンジン11の動力とMG12の動力の両方で車両を加速させる。
(もっと読む)
車両の制御装置、車両、車両の制御方法、およびプログラム
【課題】エコラン制御中の運転者のストレスまたは故障したとの誤認識を解消させること。
【解決手段】制御装置1は、アクセル開度計算部10が調整した結果として実現されている現在のアクセル開度と車両の現在のアクセルペダルの踏み込み量から推定されるアクセル開度とを双方共に表示部15に表示させる表示制御部14を有する。この制御装置1は車両に搭載されるのが好ましい。
(もっと読む)
車両の駆動力制御装置
【課題】操舵時に運転者が感じる違和感を抑えることのできる車両の駆動力制御装置を提供する。
【解決手段】電子制御ユニット1は、エンジン6から出力される駆動力をアクセル操作量に応じた駆動力よりも低下させる駆動力抑制処理を実行する。この駆動力抑制処理が実行されているときの駆動力は、車両の操舵角が大きいときほど小さくなるように制御する。
(もっと読む)
車両の制御装置
【課題】燃料ポンプの作動を停止する制御装置の誤動作の可能性を低減し、信頼性を向上させることができる車両の制御装置を提供する。
【解決手段】車両の制御装置1は、車両の加速度を検出する加速度センサ12と、加速度センサ12により検出された加速度が所定値αより大きい時エアバッグ装置14を作動させるエアバッグ制御手段18と、燃料ポンプ8の作動を制御する燃料ポンプ制御手段20と、を備え、燃料ポンプ制御手段20は、加速度センサ12により検出された加速度に基づいて所定時間内の車両速度変化を算出する算出手段22を備え、算出手段22により算出された車両速度変化が所定値βより大きい場合に、燃料ポンプ8の作動を停止するように構成される。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
ハイブリッド自動車の制御装置、ハイブリッド自動車およびハイブリッド自動車の制御方法、並びにプログラム
【課題】加速時の燃費を改善させると共に、加速時にエンジンの出力が制限されても応答性または加速性のドライバビリティを改善させること。
【解決手段】エンジン10と電動機13とを有し、エンジン10もしくは電動機13により走行可能であり、またはエンジン10と電動機13とが協働して走行可能であり、電動機13の効率が所定値以下にならないように電動機13の最大出力を制限するハイブリッドECU18において、所定の時間内におけるアクセルペダルの踏み込み量の増加率が所定値を超えるときには、電動機13の出力制限を解除し、当該出力制限の解除により得られる電動機13のトルクとエンジン10のトルクとの和がアクセルペダルの踏み込み量に対応する要求トルクになるように制御する。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】燃費の向上と、操縦安定性および乗り心地性能との両立を図る。
【解決手段】推定した車体のバネ上挙動を構成する成分のうち、ピッチ変動成分の抑制度合いを他の成分の抑制度合いよりも高く設定した燃費向上モードと、車体のバネ上挙動を構成する成分を燃費向上モードと異なる抑制度合いで抑制するように設定した他のモードとに基づいて、車両の走行状況に対応する制駆動力の補正トルクを算出する補正トルク算出手段と、車両の走行状況に基づいて、燃費向上モードと他のモードとの少なくとも一方の重み係数を算出する重み係数算出手段と、燃費向上モードおよび他のモードの各補正トルクを、燃費向上モードと他のモードとの重みに応じて加算し、運転者の制駆動操作により定めた要求制駆動トルクに対する補正トルクの指令値を算出するトルク指令値算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両
【課題】ハイブリッド車両において、ユーザの要求に応じてスポーティー性と静粛性とをバランス良く制御する。
【解決手段】車両は、エンジンと、第2MGと、第2MGの駆動回路であるインバータと、インバータのキャリア周波数fを制御するECU800とを備える。ECU800は、第1判定部810、第2判定部820、PWM制御部830を含む。第1判定部810は、パワーモード時であるか否か(パワーモード要求の有無)を判定する。第2判定部820は、手動変速モード時であるか否か(手動変速モード要求の有無)を判定する。PWM制御部830は、手動変速モード時またはパワーモード時にはキャリア周波数fを第2MG回転速度Nm2の増加に応じて増加させる。一方、手動変速モード時でもなくかつパワーモード時でもない場合、PWM制御部830は、キャリア周波数fを非可聴領域に含まれる固定値とする。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の制御装置、車両、車両の制御方法、およびプログラム
【課題】少ない種類のパラメータによりシフトアップのタイミングを運転者に的確に伝達すること。
