
車両駆動装置

【課題】車両発進時の走行負荷の大小に対応してエンジンの出力回転数及び出力トルクを可変に制御することにより、常に確実かつ迅速な発進を行えるようにした車両駆動装置を提供する。
【解決手段】出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、クラッチ及び変速機を含むパワートレーンと、アクセルペダルの操作量に基づいてエンジンを制御する制御部と、を備える車両駆動装置であって、前記制御部は、車両発進時の走行負荷を推定する負荷推定手段と、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値Tmin、Nminを可変に設定する下限値設定手段と、出力回転数NEが減少して前記下限値Nminに到達したときにエンジンの出力パワーを大きく制御する(スロットルバルブの開度S1を大きな開度S2に制御する)推進力保持手段と、を有する。
【解決手段】出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、クラッチ及び変速機を含むパワートレーンと、アクセルペダルの操作量に基づいてエンジンを制御する制御部と、を備える車両駆動装置であって、前記制御部は、車両発進時の走行負荷を推定する負荷推定手段と、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値Tmin、Nminを可変に設定する下限値設定手段と、出力回転数NEが減少して前記下限値Nminに到達したときにエンジンの出力パワーを大きく制御する(スロットルバルブの開度S1を大きな開度S2に制御する)推進力保持手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両駆動装置に関し、より詳細には、登坂路などで走行負荷が大きい場合にも確実に発進できる車両駆動装置に関する。
【背景技術】
【0002】
エンジン、クラッチ、及び変速機を備え、マイコンを内蔵した電子制御装置によって制御する方式の車両駆動装置が一般的になっている。この車両駆動装置では、アクセルペダルは、エンジンのスロットルバルブを操作する手段でなく、ドライバの発進及び加速の意思を電子制御装置に入力する手段として機能する。電子制御装置は、アクセルペダルの操作量を検出し、内部演算によってエンジンの出力パワーの目標値(回転数及びトルク)を設定し、スロットルバルブを制御して吸気量及び燃料供給量を調整する。また、電子制御装置は、エンジンだけでなく、クラッチ及び変速機も協調して制御し、円滑な発進や停止、加減速を行うようになっている。なお、複数の電子制御装置で機能分担して駆動制御することも一般的に行われている。
【0003】
この種の車両駆動装置を制御する一技術例が特許文献1に開示されている。特許文献1の車両の制御装置は、アクセル操作量に基づいてエンジンの目標回転速度と目標トルクとを演算する手段と、目標回転速度が得られるようにロックアップクラッチの係合力を制御する手段と、目標トルクが得られるようにエンジントルクを制御する手段とを備えている。これにより、運転者の操作に依存することなく、車両発進時の燃費向上を図ることができる、とされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−255660号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1では、アクセル操作量に基づいてエンジンの目標回転速度と目標トルクとを演算し、ロックアップクラッチ及びエンジンを制御するが、大きなトルクが必要とされる車両発進を良好に行えないおそれがある。特に、登坂路や凹凸を有する未舗装路などで走行負荷が大きいと、アクセル操作量に基づいた目標回転速度及び目標トルクでは車両推進力が不足し、クラッチの継合が進むにつれて出力回転数が減少しがちになる。そして、出力回転数がエンジンの出力トルク特性の低回転域まで落ち込むと、出力回転数の減少とともに出力トルクも減少するため車両は進まず、エンストのおそれまで生じる。
【0006】
このような現象は、走行負荷が大きいときにドライバがアクセルペダルを強く踏み込んで大きな出力トルクで車両を発進させれば回避できる。しかしながら、走行負荷の大小やアクセルペダルの操作量の大小を問わず、確実に発進できることが望ましい。換言すれば、走行負荷が大きいときの発進では、アクセルペダルの操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数及び出力トルクを設定することが望ましい。
【0007】
本発明は上記背景技術の問題点に鑑みてなされたものであり、車両発進時の走行負荷の大小に対応してエンジンの出力回転数及び出力トルクを可変に制御することにより、常に確実かつ迅速な発進を行えるようにした車両駆動装置を提供することを解決すべき課題とする。
【課題を解決するための手段】
【0008】
本発明の車両駆動装置は、出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、前記エンジンの前記出力軸に継断可能に回転連結されたクラッチ、及び前記クラッチの出力側に回転連結された変速機を含み、前記出力パワーを駆動輪まで伝達するパワートレーンと、アクセルペダルの操作量を含む車両の状態に基づいて前記エンジンの前記出力回転数及び前記出力トルクの少なくとも一方の目標値を設定し、前記目標値に出力回転数及び出力トルクの少なくとも一方が一致するように前記エンジンを制御する制御部と、を備える車両駆動装置であって、前記制御部は、車両発進時の走行負荷を推定する負荷推定手段と、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定する下限値設定手段と、前記エンジンの出力回転数及び出力トルクの少なくとも一方が減少して前記下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御する推進力保持手段と、を有する。
【0009】
さらに、前記エンジンは、吸気量を調整することにより出力軸の出力回転数及び出力トルクを可変に調整できるスロットルバルブを有し、前記推進力保持手段は、前記スロットルバルブの開度を大きく制御して前記吸気量を増加させることにより、前記エンジンの前記出力パワーを大きく制御することでもよい。
【0010】
また、前記推進力保持手段は、前記出力回転数が減少して前記出力回転数の下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御して前記出力トルクを前記下限値以上に調整することが好ましい。
【0011】
さらに、前記負荷推定手段は、車両発進時における前記エンジンの出力回転数または前記変速機の入力回転数の時間的増加の傾きが小さいほど前記走行負荷が大きいと推定することが好ましい。
【0012】
また、前記下限値設定手段は、前記アクセルペダルの操作量及び前記走行負荷をパラメータとして前記出力回転数の下限値及び前記出力トルクの下限値の少なくとも一方を設定する下限値マップを保持していてもよい。
【発明の効果】
【0013】
