
Fターム[4C601GA18]の内容
Fターム[4C601GA18]に分類される特許
61 - 80 / 291
超音波診断装置
【課題】 同一画面に表示された他の診断装置のリファレンス像と超音波像の対応関係の把握を容易にする。
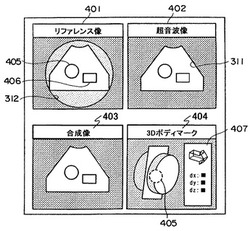
【解決手段】 超音波探触子104から出力される反射エコー信号から超音波像を構成する超音波像算出部105と、予め画像診断装置102で撮像されたボリューム画像データを記憶するボリューム画像データ記憶部107と、記憶されているボリューム画像データから超音波像のスキャン面に対応したリファレンス像を再構成するリファレンス像算出部111と、超音波像とリファレンス像とを表示するモニタ114とを有する超音波診断装置において、モニタは、ボリューム画像データ中の任意の部位に設定されたターゲット405を示す画像を超音波像402に表示する。
(もっと読む)
医用画像表示装置及び医用画像誘導方法

【課題】医用撮像マーカーを使用することなく、患者位置と画像位置との位置合わせを行なう。
【解決手段】被検体301の医用画像を撮像する医用画像撮像装置13と、表示装置6と、被検体の位置情報を検出するための被検体位置検出具311と、撮像装置位置検出具312と、被検体位置検出具と撮像装置位置検出具のそれぞれの位置情報を計測する三次元位置計測装置15と、被検体の位置情報と医用画像の位置情報の位置合わせを行う医用画像表示装置1とを備え、医用画像表示装置は、医用画像に付されたDICOM情報の医用画像座標系C5と被検体位置検出座標系C2を、撮像装置座標系C3及び撮像空間座標系C4と三次元位置計測座標系C1を介して座標変換する同次座標変換行列T5を算出して、被検体の位置情報と医用画像の位置情報の位置合わせ情報として用いる。
(もっと読む)
改良された軟部組織の超音波歪測定のための方法及び装置
【課題】エラストグラフィ測定を改善し、歪又は物質特性及び初期応力の直接測定を取得するために、生体組織等の軟部組織内の音響特性の変動を、歪の関数としてモデル化し、生体組織内の歪を測定する方法を提供する。
【解決手段】生体組織内の歪を測定する方法であって、
入射超音波波形を前記組織内に送信し、該組織から反射超音波波形を取得すること、反射係数を求めるために、前記の反射超音波波形および入射超音波波形の大きさを比較すること、及び(i)前記組織の歪及び(ii)前記組織の物質定数のうちの一方を、該組織の歪及び該組織の物質定数のうちの他方がわかっているときに求めるために、前記反射係数を、前記生体組織の数学的モデルに適用することを含む、生体組織内の歪を測定する方法
(もっと読む)
超音波診断システム、超音波診断装置用ロボット、及びプログラム
【課題】超音波プローブの位置や姿勢が所望の超音波画像が得られる最適状態から変化したときに、当該最適状態に超音波プローブを迅速に戻すことを可能にする。
【解決手段】本発明の超音波診断システム10は、超音波プローブ14と、超音波プローブ14からの信号により超音波画像を生成する超音波画像生成手段15と、超音波プローブ14を動作させるロボットアーム17と、所定範囲内で予め超音波プローブ14を移動させた際に、当該移動中の各位置での超音波画像を記憶画像20Aとして記憶する記憶手段20と、現在得られている現画像Nと各記憶画像20Aとの対比により、目標画像Tが得られる超音波プローブ14の最適位置及び最適姿勢に対する変化量を求めるプローブ状態変化量検出手段21と、プローブ状態変化量検出手段21で求めた変化量がゼロになるようにロボットアーム17の動作制御を行う動作制御手段22とを備えている。
(もっと読む)
超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム
【課題】 例えば診断部位が変形等する場合等であっても、現実の診断部位と超音波画像との対応を容易且つ迅速に把握することができる超音波診断装置を提供すること。
