
Fターム[5C054CH01]の内容
閉回路テレビジョンシステム (47,623) | 撮像タイミング制御 (2,048) | 連続撮影 (716)
Fターム[5C054CH01]に分類される特許
21 - 40 / 716
自位置特定システム、自位置特定プログラム及び自位置特定方法
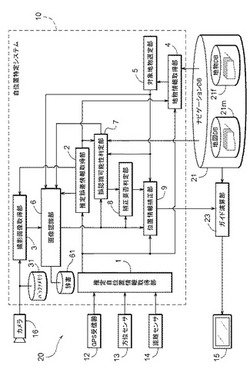
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
監視装置及びプログラム

【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
監視装置およびプログラム
【課題】 ストリーミング配信された監視画像の同期再生を行う際に、ボトルネックカメラ画像が存在している場合には、そのボトルネックカメラ画像への対策を講じることのできる監視装置を提供する。
【解決手段】 監視装置2は、カメラ5で撮影した監視画像が記録されている画像記録装置3と接続されており、画像記録装置3からストリーミング配信される複数の監視画像を同期再生によって表示する。監視装置2は、ストリーミング配信される複数の監視画像の各々が記憶部18の受信バッファに蓄積されるときのデータ蓄積速度を算出して、データ蓄積速度が所定のしきい値以下である監視画像をボトルネックカメラ画像として検出し、ボトルネックカメラ画像に関する通知メッセージを表示部12に表示する。
(もっと読む)
情報提供装置、システム、方法及びプログラム
【課題】有用な情報提供サービスを実現できる情報提供装置が求められる。
【解決手段】本実施形態によれば、情報提供装置は、映像取得部と、画像認識部と、カメラ追尾制御部と、表示制御部とを備えた構成である。映像取得部は、カメラから目標物体の映像データを取得する。画像認識部は、前記映像データに基づいて指定された目標物体を認識する。カメラ追尾制御部は、前記画像認識結果に基づいて、前記カメラを前記指定の目標物体に追尾させる。表示制御部は、前記指定の目標物体に追尾している前記カメラから取得される映像データを表示装置に出力する。
(もっと読む)
監視システム
【課題】検出機能が限定されない監視カメラを備える監視システムを提供することを目的とする。
【解決手段】監視対象領域を撮影し、撮影した画像を送信するカメラ100とカメラ100より受信した画像から監視対象領域における検出対象を検出し、検出結果を送信するサーバ200とを備える。カメラ100は、撮影した画像を保持するメモリ4と、サーバ200が検出対象を検出するために用いる画像に関する情報である検出画像情報に従って、撮影した画像を変換する画像変換部3と、画像変換部3で変換された変換後画像をサーバ200に送信するカメラ送信部8とを有する。サーバ200は、検出画像情報をカメラ100に通知する検出画像情報通知部16と、登録情報に基づいて、カメラ送信部8から送信された変換後画像における検出対象の有無を検出する検出部14と、検出部14で検出した検出結果をカメラ100に送信する検出結果通知部17とを有する。
(もっと読む)
監視カメラシステム
【課題】公共施設等の屋内外には多数の監視用のカメラが設置され、これらの映像は、それぞれの監視システムによって記録、管理されている。この場合、いくつかのシステムに分散記録されている監視対象移動体の映像を検索、集約するためには多大な労力と時間を必要としていた。
【解決手段】監視用のカメラの映像を伝送する無線伝送装置と、当該無線装置から監視対象移動体に装着された携帯型の映像記録装置に伝送し、該映像記録装置にカメラの映像を記録するようにする。
(もっと読む)
車線認識装置及び車線認識方法
【課題】ノイズを区画線と判断する誤りを低減する技術を提供する。
【解決手段】車線認識装置は、時系列的な複数の原画像を入力する。その原画像の各々に対して、路上に描かれた区画線の候補となる候補位置が検出され、区画線候補位置履歴として蓄積される。時系列的な複数の原画像を合成することによって合成鳥瞰画像が作成される。所定の時点での合成鳥瞰画像の候補位置を中心として、区間線候補位置履歴が最も多数蓄積されている方向が、区画線が描かれている可能性が高い領域として推定される。より正確な区画線候補を狙った探索領域を設定することにより、ノイズを除外できる。
(もっと読む)
周辺監視装置
【課題】処理負荷を軽減しつつ広い範囲の障害物を検出する「周辺監視装置」を提供する。
【解決手段】カメラ撮影範囲に障害物が存在しない場合には、主監視領域220については15フレーム/秒の画像フレームを用いた障害物の検出を行い、他の領域については10フレーム/秒の画像フレームを用いた障害物の検出を行う(a)。主監視領域220に写り込む範囲に障害物が存在する場合には、主監視領域220についてのみ30フレーム/秒の画像フレームを用いた障害物の検出を行う(b)。主監視領域220外の領域に写り込む範囲にのみ障害物が存在する場合には、最も近い障害物が写り込んでいる領域及びその周辺を含むように着目領域300を設定し、着目領域については15フレーム/秒の画像フレームを用いた障害物の検出を行い、他の領域については10フレーム/秒の画像フレームを用いた障害物の検出を行う(c)。
(もっと読む)
画像記録装置及びドライブレコーダシステム
【課題】記録された画像ファイルのサムネイルの表示を高速化できる情報を記録する画像記録装置を提供する。
【解決手段】
画像情報取得手段100は、複数の画像フレームと画像フレームに対する差分フレームとを時系列順に取得し、画像情報記録手段170が画像フレーム及び差分フレームを画像情報として記録手段30に記録するときに、画像情報から前記画像フレームを特定するための特定情報50を前記記録手段30に記録する特定情報記録手段を備える。
(もっと読む)
並走体検出装置及び並走体検出方法
【課題】並走体の位置検出精度について向上を図ることが可能な並走体検出装置及び方法を提供する。