本発明の車両駆動装置によれば、制御部は、車両発進時の走行負荷を推定し、走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定し、出力回転数及び出力トルクの少なくとも一方が減少して下限値に到達したときに、エンジンの出力パワーを大きく制御する。したがって、登坂路などで走行負荷が大きい場合にも、アクセルペダルの操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数及び出力トルクを得て車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0014】
また、エンジンがスロットルバルブを有する態様では、スロットルバルブの開度を大きく制御して吸気量を増加させることでエンジンの出力パワーを大きく制御でき、請求項1と同様の効果が生じる。
【0015】
さらに、出力回転数が減少して下限値に到達したときに、出力トルクを下限値以上に調整する態様では、出力回転数がエンジンのトルク特性の低回転域まで落ち込んだときにも、下限値以上の出力回転数及び出力トルクを確保できる。これにより、必要とされる車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0016】
さらに、車両発進時におけるエンジンの出力回転数または変速機の入力回転数の時間的増加の傾きが小さいほど走行負荷が大きいと推定する態様では、車両に付与される加速度と極めて相関性の高い指標から走行負荷を推定する。したがって、走行負荷の推定精度が高く、出力回転数及び出力トルクの少なくとも一方の下限値を適正に設定できる。仮に、走行負荷の精度が低くて下限値を小さく設定し過ぎると、エンジンの出力パワーを大きく制御するタイミングが遅れて発進に手間取る。また、仮に下限値を大きく設定し過ぎると、エンジンの出力パワーがアクセルペダルの操作量に対応するパワーよりも極端に大きくなり、予想以上の加速度が発生してドライバビリティが低下する。
【0017】
また、下限値設定手段が下限値マップを保持している態様では、出力回転数及び出力トルクの少なくとも一方の下限値を適正に、かつ容易に設定できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態の車両駆動装置を模式的に示す構成図である。
【図2】車両発進時に走行負荷がある場合の下限値設定手段及び推進力保持手段の機能を模式的に説明するエンジンの出力トルク特性の図である。
【図3】実施形態の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。
【図4】従来技術の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。
【発明を実施するための形態】
【0019】
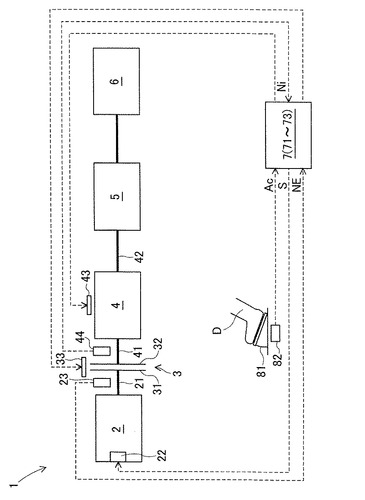
本発明を実施するための実施形態を、図1〜図4を参考にして説明する。図1は、本発明の実施形態の車両駆動装置1を模式的に示す構成図である。図中の太線はパワートレーンの経路を示し、破線の矢印は情報及び制御の流れを示している。実施形態の車両駆動装置1は、エンジン2、パワートレーンを構成するクラッチ3及び変速機4、制御部7などにより構成されている。
【0020】
エンジン2には、周知の一般的な方式・構造を有するもの、例えば、ガソリンを燃料として使用するガソリンエンジンや、軽油を燃料として使用するディーゼルエンジンなどを使用できる。エンジン2は、出力軸21、スロットルバルブ22、及び出力回転数センサ23を有している。出力軸21は、ピストンにより回転駆動されるクランク軸と一体的に回転してパワーを出力する。スロットルバルブ22は、エンジンルーム内の空気をエンジン内部に取り込む経路の途中に配設されており、その開度Sは制御部7により可変に制御される。スロットルバルブ22の開度Sが大きく制御されて吸気量が増加すると、燃料を含んだ混合気の供給量が増加し、出力軸21からの出力パワーが大きくなって出力回転数NE及び出力トルクTEが増加するようになっている。出力回転数センサ23は、出力軸21の近傍に配設されており、出力軸21の出力回転数NEを検出して検出信号を制御部7に送出する。
【0021】
クラッチ3は、エンジン2の出力軸21に継断可能に回転連結されており、本実施形態では乾式摩擦クラッチが用いられている。クラッチ3は、エンジン2の出力軸21に回転連結された駆動側部材31と、駆動側部材31に対して継合状態及び切断状態に調整される従動側部材32とを備え、クラッチアクチュエータ33により操作される。制御部7からの指令に基づいてクラッチアクチュエータ33が継合操作を行うと、駆動側部材31と従動側部材32とが摩擦摺動して伝達できるトルクが調整され、駆動側部材31と従動側部材32とが摩擦結合することで同期回転するようになっている。クラッチアクチュエータ33は、サーボモータや油圧操作機構などを用いて構成することができる。 変速機4は、クラッチ3の出力側に回転連結されており、例えば、有段自動変速機を用いることができる。変速機4は、複数の変速段をそれぞれ構成する図略の変速歯車組、及び各変速歯車組を同期結合するための図略の同期装置を備えている。変速機4は、制御部7からの指令で変速機アクチュエータ43が同期装置を駆動して、1つの変速歯車組を選択的に噛合結合させるようになっている。変速機4の入力軸41はクラッチ3の従動側部材32に回転連結され、出力軸42はデファレンシャル装置5に回転連結されている。また、入力回転数センサ44が入力軸41の近傍に配設されており、入力軸41の入力回転数Niを検出して検出信号を制御部7に送出する。
【0022】
デファレンシャル装置5の出力側は、左右一対の駆動輪6に回転連結されている。クラッチ3から変速機4及びデファレンシャル装置5を経由して駆動輪6に至る経路が、エンジン2の出力パワーを伝達するパワートレーンである。
【0023】
制御部7は、マイコンを内蔵してソフトウェアで動作する電子制御装置(ECU)により構成されている。制御部7は、アクセルペダル81の操作量を検出するアクセルセンサ82から、操作量を相対値で表したアクセル開度Acの情報を取得する。そして、制御部7は、アクセル開度Acを含む車両の状態に基づいて、エンジン2の出力回転数及び出力トルクの少なくとも一方の目標値を設定し、目標値に出力回転数NE及び出力トルクTEの少なくとも一方が一致するようにエンジン2のスロットルバルブ22の開度Sを可変に制御する。車両の状態を示す指標としては、アクセル開度Ac以外に、車速、エンジン2の出力回転数NE、変速機4の入力回転数Ni、変速機4で選択されている変速段、図略のブレーキペダルの操作量、図略のハンドルの転舵操作量などを適宜参照する。
【0024】
また、制御部7は、クラッチ3のクラッチアクチュエータ33を制御して継合動作及び切断動作を制御し、変速機4の変速機アクチュエータ43を制御して変速段の切り替え動作を制御する。さらに、制御部7は、主にソフトウェアで実現された3つの機能手段、すなわち負荷推定手段71、下限値設定手段72、及び推進力保持手段73を有しており、以下に詳述する。
【0025】
