
Fターム[3G093DA06]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関) (16,685) | 絞り弁開度、アクセル(スロットル)操作量 (4,502)
Fターム[3G093DA06]に分類される特許
61 - 80 / 4,502
車両制御システム及び制御装置
【課題】適正に内燃機関を始動することができる車両制御システム及び制御装置を提供することを目的とする。
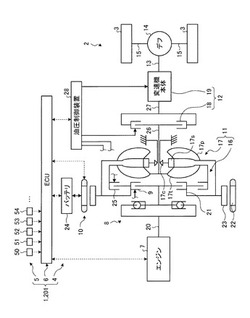
【解決手段】制御装置6は、内燃機関7、回転電機10、及び、クラッチ9を制御し、クラッチ9をスリップ状態とし回転電機10側からの動力により内燃機関7の出力軸20を回転させた後に内燃機関7の燃焼室に燃料を噴射して点火し内燃機関7を始動する第1始動制御と、内燃機関7の出力軸の回転が停止した状態で内燃機関7の燃焼室に燃料を噴射して点火し出力軸20を回転させた後にクラッチ9を介した回転電機10側からの動力により出力軸20の回転をアシストし内燃機関を始動する第2始動制御とを実行可能である。そして、制御装置6は、第2始動制御を実行する場合、油圧制御装置28を制御して、クラッチ9に供給される作動流体の圧力の元圧であるライン圧を、第1始動制御を実行する場合より高くすることを特徴とする。
(もっと読む)
エンジン制御装置およびエンジン制御方法

【課題】誤判定を防止しつつ再始動失敗を迅速に判定し、運転者に違和感を与えることなく再始動を再開することができるエンジン制御装置およびエンジン制御方法を得る。
【解決手段】再始動条件の成立後におけるエンジンの初回点火によるエンジン回転数の上昇量を演算するエンジン回転数上昇量演算部38と、エンジン回転数の上昇量に基づいて、再始動失敗判定閾値を設定する始動失敗判定クランク角変化量判定値設定部39と、再始動条件の成立後におけるエンジンの初回点火タイミングからのクランク角変化量が、エンジンが完爆したと判定されていないにも関わらず、再始動失敗判定閾値よりも大きくなった場合に、再始動失敗と判定し、エンジンの再始動を中止して、所定時間経過後にエンジンの再始動を再開する再始動失敗判定部40とを備える。
(もっと読む)
車両の制御装置および制御システム
【課題】ニュートラル制御実行時におけるクラッチ板の磨耗を抑制する。
【解決手段】ニュートラル制御実行条件が成立したと判定された場合に、クラッチ押付圧力を徐々に減少させ、その後、クラッチ係合状態判定手段74によって発進クラッチ36が所定の係合状態となったと判定された場合に、そのときのクラッチ押付圧力の値を維持する。加えてさらに、ニュートラル制御実行条件が成立したと判定された場合に、アイドル回転速度目標値を下げる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】LUクラッチおよびC1クラッチが接続状態に維持されるMGクリープカット中に、K0クラッチを接続して直噴エンジンを適切に始動できるようにする。
【解決手段】MGでクリープトルクを発生させるMGクリープモード時にブレーキ操作されると、LUクラッチ30およびC1クラッチ18を接続したままMGトルクを0とするMGクリープカットが行われるため、発進時の応答性を確保しつつバッテリー44の消耗が抑制される。MGクリープカット中にエンジン始動要求があると、LUクラッチ30を解放するとともにC1クラッチ18の係合トルクを低下させ、K0クラッチ34を係合させて、直噴エンジン12を着火始動する際にMGでアシストするため、直噴エンジン12を確実に且つ速やかに始動できる。また、着火始動で自力回転しようとするため、MGのアシストトルクが小さくて済み、バッテリー44の過放電による劣化が抑制される。
(もっと読む)
車両の制御装置
【課題】エンジン出力での走行中にドライバの加速要求に基づく目標駆動トルクが増加した場合、モータ走行時と同等の応答性を持ってドライバの要求する目標駆動トルクを実現できる車両の制御装置を提供する。
【解決手段】エンジン1で出力するエンジントルクTeを車両Mの駆動輪5を駆動する駆動トルクTvと発電機2、3を稼働する稼働トルクTgとに分配する車両の制御装置29において、ドライバの要求に基づく目標の駆動トルクTdを増加させる場合、エンジントルクTeモードライバの要求前のエンジントルクに維持しつつ稼動トルクTgの分配比率を減少させることを特徴とする車両の制御装置。
(もっと読む)
内燃機関の制御装置
【課題】駆動系の部品の重量やコストの増加を招くことなく、スリップとグリップとを繰り返すことによる駆動系部品に過大な負荷がかかることを抑制する。
【解決手段】出力軸回転数検知手段を介して検出された駆動系の出力軸回転数を用いて駆動輪9がスリップとグリップの反復を生じている状態を検知した場合に、内燃機関3の出力を低下させる制御を行う。駆動輪がスリップとグリップの反復を生じている状態を初期段階で判断して、一時的に内燃機関の出力を低下させるように制御する。
(もっと読む)
車両の制御装置