【解決手段】マニュアルトランスミッションを有する車両に搭載され、車両の車速に対応して予め設定されている目標加速度を、実際の加速度が超えるときには、目標加速度に実際の加速度が近付くようにアクセル開度の調整を行うアクセル開度制御部10を有する車両の制御装置1であって、アクセル開度制御部10は、車両のエンジンの回転速度が所定の値を超えるときには、目標加速度を引き下げるように制御するように構成する。
(もっと読む)
車両の制御装置
【課題】スタビリティファクタ演算式の補正を違和感やドライバビリティを損なうことなく実行する。
【解決手段】補正前の演算式で求められた駆動力の補正量と、補正後の演算式で求められた駆動力の補正量との差を算出し、その補正量の差が予め定めた判断基準値より大きいか否かを判定(ステップS15)し、補正量の差が予め定めた判断基準値より大きいことが判定された場合、スタビリティファクタを目標値に近づけるように駆動力を制御していることが判定(ステップS17)されれば、演算式の補正を禁止(リターン)し、かつ前記駆動力を制御していることが判定されなければ、演算式の補正を実行(ステップS18)する。
(もっと読む)
トラクター
【課題】本発明は、排気ガス浄化装置を取り付けた過給機付きの内燃機関で、低速回転時における加速悪化を防いで、運転フィーリングを良くすることを課題とする。
【解決手段】吸気側に過給器TBを設け、排気側にディーゼルパティキュレートフィルター46bを有する排気浄化装置46を設け、出力軸の回転に応じて燃料供給を抑制する制御を行う燃料噴射式内燃機関を搭載したトラクターにおいて、燃料供給量を変更する燃料供給量変更手段CHを設け、トラクターの運転者が前記燃料供給量変更手段CHの設定を適宜に変更可能にしたことを特徴とするトラクターとする。
(もっと読む)
車両の出力制御装置
【課題】運転者が予期していない車両の出力制御が実行されることを正確かつ迅速に防止できるようにする。
【解決手段】アクセル操作とブレーキ操作とが同時に行われたときにエンジンの出力を低下させるエンジン出力低減手段4を備え、アクセル検出手段1と、ブレーキ検出手段2と、車両を迅速に制動できる状態にあるか否かを判別する制動状態判別手段5と、上記アクセル操作とブレーキ操作とが同時に行われたことが検出された時点から上記エンジン出力低減手段4を作動させてエンジン出力を低下させるまでの作動待機時間を上記制動状態判別手段5の判別結果に応じて設定する待機時間設定手段6とを有し、上記制動状態判別手段5により車両を迅速に制動できる状態にないと判別された場合には、車両を迅速に制動できる状態にあると判別された場合に比べて作動待機時間を短くするように構成した。
(もっと読む)
運転評価装置
【課題】運転者の運転操作(走り方)を評価し、運転者に対して的確で且つきめの細かいアドバイスを簡単な構成要素で実現できるようにする。
【解決手段】コメントマトリクス表の行軸には区間燃費SctFc(t)と基準燃費StdFc(t)との燃費比SctFc(t)/StdFc(t)に応じて「S」「A」「B」「C」のランク別項目が設定され、列軸には区間走行時の加速フェーズ、巡航フェーズ、減速フェーズにおける各評価の組み合わせに対応する項目が設定されており、この行軸と列軸とで特定されるセルには、運転車の運転操作と燃費比とに対応する評価コメントが記憶されている。運転者がエンジンを停止させて運転を終了すると、コメントマトリクス表の行軸と列軸とで特定されたセルに記憶されている評価コメントが抽出されて、モニタ3に表示される(S81〜S83)。
(もっと読む)
車両の駆動装置
【課題】触媒を素早く暖機させ、且つエンジンより所望の駆動力を出力させつつ素早く触媒暖機を完了させることが可能な車両の制御装置を提供することである。
【解決手段】
車両の駆動装置であって、駆動装置は、ユーザより要求された駆動力が触媒暖機用作動中のエンジンの駆動力と蓄電器の最大許容出力との和以下の場合は触媒暖機用作動を実施するようエンジンを制御し、ユーザより要求された駆動力が触媒暖機用作動中のエンジンの駆動力と蓄電器の最大許容出力との和より大きい場合は触媒暖機用作動を中断させて走行用作動に切り換え、走行用作動中のエンジンの出力と蓄電器の最大許容出力との和によってユーザに要求された駆動力を満たし、エンジンの走行用作動中に、ユーザによる動力性能を重視した操作を検出した場合は、エンジンの指令駆動力を所定のレートで上昇させる。
(もっと読む)
車両の制御装置
【課題】アクセル操作及びブレーキ操作が同時になされている同時操作状態が解除されて出力抑制制御を停止するに際して車両走行姿勢の安定化をより高い次元で実現することのできる車両の制御装置を提供すること。
【解決手段】アクセル操作及びブレーキ操作が同時になされている同時操作状態を検出したことを条件に機関出力をアクセル開度に基づく基準出力よりも低下させる出力抑制制御を実行する(ステップS21)とともに車両走行姿勢を安定化させる姿勢安定化制御を無効化する(ステップS22)。そして、アクセル操作及びブレーキ操作のうち少なくとも一方の操作が解除されることを条件に姿勢安定化制御の無効化を解除(ステップS24)してその後に出力抑制制御を停止する(ステップS25)。
(もっと読む)
21 - 40 / 537
[ Back to top ]