【解決手段】 超音波プローブと、診断部位に設けられた第1の検出装置から受信する第1の情報に基づいて、診断部位の形状を検出すると共に、超音波プローブに設けられた第2の検出装置から受信する第2の情報に基づいて、診断部位に対する走査断面の位置を検出する検出ユニットと、検出された形状を有する診断部位を模擬的に映像化した三次元コンピュータグラフィックスを生成すると共に、診断部位に対する走査断面の位置に基づいて、三次元コンピュータグラフィックスから走査断面に対応する支援画像を生成する支援画像生成ユニットと、超音波プローブによって受信された反射波に基づいて、走査断面に関する超音波画像を生成する超音波画像生成ユニットと、を具備する。
(もっと読む)
超音波診断装置及びその制御プログラム
【課題】造影剤が投与された被検体の超音波画像と超音波画像以外の医用画像における造影剤による画像の変化を一画面で好適に観察することができる超音波診断装置を提供する。
【解決手段】造影剤が投与された被検体の超音波画像UGとして造影画像CGを表示させるとともに、造影剤が投与された被検体について予め取得された超音波画像以外の医用画像としてX線CT画像XGを表示させる表示画像制御部であって、前記造影画像CGと同一断面について対応する時相のX線CT画像XGを表示させる表示画像制御部を備えることを特徴とする。
(もっと読む)
光音響波測定装置
【課題】光音響波測定装置において被測定対象の移動があっても正確な画像再構成を行うための技術を提供する。
【解決手段】光を照射されると音響波を発生するマーカが複数配置された被測定対象の表面を撮影する画像取得手段と、撮影された画像からマーカの初期配置状況を求めるマーカ初期配置状況算出手段と、光をマーカが配置された被測定対象に照射して発生する音響波を測定して音響データに変換する探触子と、音響データに基づき、測定時のマーカ配置状況を求める測定時マーカ配置状況算出手段と、マーカ初期配置状況と測定時マーカ配置状況を比較し、画像データを生成する際の音響データの補正量を算出する、音響データ補正量算出手段と、音響データの補正量に基づき、取得した音響データを再配置する取得音響データ再配置手段を有する光音響波測定装置を用いる。
(もっと読む)
穿刺支援システム
【課題】 簡単な操作でターゲットに穿刺針を自動的に到達させること。
【解決手段】 穿刺支援システム10は、超音波診断装置11によって取得した超音波断層画像に基づき、穿刺針Nを動作させてターゲットTに穿刺を行う穿刺支援ロボット12を備えている。穿刺支援ロボット12は、プローブ15の位置及び姿勢を検出するためのマーカ24及び3次元運動計測装置25と、プローブ15の位置及び姿勢に、そのときのプローブ15から得られた超音波断層画像を対応させることで、対象組織P内に設定されたターゲットTの3次元位置を求める3次元位置検出手段41と、穿刺針Nを動作させる穿刺針動作装置22と、3次元位置検出手段41で検出されたターゲットTの3次元位置に基づき、ターゲットTに穿刺針Nが到達するように、穿刺針動作装置22の動作を制御する動作制御手段42とを備えている。
(もっと読む)
超音波プローブアダプタ、超音波診断システムおよび超音波診断装置
【課題】超音波診断装置において、超音波ビーム走査の空間的条件を容易に検出することを目的とする。
【解決手段】超音波プローブアダプタ12は、超音波を送受信する超音波プローブと超音波診断対象の生体との間に介在し、超音波プローブを移動可能にしつつ支持する。超音波プローブアダプタ12は、生体が接触する生体接触面および当該生体接触面に対向し超音波プローブが接触するプローブ接触面を有する。また、超音波プローブアダプタ12内で延伸する領域を占める超音波反射マーカ38を備える。超音波診断装置は、超音波プローブを生体接触面上で移動させつつ繰り返し一次元走査を行う。超音波診断装置は、繰り返し行われた一次元走査による各断層画像データに基づいて生体の像を示すボリュームデータを生成する。
(もっと読む)
解剖構造データセットの位置合わせ装置及び方法
【課題】空間情報がない場合に、解剖構造の一つのボリュームデータセットを同解剖構造の別のボリュームデータセットに関連させる方法及びシステムを提供する。