負荷推定手段71は、ドライバDがアクセルペダル81を踏み込み操作して車両を発進させるときの走行負荷を推定する手段である。負荷推定手段71は、車両発進時におけるエンジン2の出力回転数NEまたは変速機4の入力回転数Niの時間的増加の傾きが小さいほど走行負荷が大きいと推定し、走行負荷マップを用いてこの推定を行う。
【0026】
例えば、負荷推定手段71は、変速機4の入力回転数Niを一定の時間間隔で取得し、毎回の増加分を演算する。この演算は、入力回転数Niの増加率を求めることを意味し、車両の加速度と極めて相関性の高い指標を求めることに相当する。周知のように、一定の出力トルクTEが発生しているときに、車両に付与される加速度が小さいほど走行負荷は大きい。そこで、エンジン2のスロットルバルブ22の開度S及び入力回転数Niの時間的増加の傾きをパラメータとして走行負荷を推定する走行負荷マップを予め作成し、制御部7内に保持しておく。スロットルバルブ22の開度Sは、エンジン2の出力トルクTEを支配するパラメータであり、間接的に出力トルクTEをパラメータにしていることになる。そして、負荷推定手段71は、走行負荷マップを用いて走行負荷を推定する。
【0027】
なお、変速機4の入力回転数Niに代えてエンジン2の出力回転数NEを用いても、同様に負荷推定手段71を構成できるが、クラッチ3の状態を加味する必要が生じる。さらに、負荷推定手段71は上述の構成に限定されず、代替手段として図略の車輪速センサの検出情報から加速度を推定したり、加速度センサを設けて加速度を直接測定したりしても、走行負荷を推定できる。
【0028】
下限値設定手段72は、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値Nmin、Tminを可変に設定する手段である。ここで、走行負荷はエンジン2の出力トルクTEに抗して車両に付与される加速度を減じるように作用するので、定性的には走行負荷が大きいほど出力トルクの下限値Tminを大きく設定する。定量的には、走行負荷をパラメータとして出力トルクの下限値Tminを可変に設定するトルク下限値マップを予め作成して制御部7内に保持しておき、下限値設定手段72はこのマップを用いて下限値Tminを設定する。
【0029】
また、下限値設定手段72は、エンジン2の出力トルク特性を参照して出力回転数の下限値Nminを設定する。詳述すると、エンジン2の出力トルク特性は、エンジン2を制御する際に参照する基本的特性であり、制御部7は、例えば一覧表形式のマップの形態で出力トルク特性を保持している。一般的に、出力トルク特性は、スロットルバルブ22の開度Sをパラメータとして、横軸の出力回転数NEと縦軸の出力トルクTEとの関係を示すグラフで示される。エンジン2の出力トルク特性は、出力回転数NEの中庸回転域NMで出力トルクTEが最も大きく、低回転域NL及び高回転域NHで出力トルクTEが漸減する山状の特性カーブを有している。
【0030】
ここで、出力トルク特性の高回転域NHでは、出力回転数NEが減少するにつれて出力トルクTEが増加する。したがって、車両発進時に走行負荷があって一時的に加速度が落ちても、出力トルクTEが維持されて安定した発進を行える可能性が残されている。ところが、出力トルク特性の低回転域NLでは、出力回転数NEが減少するにつれて出力トルクTEも減少する。したがって、車両発進時に走行負荷があって一時的に加速度が落ちると、出力トルクTEも減少して車速が低下する一方になり、安定した発進は期待できずエンストのおそれまで生じる。このような事態を避けるため、出力回転数の下限値Nminは、出力トルク特性の山状の特性カーブが低回転域NLまで落ち込む手前、あるいは低回転域NLの初期の段階に設定する。
【0031】
ところで、エンジン2の出力トルク特性の山状のカーブの形状や位置はスロットルバルブ22の開度Sに依存して変化し、前述した低回転域NLの範囲も変化する。また、スロットルバルブ22の開度Sは、後述する推進力保持手段73が機能する以前は、アクセルペダル81のアクセル開度Acに対応付けて制御される。したがって、アクセルペダル81のアクセル開度Acをパラメータとして出力回転数の下限値Nminを可変に設定する回転数下限値マップを予め作成して制御部7内に保持しておき、下限値設定手段72はこのマップを用いて下限値Nminを設定する。
【0032】
推進力保持手段73は、エンジン2の出力回転数NE及び出力トルクTEの少なくとも一方が減少して下限値Nmin、Tminに到達したときに、エンジン2の出力パワーを大きく制御する手段であり、具体的にはスロットルバルブ22の開度Sを大きく制御する手段である。さらに、推進力保持手段73は、出力回転数NEが減少して下限値Nminに到達したときに、スロットルバルブ22の開度Sを大きく制御して、出力トルクTEを下限値Tmin以上に調整する。補足すると、推進力保持手段73は、アクセルペダル81のアクセル開度Acが一定であっても、車両推進力を確保するために必要に応じてスロットルバルブ22の開度Sを大きく制御する。
【0033】
図2は、車両発進時に走行負荷がある場合の下限値設定手段72及び推進力保持手段73の機能を模式的に説明するエンジン2の出力トルク特性の図である。詳細には、図2の(1)は下限値設定手段72による出力トルクの下限値Tminの設定を示し、(2)は走行負荷があるときのエンジン2の動作点の推移を示し、(3)は下限値設定手段72による出力回転数の下限値Nminの設定及び推進力保持手段73によるスロットルバルブ22の開度Sの制御とエンジン2の動作点の推移を示している。
【0034】
図2の(1)で、負荷推定手段71が車両発進時の走行負荷を推定すると、下限値設定手段72はトルク下限値マップを用いて走行負荷に対応した出力トルクの下限値Tminを設定する。また、図2の(2)に示されるように、車両発進時のアクセルペダル81のアクセル開度Acに対応付けられたスロットルバルブ22の開度S1でエンジン2が動作すると、出力トルクTEは下限値Tminよりも小さい。このため、車両推進力が不足し、エンジン2の動作点は、開度S1の山状のカーブ特性の高回転域NHの動作点P1から、中庸回転域NMの動作点P2、動作点P3を経て低回転域NLの手前の動作点P4まで移動する。結果として、車速が減少するとともに出力トルクTEも減少し、放置すれば矢印P5で示されるように動作点がさらに低回転側に移動してエンストになるおそれが生じる。
【0035】
これに対し、図2の(3)に示されるように、下限値設定手段72は、回転数下限値マップを用いて出力回転数の下限値Nminを低回転域NLの手前の動作点P4付近に設定する。すると、エンジン2の出力回転数NEが減少して動作点P4に到達したときに、推進力保持手段73がスロットルバルブ22の開度S1を大きく制御する。さらに、推進力保持手段73は、実際の出力トルクTEが出力トルクの下限値Tminになるように、スロットルバルブ22の開度S2に制御する。これにより、エンジン2の動作点は、開度S1上の動作点P4から開度S2上の動作点P6に移動し、出力トルクの下限値Tminが満足されて車両推進力が確保される。この後、車両に加速度が付与されて車速が増加し、矢印P7で示されるように、エンジン2の動作点は開度S2上の高回転側へと移動する。
【0036】
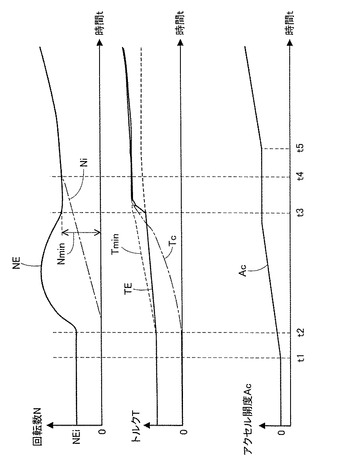
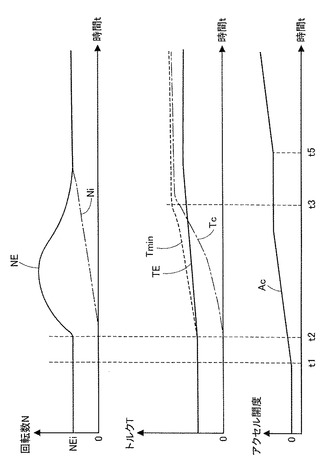