【課題】エンジン出力での走行中にドライバの加速要求に基づく目標駆動トルクが増加した場合、モータ走行時と同等の応答性を持ってドライバの要求する目標駆動トルクを実現できるハイブリッド車両のトルク制御装置を提供する。
【解決手段】 エンジン1で出力するエンジントルクTeを車両Mの駆動輪5を駆動する駆動トルクTvと発電機2、3を稼働する稼働トルクTgとに分配する車両の制御装置29において、ドライバの要求に基づく目標の駆動トルクTdを増加させる場合、エンジントルクTeをドライバの要求前のエンジントルクに維持しつつ稼動トルクTgの分配比率を減少させることを特徴とする車両の制御装置。
(もっと読む)
車両駆動装置
【課題】車両発進時の走行負荷の大小に対応してエンジンの出力回転数及び出力トルクを可変に制御することにより、常に確実かつ迅速な発進を行えるようにした車両駆動装置を提供する。
【解決手段】出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、クラッチ及び変速機を含むパワートレーンと、アクセルペダルの操作量に基づいてエンジンを制御する制御部と、を備える車両駆動装置であって、前記制御部は、車両発進時の走行負荷を推定する負荷推定手段と、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値Tmin、Nminを可変に設定する下限値設定手段と、出力回転数NEが減少して前記下限値Nminに到達したときにエンジンの出力パワーを大きく制御する(スロットルバルブの開度S1を大きな開度S2に制御する)推進力保持手段と、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EGR装置の検査にかかる時間を従来のものより短縮することができるハイブリッド車両の制御装置を提供する。
【解決手段】エンジンが発生した動力をモータジェネレータに伝達することができるハイブリッド車両の制御装置において、ハイブリッドECUは、EGR装置の検査状態にあり、エンジンの出力要求値が予め定められた規定値より大きいことを条件として(ステップS21)、出力要求値を当該規定値に決定する(ステップS22)。
(もっと読む)
ハイブリッド車両の制御装置および制御方法
【課題】前後輪の一方に動力を出力可能な内燃機関と、前後輪の他方に動力を出力可能な電動機とを備えたハイブリッド車両において、騒音の発生を抑制しつつ内燃機関の燃費向上を図ると共に、走行性能を良好に確保する。
【解決手段】燃費最適動作ライン上のエンジン要求パワーPe*に応じたエンジン22の動作点が騒音発生領域に含まれる場合、モータMG3の出力を制限すべき場合を除いて、エンジン22の目標動作点が騒音発生領域よりも低負荷側(低パワー側)の燃費最適動作ライン上の動作点(Ne1,Te1)に設定されると共に(ステップS270)、エンジン22から出力されるパワー(値P1)のエンジン要求パワーPe*に対する不足分を出力するようにモータMG3のトルク指令Tm3*が設定される(ステップS230)。
(もっと読む)
車両
【課題】エンジンの始動時に車両に振動やショックが生じるのをより適正に抑制する。
【解決手段】エンジンをクランキングするためのモータの仮トルクTm1tmpとエンジンのクランク角θcrに応じたエンジンの脈動トルクTepulとを用いてダンパの想定ねじれトルクTdasを計算し(S140)、想定ねじれトルクTdasが所定トルクTdref以下のときには仮トルクTm1tmpをモータのトルク指令Tm1*に設定し(S160)、想定ねじれトルクTdasが所定トルクTdrefより大きいときにはねじれトルクTdが所定トルクTdrefとなるようモータのトルク指令Tm1*を設定し(S170)、設定したトルク指令Tm1*がモータから出力されてエンジンがモータリングされて始動されるようエンジンとモータとを制御する(S210〜S240)。
(もっと読む)
車両制御装置及び車両システム
【課題】ドライバがパニック状態に陥ったままブレーキペダルと間違えてアクセルペダルを踏んでしまっても、駆動力を安全な領域で制御できるようにする。
【解決手段】入力された自車速情報から自車両が停止状態に遷移して良いか否かを判定する停止状態判定手段と、停止状態判定手段で停止状態に遷移しない場合、入力された自車速情報とクリープ走行情報とからクリープ走行状態に遷移して良いか否かを判定するクリープ走行判定手段と、クリープ走行判定手段でクリープ走行状態に遷移しない場合、入力された自車速情報とクリープ走行情報とアクセルペダル踏込情報から通常走行状態に遷移して良いか否かを判定する通常走行判定手段と、停止状態判定手段とクリープ走行判定手段と通常走行判定手段で判定された走行状態に基づいて、要求駆動力の算出処理方法を切り替え、要求駆動力を算出する要求駆動力算出手段と、を有する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
(もっと読む)
船舶推進機
【課題】エンジン回転速度の瞬間的な上昇に瞬時に対応することができる船舶推進機を提供する。