【解決手段】画像慣性モーメントなどのボリュームデータセットの一意空間特性が識別され、ボリュームデータセットに任意基準フレームが付加され、一意空間特性と相関される。追加空間情報も任意基準フレームと相関される。そして追加空間情報は、一意空間特性に基づき第一及び第二ボリュームデータセットを位置合わせすることにより解剖構造の第二ボリュームデータセットに相関される。本方法とシステムでは定義済みの目標に基づく局部基準フレームを設定せずに同じ解剖構造の異なったボリュームデータセットの位置合わせが可能となり、追加空間情報の転写が可能となる。
(もっと読む)
超音波診断装置及びその制御プログラム
【課題】造影画像の観察に支障をきたすことなく、断面を容易に確認することができる超音波診断装置を提供する。
【解決手段】造影画像HGを表示させる造影画像表示制御部と、前記造影画像HGに設定された所定の領域R内に、被検体内における造影剤に関わりなく被検体の断面を特定可能な断面特定画像として、Bモード画像BGを表示させるBモード画像表示制御部と、を備えることを特徴とする。領域Rには、Bモード画像BGの代わりに、カラードプラ画像、パワードプラ画像、Bフロー画像を表示してもよい。
(もっと読む)
超音波診断装置
【課題】弾性画像の撮影において、操作者の熟練度に関係なく、適切な弾性画像を得るための圧力付与、解放を可能とし、操作者の個人差による弾性画像に差が生じることのない超音波診断装置を提供する。
【解決手段】超音波探触子は被検体内に超音波信号を送受する配列された複数の圧電素子と、前記複数の圧電素子の配列方向と同方向に配列され、前記被検体との当接圧を検知する複数の圧力検知手段を有し、超音波診断装置は、前記圧力検知手段で検知された複数の圧力の情報を表示する。
(もっと読む)
超音波探触子及びそれを用いた超音波診断装置
【課題】超音波探触子の3次元位置検出手段を着脱自在に超音波探触子に装着可能にすると共に、超音波探触子に位置検出手段を収容しても超音波探触子の操作性が低下することのない超音波探触子及びそのような超音波探触子を用いた超音波診断装置を提供する。
【解決手段】超音波探触子は、被検体に超音波を送受波する振動子部と、振動子部を固定する探触子ヘッド部と、探触子ヘッド部に連結するグリップ部と、を備え、グリップ部は、超音波探触子の3次元位置情報を検出するための位置検出手段を取り外し可能に収容するための溝を有して成る。
(もっと読む)
超音波診断装置
【課題】超音波診断装置に関する発明を開示する。
【解決手段】開示された超音波診断装置は、帯状に形成されて検査対象物に巻かれる連結部と、前記連結部上に設けられ、前記連結部の長手方向に沿って移動するプローブを有する移動部とを備えることを特徴とする。
(もっと読む)
超音波診断装置
【課題】同一断面について生体組織が同一形状の超音波画像と医用画像とを表示することができる超音波診断装置を提供する。
【解決手段】超音波プローブの位置を検出する位置センサの位置検出情報に基づいて、所定の点を原点とする三次元空間の座標系におけるエコーデータの位置を算出する位置算出部と、MRI装置において予め取得されたMRI画像における生体組織の形状を前記エコーデータに基づく超音波画像における生体組織の形状に変形する変形演算を行なう変形演算部と、前記三次元空間の座標系である超音波画像の座標系と前記MRI画像の座標系との間の座標変換を行なって、同一断面について、前記変形演算によって得られたデータに基づく形状変形済みMRI画像MG′と前記超音波画像UGとをともに表示部6に表示する表示画像制御部と、を備えることを特徴とする。
(もっと読む)
超音波診断装置
【課題】複数フレーム分のエコーデータの位置合わせを行なう場合において、少ない演算量でしかも正確な位置合わせを行なうことができる超音波診断装置を提供する。
【解決手段】被検体に対して超音波を送信してエコーを受信する超音波プローブと、この超音波プローブの位置を検出するための位置センサと、この位置センサの検出情報に基づいて、エコーデータの位置を算出する位置算出部51と、前記エコーデータの位置情報と複数フレーム分のエコーデータの相関とに基づいて、複数フレーム分のエコーデータの位置合わせ処理を行なう位置合わせ処理部52と、を備えることを特徴とする。