次に、実施形態の車両駆動装置1の動作について、従来技術と比較して説明する。図3は、実施形態の車両駆動装置1で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。また、図4は、従来技術の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。図3及び図4で、上段は回転数N、中段はトルクT、下段はアクセル開度Acを示し、横軸は共通の時間tである。
【0037】
実施形態を示す図3において、時刻t1でアクセルペダル81の踏み込み操作が開始されると車両発進の制御が開始され、下段に示されるようにアクセル開度Acが徐々に増加する。そして、エンジン2及びクラッチ3の応答時間だけ遅れた時刻t2で、実質的なエンジン2の出力パワーの増加及びクラッチの継合動作が始まる。すなわち、上段に示されるエンジン2の出力回転数NE(実線示)がアイドル回転数NEiから急激に増加し、中段の出力トルクTE(実線示)が漸増する。また、クラッチ3の継合動作が徐々に進んで中段に示されるように伝達できるトルクTc(一点鎖線示)が漸増するとともに、トルクTcの伝達によって変速機4の入力軸41が回転駆動され、上段に示される入力回転数Ni(一点鎖線示)も漸増する。
【0038】
アクセル開度Acが徐々に増加している時間帯で、負荷推定手段71及び下限値設定手段72によって出力トルクの下限値Tmin(破線示)及び出力回転数の下限値Nminが可変に設定される。この例では、走行負荷があるため、エンジン2の出力トルクTEは下限値Tminに対して不足している。時刻t3で、アクセル開度Acの増加は止まり、クラッチ3で伝達できるトルクTcは大きくなって継合動作は概ね終了している。
【0039】
そしてこの時刻t3で、エンジン2の出力回転数NEが下限値Nminまで減少し、推進力保持手段73が動作する。つまり、図2の(3)の動作点P4から動作点P6に移動することに相当して、スロットルバルブ22の開度Sが大きく調整され、出力トルクTEが急峻に増加して下限値Tminに等しくなる。以降、エンジン2の出力トルクTEと、クラッチ3で伝達できるトルクTcとは概ね一致して変化する。また、時刻t4でエンジン2の出力回転数NEと変速機4の入力回転数Niとが一致して同期回転する。これにより、必要とされる車両推進力を確保でき、確実かつ迅速な発進を行える。その後、時刻t5でアクセルペダル81がさらに踏み込み操作されると、回転数NE、Ni及びトルクTE、Tcは安定して増加し、安定した加速性能が得られる。
【0040】
一方、従来技術を示す図4において同様の車両発進の制御を実施した場合に、時刻t3以前は、下限値Tmin、Nminの設定を除いて同じ制御が行われる。そして、時刻t3で、アクセル開度Acの増加が止まり、クラッチ3の継合動作が概ね終了しても、スロットルバルブ22の開度Sの調整は行われない。このため、時刻t3以降も出力トルクの下限値Tminに対して出力トルクTEが不足している状態が解消されない。結果として、回転数NE、Niが増加せず、必要とされる車両推進力を確保できず、確実かつ迅速な発進を行ええない。さらに、時刻t5でアクセルペダル81がさらに踏み込み操作されても、回転数NE、Ni及びトルクTE、Tcの増加が緩慢であり、安定した加速性能が得られない。
【0041】
実施形態の車両駆動装置1によれば、車両発進時の走行負荷に応じてエンジン2の出力トルクの下限値Tminを設定し、アクセルペダル81のアクセル開度Acに応じてエンジン2の出力回転数の下限値Nminを設定する。そして、出力回転数NEが減少して下限値Nminに到達したときに、出力トルクTEを下限値Tminに調整するように、エンジン2のスロットルバルブ22の開度Sを大きく制御する。したがって、登坂路などで走行負荷が大きい場合にも、アクセルペダル81の操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数NE及び出力トルクTEを得て車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0042】
さらに、車両発進時における変速機4の入力回転数Niの時間的増加の傾き、すなわち、車両に付与される加速度と極めて相関性の高い指標から走行負荷を推定している。したがって、走行負荷の推定精度が高く、出力回転数及NE及び出力トルクNTの下限値Tmin、Nminを適正に設定でき、発進に手間取ったりドライバビリティが低下したりすることがない。
【0043】
また、下限値設定手段72がトルク下限値マップ及び回転数下限値マップを保持しているので、下限値Tmin、Nminを適正に、かつ容易に設定できる。
【0044】
なお、負荷推定手段71による走行負荷の推定方法や、下限値設定手段72による下限値Tmin、Nminの設定方法は、上述の実施形態に限定されない。その他、本発明は様々な応用や変形が可能である。
【符号の説明】
【0045】
1:車両駆動装置
2:エンジン 21:出力軸 22:スロットルバルブ 23:出力回転数センサ
3:クラッチ
31:駆動側部材 32:従動側部材 33:クラッチアクチュエータ
4:変速機
41:入力軸 42:出力軸 43:変速機アクチュエータ
44:入力回転数センサ
5:デファレンシャル装置
6:駆動輪
7:制御部 71:負荷推定手段 72:下限値設定手段 73:推進力保持手段
81:アクセルペダル 82:アクセルセンサ
Ac:アクセル開度 S、S1、S2:スロットルバルブの開度
NE:エンジンの出力回転数 Ni:変速機の入力回転数
TE:エンジンの出力トルク Tc:クラッチで伝達できるトルク
Nmin:出力回転数の下限値 Tmin:出力トルクの下限値
【技術分野】
【0001】
本発明は車両駆動装置に関し、より詳細には、登坂路などで走行負荷が大きい場合にも確実に発進できる車両駆動装置に関する。
【背景技術】
【0002】
エンジン、クラッチ、及び変速機を備え、マイコンを内蔵した電子制御装置によって制御する方式の車両駆動装置が一般的になっている。この車両駆動装置では、アクセルペダルは、エンジンのスロットルバルブを操作する手段でなく、ドライバの発進及び加速の意思を電子制御装置に入力する手段として機能する。電子制御装置は、アクセルペダルの操作量を検出し、内部演算によってエンジンの出力パワーの目標値(回転数及びトルク)を設定し、スロットルバルブを制御して吸気量及び燃料供給量を調整する。また、電子制御装置は、エンジンだけでなく、クラッチ及び変速機も協調して制御し、円滑な発進や停止、加減速を行うようになっている。なお、複数の電子制御装置で機能分担して駆動制御することも一般的に行われている。
【0003】