【解決手段】船舶推進機は、エンジンと、ドライブシャフトと、プロペラシャフトと、回転速度検出部と、制御部と、を備える。ドライブシャフトは、エンジンからの動力を伝達する。プロペラシャフトは、ドライブシャフトから伝達される動力によって回転駆動される。回転速度検出部は、エンジン回転速度を検出する。制御部は、エンジン回転速度の変化率RNが所定値r以上であるときに、エンジン回転速度を抑制する抑制制御を実行するS101。
(もっと読む)
エンジンの始動制御装置
【課題】エンジンの始動制御装置に関し、エンジン始動時における吹け上がりを抑制しつつ始動性を向上させる。
【解決手段】自動変速機26のセレクトレバーの操作位置が走行レンジであるか否かを検出する変速レンジ検出手段32を設ける。
また、エンジン10の始動時に変速レンジ検出手段32で検出された操作位置が走行レンジであるときに、操作位置が走行レンジではないときよりも、エンジン回転速度の上限値としての上限回転速度を小さく設定する第一設定手段4aを設ける。
さらに、第一設定手段4aで設定された上限回転速度を超えないように、エンジンの実回転速度を制御する上限値制御を実施する上限値制御手段5を設ける。
(もっと読む)
エンジンの制御装置
【課題】エンジンに設けられた空燃比センサを簡素な構成で精度よく基準値補正する。
【解決手段】エンジン1の排気通路16と吸気通路12とを連通する還流通路19,22と、還流通路19,22を流通する還流ガスを制御する還流ガス制御手段35bと、吸気通路12と還流通路19,22との接続部よりも下流側の吸気通路12に配設された空燃比センサ25,26とを備えたエンジンの制御装置であって、エンジン1の停止条件が成立したか否かを判定し、成立したときにエンジン1を自動停止させる自動停止制御手段35aと、停止条件が成立したと判定されたら還流ガス制御手段35bに還流ガス量を減少させ、還流ガス量が減少してから所定時間自動停止制御手段35aにエンジン1の自動停止を待機させ、エンジン1が自動停止されたら空燃比センサ25,26の基準値補正を実施する補正制御手段35cと、を有する。
(もっと読む)
駆動装置の制御装置
【課題】内燃機関に駆動連結された回転電機を利用した内燃機関の制振制御と、内燃機関の動作状態の設定によるトルクの脈動の抑制制御との関係を最適化する。
【解決手段】内燃機関11の現在の動作状態と、現在の脈動トルクとに基づいて、制振対象となる脈動トルクである制振対象脈動トルクを算出する脈動トルク算出部5と、回転電機12の現在の動作状態と、回転電機12の動作状態に関して予め設定された制振制御可能域とに基づいて、回転電機12の現在の動作状態において回転電機12が出力可能な制振トルクの最大値である出力可能制振トルクを算出する出力可能制振トルク算出部6と、制振対象脈動トルクが出力可能制振トルクよりも大きい場合、内燃機関11の仕事率を維持しつつ内燃機関11の出力トルクを低下させる方向に、内燃機関11の動作状態を変化させる内燃機関制御部3とを備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンと電動機とを備えるハイブリッド車両において、アクセルペダル戻し時に発生する歯打ち音を抑制できる制御装置を提供する。
【解決手段】アクセルペダル41の戻し時という過渡的な状況でガラ音抑制ラインLGRへの移行の必要性を判断して、ガラ音抑制ラインLGRへ移行するため、エンジン回転速度Neが低下して再度上昇させる必要もなくなり、エンジン14の応答性もよくなってガラ音抑制ラインLGRへの移行時間も短縮されるので、歯打ち音の発生を抑制することができる。
(もっと読む)
トルクベース制御装置
【課題】トルクベース制御装置に関し、エンジン始動時における吹け上がりを抑制しつつ始動性を向上させる。
【解決手段】運転者の発進意思の大きさを検出する発進意思検出手段31,33を設ける。
また、発進意思検出手段31,33で検出された発進意思が小さいほど、エンジン回転速度の上限値としての上限回転速度を小さく設定する第一設定手段4aを設ける。
また、エンジン10の実回転速度と上限回転速度との差に応じて、実回転速度の変化率の上限勾配を演算する上限勾配演算手段4dを設けるとともに、上限勾配演算手段4dで演算された上限勾配と実回転速度の実変化率との差に相当する勾配差を演算する勾配差演算手段4fを設ける。
さらに、勾配差演算手段4fで演算された勾配差をトルクに換算した値を用いて演算された目標トルクに基づき、エンジン10の実回転速度を制御する上限値制御を実施する上限値制御手段5を設ける。
(もっと読む)
エンジンの始動制御装置
【課題】エンジンの始動制御装置に関し、エンジン始動時における吹け上がりを抑制しつつ始動性を向上させる。
【解決手段】運転者の発進意思の大きさを検出する発進意思検出手段31,33を設ける。
また、発進意思検出手段31,33で検出された発進意思が小さいほど、エンジン回転速度の上限値としての上限回転速度を小さく設定する第一設定手段4aを設ける。
さらに、第一設定手段4aで設定された上限回転速度を超えないように、エンジンの実回転速度を制御する上限値制御を実施する上限値制御手段5を設ける。
(もっと読む)
61 - 80 / 4,502
[ Back to top ]