(もっと読む)
超音波診断システム及び超音波診断・治療システム
【課題】既存の超音波画像形成装置を活用して臓器等の立体画像を形成し、また治療用超音波を照射対象へ容易に合わせ込むことができる、したがって非侵襲でありながら正確な診断と治療ができる、超音波診断システム及び超音波診断・治療システムを提供する。
【解決手段】超音波画像形成装置が出力する超音波断層画像から輪郭を抽出した後、プローブの三次元座標情報に基づいて輪郭データを仮想三次元空間内に配置する。輪郭データを複数取得して補間演算を実施すると、仮想三次元空間内に臓器の三次元画像を形成できる。また、トランスデューサと超音波照射対象との配置状態を仮想三次元空間で表示するだけでなく、トランスデューサの焦点と超音波照射対象との距離を測距画像で視覚的に示すことで、合焦作業が極めて簡易になり、医師の治療行為を大幅に助けることができるのみならず、治療の精度を大幅に改善する。
(もっと読む)
超音波診断装置
【課題】
被検体内部の立体画像生成精度をあげるために、超音波探触子の三次元座標を算出する必要がある。このため、超音波探触子の三次元座標を算出する方法として、電磁波を利用した超音波探触子の三次元座標を算出する超音波診断装置が開発されている。しかしながら、磁場は周囲環境の影響を受けやすく、正確な超音波探触子の三次元座標の算出が難しく、従って被検体内部の立体画像の生成の精度が落ちてしまっていた。
【解決手段】
本発明は、既知の位置に設置された撮像装置を用いて超音波探触子を撮像し、複数の二次元画像を取得する。
前記撮像された複数の二次元画像から、二次元座標情報を抽出し、かつ各撮像装置の設置位置座標との相関関係から、前記超音波探触子の三次元座標および角度を算出する。
このように、周囲環境の変化に強い超音波探触子の立体画像を利用することにより、より正確な被検体内部の立体画像を生成することができるようになる。
(もっと読む)
処置システムの焦点に対するターゲットの位置の検出および可視化を行う方法および装置
【課題】焦点に対するターゲットの位置の検出および可視化の操作を容易にする。
【解決手段】空間内を可動であり、処置システム3とは機械的に独立しており、リモート位置検出システム15によって位置が検出される超音波プローブ6を構成する工程、第一に、前記ターゲットの像が表された超音波画像と、第二に、前記超音波プローブ6の前記位置と、の同時記録を行う工程、前記ターゲットCの仮想の位置を決定するために、前記記録された超音波画像において、前記ターゲットの像の位置を選択する工程、第一に、前記リモート位置検出システム15の手段によって前記焦点F2の位置を、第二に、前記ターゲットおよび/または前記処置システム3を移動させる手段の位置を、同時に決定する工程、前記ターゲットCの仮想の位置を前記焦点F2に一致させるために、前記移動手段の移動値を計算する工程を含む。
(もっと読む)
超音波診断装置及び関心領域設定用制御プログラム
【課題】先行する3次元画像データに対して設定された関心領域を新たに収集された3次元画像データに対して自動設定する。
【解決手段】超音波プローブ21を被検体150の体表面に沿って移動させることにより時系列的な3次元画像データを収集する際、位置座標処理部4は、関心領域が自動設定される現在時刻toに先行する時刻tmにて収集された3次元画像データImの検査対象部位に対し入力部7が設定した関心領域Rmの位置座標を超音波プローブ21の位置情報に基づいて変換処理することにより、現在時刻toにて収集された3次元画像データIoにおける位置座標を算出する。次いで、表示部6は、画像データ生成部3から供給された3次元画像データIoの前記位置座標に関心領域Rmを重畳することにより3次元画像データIoに対する関心領域Rmの自動設定を行なう。
(もっと読む)
61 - 80 / 291
[ Back to top ]