この種の車両駆動装置を制御する一技術例が特許文献1に開示されている。特許文献1の車両の制御装置は、アクセル操作量に基づいてエンジンの目標回転速度と目標トルクとを演算する手段と、目標回転速度が得られるようにロックアップクラッチの係合力を制御する手段と、目標トルクが得られるようにエンジントルクを制御する手段とを備えている。これにより、運転者の操作に依存することなく、車両発進時の燃費向上を図ることができる、とされている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−255660号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1では、アクセル操作量に基づいてエンジンの目標回転速度と目標トルクとを演算し、ロックアップクラッチ及びエンジンを制御するが、大きなトルクが必要とされる車両発進を良好に行えないおそれがある。特に、登坂路や凹凸を有する未舗装路などで走行負荷が大きいと、アクセル操作量に基づいた目標回転速度及び目標トルクでは車両推進力が不足し、クラッチの継合が進むにつれて出力回転数が減少しがちになる。そして、出力回転数がエンジンの出力トルク特性の低回転域まで落ち込むと、出力回転数の減少とともに出力トルクも減少するため車両は進まず、エンストのおそれまで生じる。
【0006】
このような現象は、走行負荷が大きいときにドライバがアクセルペダルを強く踏み込んで大きな出力トルクで車両を発進させれば回避できる。しかしながら、走行負荷の大小やアクセルペダルの操作量の大小を問わず、確実に発進できることが望ましい。換言すれば、走行負荷が大きいときの発進では、アクセルペダルの操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数及び出力トルクを設定することが望ましい。
【0007】
本発明は上記背景技術の問題点に鑑みてなされたものであり、車両発進時の走行負荷の大小に対応してエンジンの出力回転数及び出力トルクを可変に制御することにより、常に確実かつ迅速な発進を行えるようにした車両駆動装置を提供することを解決すべき課題とする。
【課題を解決するための手段】
【0008】
本発明の車両駆動装置は、出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、前記エンジンの前記出力軸に継断可能に回転連結されたクラッチ、及び前記クラッチの出力側に回転連結された変速機を含み、前記出力パワーを駆動輪まで伝達するパワートレーンと、アクセルペダルの操作量を含む車両の状態に基づいて前記エンジンの前記出力回転数及び前記出力トルクの少なくとも一方の目標値を設定し、前記目標値に出力回転数及び出力トルクの少なくとも一方が一致するように前記エンジンを制御する制御部と、を備える車両駆動装置であって、前記制御部は、車両発進時の走行負荷を推定する負荷推定手段と、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定する下限値設定手段と、前記エンジンの出力回転数及び出力トルクの少なくとも一方が減少して前記下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御する推進力保持手段と、を有する。
【0009】
さらに、前記エンジンは、吸気量を調整することにより出力軸の出力回転数及び出力トルクを可変に調整できるスロットルバルブを有し、前記推進力保持手段は、前記スロットルバルブの開度を大きく制御して前記吸気量を増加させることにより、前記エンジンの前記出力パワーを大きく制御することでもよい。
【0010】
また、前記推進力保持手段は、前記出力回転数が減少して前記出力回転数の下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御して前記出力トルクを前記下限値以上に調整することが好ましい。
【0011】
さらに、前記負荷推定手段は、車両発進時における前記エンジンの出力回転数または前記変速機の入力回転数の時間的増加の傾きが小さいほど前記走行負荷が大きいと推定することが好ましい。
【0012】
また、前記下限値設定手段は、前記アクセルペダルの操作量及び前記走行負荷をパラメータとして前記出力回転数の下限値及び前記出力トルクの下限値の少なくとも一方を設定する下限値マップを保持していてもよい。
【発明の効果】
【0013】
本発明の車両駆動装置によれば、制御部は、車両発進時の走行負荷を推定し、走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定し、出力回転数及び出力トルクの少なくとも一方が減少して下限値に到達したときに、エンジンの出力パワーを大きく制御する。したがって、登坂路などで走行負荷が大きい場合にも、アクセルペダルの操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数及び出力トルクを得て車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0014】
また、エンジンがスロットルバルブを有する態様では、スロットルバルブの開度を大きく制御して吸気量を増加させることでエンジンの出力パワーを大きく制御でき、請求項1と同様の効果が生じる。
【0015】
さらに、出力回転数が減少して下限値に到達したときに、出力トルクを下限値以上に調整する態様では、出力回転数がエンジンのトルク特性の低回転域まで落ち込んだときにも、下限値以上の出力回転数及び出力トルクを確保できる。これにより、必要とされる車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0016】
さらに、車両発進時におけるエンジンの出力回転数または変速機の入力回転数の時間的増加の傾きが小さいほど走行負荷が大きいと推定する態様では、車両に付与される加速度と極めて相関性の高い指標から走行負荷を推定する。したがって、走行負荷の推定精度が高く、出力回転数及び出力トルクの少なくとも一方の下限値を適正に設定できる。仮に、走行負荷の精度が低くて下限値を小さく設定し過ぎると、エンジンの出力パワーを大きく制御するタイミングが遅れて発進に手間取る。また、仮に下限値を大きく設定し過ぎると、エンジンの出力パワーがアクセルペダルの操作量に対応するパワーよりも極端に大きくなり、予想以上の加速度が発生してドライバビリティが低下する。
【0017】
また、下限値設定手段が下限値マップを保持している態様では、出力回転数及び出力トルクの少なくとも一方の下限値を適正に、かつ容易に設定できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態の車両駆動装置を模式的に示す構成図である。
【図2】車両発進時に走行負荷がある場合の下限値設定手段及び推進力保持手段の機能を模式的に説明するエンジンの出力トルク特性の図である。
【図3】実施形態の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。
【図4】従来技術の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。
【発明を実施するための形態】
【0019】
本発明を実施するための実施形態を、図1〜図4を参考にして説明する。図1は、本発明の実施形態の車両駆動装置1を模式的に示す構成図である。図中の太線はパワートレーンの経路を示し、破線の矢印は情報及び制御の流れを示している。実施形態の車両駆動装置1は、エンジン2、パワートレーンを構成するクラッチ3及び変速機4、制御部7などにより構成されている。
【0020】
エンジン2には、周知の一般的な方式・構造を有するもの、例えば、ガソリンを燃料として使用するガソリンエンジンや、軽油を燃料として使用するディーゼルエンジンなどを使用できる。エンジン2は、出力軸21、スロットルバルブ22、及び出力回転数センサ23を有している。出力軸21は、ピストンにより回転駆動されるクランク軸と一体的に回転してパワーを出力する。スロットルバルブ22は、エンジンルーム内の空気をエンジン内部に取り込む経路の途中に配設されており、その開度Sは制御部7により可変に制御される。スロットルバルブ22の開度Sが大きく制御されて吸気量が増加すると、燃料を含んだ混合気の供給量が増加し、出力軸21からの出力パワーが大きくなって出力回転数NE及び出力トルクTEが増加するようになっている。出力回転数センサ23は、出力軸21の近傍に配設されており、出力軸21の出力回転数NEを検出して検出信号を制御部7に送出する。
【0021】
クラッチ3は、エンジン2の出力軸21に継断可能に回転連結されており、本実施形態では乾式摩擦クラッチが用いられている。クラッチ3は、エンジン2の出力軸21に回転連結された駆動側部材31と、駆動側部材31に対して継合状態及び切断状態に調整される従動側部材32とを備え、クラッチアクチュエータ33により操作される。制御部7からの指令に基づいてクラッチアクチュエータ33が継合操作を行うと、駆動側部材31と従動側部材32とが摩擦摺動して伝達できるトルクが調整され、駆動側部材31と従動側部材32とが摩擦結合することで同期回転するようになっている。クラッチアクチュエータ33は、サーボモータや油圧操作機構などを用いて構成することができる。 変速機4は、クラッチ3の出力側に回転連結されており、例えば、有段自動変速機を用いることができる。変速機4は、複数の変速段をそれぞれ構成する図略の変速歯車組、及び各変速歯車組を同期結合するための図略の同期装置を備えている。変速機4は、制御部7からの指令で変速機アクチュエータ43が同期装置を駆動して、1つの変速歯車組を選択的に噛合結合させるようになっている。変速機4の入力軸41はクラッチ3の従動側部材32に回転連結され、出力軸42はデファレンシャル装置5に回転連結されている。また、入力回転数センサ44が入力軸41の近傍に配設されており、入力軸41の入力回転数Niを検出して検出信号を制御部7に送出する。
【0022】
デファレンシャル装置5の出力側は、左右一対の駆動輪6に回転連結されている。クラッチ3から変速機4及びデファレンシャル装置5を経由して駆動輪6に至る経路が、エンジン2の出力パワーを伝達するパワートレーンである。
【0023】
制御部7は、マイコンを内蔵してソフトウェアで動作する電子制御装置(ECU)により構成されている。制御部7は、アクセルペダル81の操作量を検出するアクセルセンサ82から、操作量を相対値で表したアクセル開度Acの情報を取得する。そして、制御部7は、アクセル開度Acを含む車両の状態に基づいて、エンジン2の出力回転数及び出力トルクの少なくとも一方の目標値を設定し、目標値に出力回転数NE及び出力トルクTEの少なくとも一方が一致するようにエンジン2のスロットルバルブ22の開度Sを可変に制御する。車両の状態を示す指標としては、アクセル開度Ac以外に、車速、エンジン2の出力回転数NE、変速機4の入力回転数Ni、変速機4で選択されている変速段、図略のブレーキペダルの操作量、図略のハンドルの転舵操作量などを適宜参照する。
【0024】
また、制御部7は、クラッチ3のクラッチアクチュエータ33を制御して継合動作及び切断動作を制御し、変速機4の変速機アクチュエータ43を制御して変速段の切り替え動作を制御する。さらに、制御部7は、主にソフトウェアで実現された3つの機能手段、すなわち負荷推定手段71、下限値設定手段72、及び推進力保持手段73を有しており、以下に詳述する。
【0025】
負荷推定手段71は、ドライバDがアクセルペダル81を踏み込み操作して車両を発進させるときの走行負荷を推定する手段である。負荷推定手段71は、車両発進時におけるエンジン2の出力回転数NEまたは変速機4の入力回転数Niの時間的増加の傾きが小さいほど走行負荷が大きいと推定し、走行負荷マップを用いてこの推定を行う。
【0026】
例えば、負荷推定手段71は、変速機4の入力回転数Niを一定の時間間隔で取得し、毎回の増加分を演算する。この演算は、入力回転数Niの増加率を求めることを意味し、車両の加速度と極めて相関性の高い指標を求めることに相当する。周知のように、一定の出力トルクTEが発生しているときに、車両に付与される加速度が小さいほど走行負荷は大きい。そこで、エンジン2のスロットルバルブ22の開度S及び入力回転数Niの時間的増加の傾きをパラメータとして走行負荷を推定する走行負荷マップを予め作成し、制御部7内に保持しておく。スロットルバルブ22の開度Sは、エンジン2の出力トルクTEを支配するパラメータであり、間接的に出力トルクTEをパラメータにしていることになる。そして、負荷推定手段71は、走行負荷マップを用いて走行負荷を推定する。
【0027】
なお、変速機4の入力回転数Niに代えてエンジン2の出力回転数NEを用いても、同様に負荷推定手段71を構成できるが、クラッチ3の状態を加味する必要が生じる。さらに、負荷推定手段71は上述の構成に限定されず、代替手段として図略の車輪速センサの検出情報から加速度を推定したり、加速度センサを設けて加速度を直接測定したりしても、走行負荷を推定できる。
【0028】
下限値設定手段72は、推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値Nmin、Tminを可変に設定する手段である。ここで、走行負荷はエンジン2の出力トルクTEに抗して車両に付与される加速度を減じるように作用するので、定性的には走行負荷が大きいほど出力トルクの下限値Tminを大きく設定する。定量的には、走行負荷をパラメータとして出力トルクの下限値Tminを可変に設定するトルク下限値マップを予め作成して制御部7内に保持しておき、下限値設定手段72はこのマップを用いて下限値Tminを設定する。
【0029】
また、下限値設定手段72は、エンジン2の出力トルク特性を参照して出力回転数の下限値Nminを設定する。詳述すると、エンジン2の出力トルク特性は、エンジン2を制御する際に参照する基本的特性であり、制御部7は、例えば一覧表形式のマップの形態で出力トルク特性を保持している。一般的に、出力トルク特性は、スロットルバルブ22の開度Sをパラメータとして、横軸の出力回転数NEと縦軸の出力トルクTEとの関係を示すグラフで示される。エンジン2の出力トルク特性は、出力回転数NEの中庸回転域NMで出力トルクTEが最も大きく、低回転域NL及び高回転域NHで出力トルクTEが漸減する山状の特性カーブを有している。
【0030】
ここで、出力トルク特性の高回転域NHでは、出力回転数NEが減少するにつれて出力トルクTEが増加する。したがって、車両発進時に走行負荷があって一時的に加速度が落ちても、出力トルクTEが維持されて安定した発進を行える可能性が残されている。ところが、出力トルク特性の低回転域NLでは、出力回転数NEが減少するにつれて出力トルクTEも減少する。したがって、車両発進時に走行負荷があって一時的に加速度が落ちると、出力トルクTEも減少して車速が低下する一方になり、安定した発進は期待できずエンストのおそれまで生じる。このような事態を避けるため、出力回転数の下限値Nminは、出力トルク特性の山状の特性カーブが低回転域NLまで落ち込む手前、あるいは低回転域NLの初期の段階に設定する。
【0031】
ところで、エンジン2の出力トルク特性の山状のカーブの形状や位置はスロットルバルブ22の開度Sに依存して変化し、前述した低回転域NLの範囲も変化する。また、スロットルバルブ22の開度Sは、後述する推進力保持手段73が機能する以前は、アクセルペダル81のアクセル開度Acに対応付けて制御される。したがって、アクセルペダル81のアクセル開度Acをパラメータとして出力回転数の下限値Nminを可変に設定する回転数下限値マップを予め作成して制御部7内に保持しておき、下限値設定手段72はこのマップを用いて下限値Nminを設定する。
【0032】
推進力保持手段73は、エンジン2の出力回転数NE及び出力トルクTEの少なくとも一方が減少して下限値Nmin、Tminに到達したときに、エンジン2の出力パワーを大きく制御する手段であり、具体的にはスロットルバルブ22の開度Sを大きく制御する手段である。さらに、推進力保持手段73は、出力回転数NEが減少して下限値Nminに到達したときに、スロットルバルブ22の開度Sを大きく制御して、出力トルクTEを下限値Tmin以上に調整する。補足すると、推進力保持手段73は、アクセルペダル81のアクセル開度Acが一定であっても、車両推進力を確保するために必要に応じてスロットルバルブ22の開度Sを大きく制御する。
【0033】
図2は、車両発進時に走行負荷がある場合の下限値設定手段72及び推進力保持手段73の機能を模式的に説明するエンジン2の出力トルク特性の図である。詳細には、図2の(1)は下限値設定手段72による出力トルクの下限値Tminの設定を示し、(2)は走行負荷があるときのエンジン2の動作点の推移を示し、(3)は下限値設定手段72による出力回転数の下限値Nminの設定及び推進力保持手段73によるスロットルバルブ22の開度Sの制御とエンジン2の動作点の推移を示している。
【0034】
図2の(1)で、負荷推定手段71が車両発進時の走行負荷を推定すると、下限値設定手段72はトルク下限値マップを用いて走行負荷に対応した出力トルクの下限値Tminを設定する。また、図2の(2)に示されるように、車両発進時のアクセルペダル81のアクセル開度Acに対応付けられたスロットルバルブ22の開度S1でエンジン2が動作すると、出力トルクTEは下限値Tminよりも小さい。このため、車両推進力が不足し、エンジン2の動作点は、開度S1の山状のカーブ特性の高回転域NHの動作点P1から、中庸回転域NMの動作点P2、動作点P3を経て低回転域NLの手前の動作点P4まで移動する。結果として、車速が減少するとともに出力トルクTEも減少し、放置すれば矢印P5で示されるように動作点がさらに低回転側に移動してエンストになるおそれが生じる。
【0035】
これに対し、図2の(3)に示されるように、下限値設定手段72は、回転数下限値マップを用いて出力回転数の下限値Nminを低回転域NLの手前の動作点P4付近に設定する。すると、エンジン2の出力回転数NEが減少して動作点P4に到達したときに、推進力保持手段73がスロットルバルブ22の開度S1を大きく制御する。さらに、推進力保持手段73は、実際の出力トルクTEが出力トルクの下限値Tminになるように、スロットルバルブ22の開度S2に制御する。これにより、エンジン2の動作点は、開度S1上の動作点P4から開度S2上の動作点P6に移動し、出力トルクの下限値Tminが満足されて車両推進力が確保される。この後、車両に加速度が付与されて車速が増加し、矢印P7で示されるように、エンジン2の動作点は開度S2上の高回転側へと移動する。
【0036】
次に、実施形態の車両駆動装置1の動作について、従来技術と比較して説明する。図3は、実施形態の車両駆動装置1で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。また、図4は、従来技術の車両駆動装置で車両発進時に走行負荷があるときの動作を説明するタイムチャートである。図3及び図4で、上段は回転数N、中段はトルクT、下段はアクセル開度Acを示し、横軸は共通の時間tである。
【0037】
実施形態を示す図3において、時刻t1でアクセルペダル81の踏み込み操作が開始されると車両発進の制御が開始され、下段に示されるようにアクセル開度Acが徐々に増加する。そして、エンジン2及びクラッチ3の応答時間だけ遅れた時刻t2で、実質的なエンジン2の出力パワーの増加及びクラッチの継合動作が始まる。すなわち、上段に示されるエンジン2の出力回転数NE(実線示)がアイドル回転数NEiから急激に増加し、中段の出力トルクTE(実線示)が漸増する。また、クラッチ3の継合動作が徐々に進んで中段に示されるように伝達できるトルクTc(一点鎖線示)が漸増するとともに、トルクTcの伝達によって変速機4の入力軸41が回転駆動され、上段に示される入力回転数Ni(一点鎖線示)も漸増する。
【0038】
アクセル開度Acが徐々に増加している時間帯で、負荷推定手段71及び下限値設定手段72によって出力トルクの下限値Tmin(破線示)及び出力回転数の下限値Nminが可変に設定される。この例では、走行負荷があるため、エンジン2の出力トルクTEは下限値Tminに対して不足している。時刻t3で、アクセル開度Acの増加は止まり、クラッチ3で伝達できるトルクTcは大きくなって継合動作は概ね終了している。
【0039】
そしてこの時刻t3で、エンジン2の出力回転数NEが下限値Nminまで減少し、推進力保持手段73が動作する。つまり、図2の(3)の動作点P4から動作点P6に移動することに相当して、スロットルバルブ22の開度Sが大きく調整され、出力トルクTEが急峻に増加して下限値Tminに等しくなる。以降、エンジン2の出力トルクTEと、クラッチ3で伝達できるトルクTcとは概ね一致して変化する。また、時刻t4でエンジン2の出力回転数NEと変速機4の入力回転数Niとが一致して同期回転する。これにより、必要とされる車両推進力を確保でき、確実かつ迅速な発進を行える。その後、時刻t5でアクセルペダル81がさらに踏み込み操作されると、回転数NE、Ni及びトルクTE、Tcは安定して増加し、安定した加速性能が得られる。
【0040】
一方、従来技術を示す図4において同様の車両発進の制御を実施した場合に、時刻t3以前は、下限値Tmin、Nminの設定を除いて同じ制御が行われる。そして、時刻t3で、アクセル開度Acの増加が止まり、クラッチ3の継合動作が概ね終了しても、スロットルバルブ22の開度Sの調整は行われない。このため、時刻t3以降も出力トルクの下限値Tminに対して出力トルクTEが不足している状態が解消されない。結果として、回転数NE、Niが増加せず、必要とされる車両推進力を確保できず、確実かつ迅速な発進を行ええない。さらに、時刻t5でアクセルペダル81がさらに踏み込み操作されても、回転数NE、Ni及びトルクTE、Tcの増加が緩慢であり、安定した加速性能が得られない。
【0041】
実施形態の車両駆動装置1によれば、車両発進時の走行負荷に応じてエンジン2の出力トルクの下限値Tminを設定し、アクセルペダル81のアクセル開度Acに応じてエンジン2の出力回転数の下限値Nminを設定する。そして、出力回転数NEが減少して下限値Nminに到達したときに、出力トルクTEを下限値Tminに調整するように、エンジン2のスロットルバルブ22の開度Sを大きく制御する。したがって、登坂路などで走行負荷が大きい場合にも、アクセルペダル81の操作量に制約されずに、走行負荷に十分対応できるだけの出力回転数NE及び出力トルクTEを得て車両推進力を確保でき、常に確実かつ迅速な発進を行える。
【0042】
さらに、車両発進時における変速機4の入力回転数Niの時間的増加の傾き、すなわち、車両に付与される加速度と極めて相関性の高い指標から走行負荷を推定している。したがって、走行負荷の推定精度が高く、出力回転数及NE及び出力トルクNTの下限値Tmin、Nminを適正に設定でき、発進に手間取ったりドライバビリティが低下したりすることがない。
【0043】
また、下限値設定手段72がトルク下限値マップ及び回転数下限値マップを保持しているので、下限値Tmin、Nminを適正に、かつ容易に設定できる。
【0044】
なお、負荷推定手段71による走行負荷の推定方法や、下限値設定手段72による下限値Tmin、Nminの設定方法は、上述の実施形態に限定されない。その他、本発明は様々な応用や変形が可能である。
【符号の説明】
【0045】
1:車両駆動装置
2:エンジン 21:出力軸 22:スロットルバルブ 23:出力回転数センサ
3:クラッチ
31:駆動側部材 32:従動側部材 33:クラッチアクチュエータ
4:変速機
41:入力軸 42:出力軸 43:変速機アクチュエータ
44:入力回転数センサ
5:デファレンシャル装置
6:駆動輪
7:制御部 71:負荷推定手段 72:下限値設定手段 73:推進力保持手段
81:アクセルペダル 82:アクセルセンサ
Ac:アクセル開度 S、S1、S2:スロットルバルブの開度
NE:エンジンの出力回転数 Ni:変速機の入力回転数
TE:エンジンの出力トルク Tc:クラッチで伝達できるトルク
Nmin:出力回転数の下限値 Tmin:出力トルクの下限値
【特許請求の範囲】
【請求項1】
出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、
前記エンジンの前記出力軸に継断可能に回転連結されたクラッチ、及び前記クラッチの出力側に回転連結された変速機を含み、前記出力パワーを駆動輪まで伝達するパワートレーンと、
アクセルペダルの操作量を含む車両の状態に基づいて前記エンジンの前記出力回転数及び前記出力トルクの少なくとも一方の目標値を設定し、前記目標値に出力回転数及び出力トルクの少なくとも一方が一致するように前記エンジンを制御する制御部と、を備える車両駆動装置であって、
前記制御部は、
車両発進時の走行負荷を推定する負荷推定手段と、
推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定する下限値設定手段と、
前記エンジンの出力回転数及び出力トルクの少なくとも一方が減少して前記下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御する推進力保持手段と、
を有する車両駆動装置。
【請求項2】
前記エンジンは、吸気量を調整することにより出力軸の出力回転数及び出力トルクを可変に調整できるスロットルバルブを有し、
前記推進力保持手段は、前記スロットルバルブの開度を大きく制御して前記吸気量を増加させることにより、前記エンジンの前記出力パワーを大きく制御する請求項1に記載の車両駆動装置。
【請求項3】
前記推進力保持手段は、前記出力回転数が減少して前記出力回転数の下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御して前記出力トルクを前記下限値以上に調整する請求項1または2に記載の車両駆動装置。
【請求項4】
前記負荷推定手段は、車両発進時における前記エンジンの出力回転数または前記変速機の入力回転数の時間的増加の傾きが小さいほど前記走行負荷が大きいと推定する請求項1〜3のいずれか一項に記載の車両駆動装置。
【請求項5】
前記下限値設定手段は、前記アクセルペダルの操作量及び前記走行負荷をパラメータとして前記出力回転数の下限値及び前記出力トルクの下限値の少なくとも一方を設定する下限値マップを保持している請求項1〜4のいずれか一項に記載の車両駆動装置。
【請求項1】
出力パワーを制御することで出力軸の出力回転数及び出力トルクを可変に調整できるエンジンと、
前記エンジンの前記出力軸に継断可能に回転連結されたクラッチ、及び前記クラッチの出力側に回転連結された変速機を含み、前記出力パワーを駆動輪まで伝達するパワートレーンと、
アクセルペダルの操作量を含む車両の状態に基づいて前記エンジンの前記出力回転数及び前記出力トルクの少なくとも一方の目標値を設定し、前記目標値に出力回転数及び出力トルクの少なくとも一方が一致するように前記エンジンを制御する制御部と、を備える車両駆動装置であって、
前記制御部は、
車両発進時の走行負荷を推定する負荷推定手段と、
推定した走行負荷に対応する車両推進力を得るために必要となる出力回転数及び出力トルクの少なくとも一方の下限値を可変に設定する下限値設定手段と、
前記エンジンの出力回転数及び出力トルクの少なくとも一方が減少して前記下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御する推進力保持手段と、
を有する車両駆動装置。
【請求項2】
前記エンジンは、吸気量を調整することにより出力軸の出力回転数及び出力トルクを可変に調整できるスロットルバルブを有し、
前記推進力保持手段は、前記スロットルバルブの開度を大きく制御して前記吸気量を増加させることにより、前記エンジンの前記出力パワーを大きく制御する請求項1に記載の車両駆動装置。
【請求項3】
前記推進力保持手段は、前記出力回転数が減少して前記出力回転数の下限値に到達したときに、前記エンジンの前記出力パワーを大きく制御して前記出力トルクを前記下限値以上に調整する請求項1または2に記載の車両駆動装置。
【請求項4】
前記負荷推定手段は、車両発進時における前記エンジンの出力回転数または前記変速機の入力回転数の時間的増加の傾きが小さいほど前記走行負荷が大きいと推定する請求項1〜3のいずれか一項に記載の車両駆動装置。
【請求項5】
前記下限値設定手段は、前記アクセルペダルの操作量及び前記走行負荷をパラメータとして前記出力回転数の下限値及び前記出力トルクの下限値の少なくとも一方を設定する下限値マップを保持している請求項1〜4のいずれか一項に記載の車両駆動装置。
【図1】


【図2】

【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−91333(P2013−91333A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−232730(P2011−232730)
【出願日】平成23年10月24日(2011.10.24)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月24日(2011.10.24)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]