【解決手段】並走体検出装置1は、カメラ10にて得られた自車両Vの後側方側の異なる時刻の検出領域の画像を、鳥瞰視上で位置を合わせると共に、位置合わせされた異なる時刻の画像データの差分画像データに基づいて、並走体と地面との境界となる接地線を検出する計算機50を備えている。また、計算機50は、差分画像データに対して自車両Vの移動方向と略平行な複数の線をそれぞれ異なる位置に設定し、差分画像データのうち、設定した略平行な複数の線それぞれの自車両Vの遠方側におけるデータに対し、検出領域の画像を鳥瞰視に視点変換した際に並走体が倒れ込む方向に沿って、所定の差分を示す画素数をカウントして度数分布化することで複数の差分波形を生成し、生成した複数の差分波形の形状変化から並走体の接地線を検出する。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
車両用周辺監視装置、車両用周辺監視装置の表示方法およびプログラム
【課題】車両周辺の監視状態の確認を容易にすることができる車両用周辺監視装置、車両用周辺監視装置の表示方法およびプログラムを提供する。
【解決手段】車両の周辺における情報を取得する取得部11,12,13と、車両の状態に係る情報を表示する表示領域を有する車両情報表示部31と、取得部11,12,13の動作状態を表す虚像を、車両の運転者から見て、車両情報表示部31における表示領域の少なくとも一部と重なる位置に表示する虚像表示部33と、が設けられ、制御部40は、車両情報表示部31に対して虚像と重なる表示領域に対する光の照明等を中止させると共に、虚像表示部33により虚像を表示させる。これにより車両の始動時に、運転者が上述の虚像を視認する際に、表示領域が邪魔になることがない。さらに、上述の虚像の周囲が暗くなり虚像の表示が強調されるため、運転者は上述の虚像を視認しやすくなる。
(もっと読む)
不審物体判断装置、不審物体判断方法、及び、不審物体判断プログラム
【課題】不審者の侵入を検出したい窓などにおいて、不審者を検出するための専用のセンサを取り付ける必要なくドア以外の場所から侵入してきた不審者を判断することのできる不審者判断装置を提供する。
【解決手段】人204を観測装置101により検出し、人の検出履歴を人検出履歴データベース102に記憶し、人を初めて検出した観測値を初回検出観測値推定手段103により推定し、部屋201における入口としてのドア位置と、初回検出観測値推定手段にて推定された初めて人を検出した位置とを比較して人が不審者か否かを判断する。
(もっと読む)
画像監視装置
【課題】現在表示している撮像画像上に監視部の監視範囲を再現することにより、監視者が監視場所の状況を迅速に把握しうることを目的とする。
【解決手段】撮像部と、監視部と、場所モデルと監視条件情報と撮像条件情報とを記憶した記憶部と、画像処理部と、表示部とを備えた画像監視装置であって、画像処理部は、監視条件情報と場所モデルとを用いて監視部の監視範囲を表す監視範囲モデルを生成し、監視範囲モデルと場所モデルと撮像条件情報とを用いて撮像部の視野に相当するレンダリング画像を生成し、撮像画像とレンダリング画像とを合成することにより監視部の監視範囲を表した合成画像を出力することを特徴とした。
(もっと読む)
複合型センサ
【課題】画像センサとその監視空間の一部を検知空間とする人体センサとを備え、両センサの検知結果を統合判定して侵入異常を検知する複合型センサにおいて、両センサの検知エリアの位置関係が正確でないと異常判定の精度が低下する。
【解決手段】監視空間内でのウォークテストを行い、画像内での人像の位置に対応した人体センサの検知信号レベルの特性150を測定する。当該特性150に基づいて、検知信号が人体検知の基準レベルZ1以上である人像位置を包含する検知位置分布範囲Roを抽出する。Z1より低い人体検知の許容レベルZ2を設定し、範囲Roの両側の距離Bの範囲に存在するZ2以上である人像位置を包含するように、範囲Roを拡張補正した補正分布範囲Reを求める。この範囲Reが中心となるように人体センサ及び画像センサの検知エリアの共通部分である複合検知エリアを設定し、画像の残りを画像センサ単独の検知エリアと定める。
(もっと読む)
撮像および画像再生するシステム、撮像および画像再生する方法、受信画像再生機器、再生機器の再生方法。
【課題】鑑賞者の再生装置の状況を判断し、その状況で楽しめる画像を送信することのできる撮像装置および撮像システムを提供する。
【解決手段】カメラ100は送信先状態判定&データベースを有しており、送信先の再生機器(大画面テレビ34a、携帯電話34b)と撮影モードや画像サイズ等の情報を記憶している。カメラ100で撮影した画像を送信したい送信先のユーザー31が、現在、鑑賞している再生機器のいずれかを検出する。検出結果に応じてカメラ100の表示パネル8には、送信先の再生機器の状態がテキスト331、332で表示される。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】設置が容易で、火災時においても、火災の位置及びその周囲の状況を正確に認識する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、複数の監視カメラに接続されたセンタ装置4とからなる。各監視カメラ2は、通常撮影用の複数の第1の撮像部21nと、赤外撮影用の1つ以上の第2の撮像部21rと、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25と、第1の撮像部において得られた複数の画像から生成された距離画像に基づいて、第2の撮像部を起動する判定部26と、を有する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、車両毎の走行状態の分析を負荷が集中することなく行い、かつ停止物体の存在を容易に認識させることができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部31と、スポットライト24と、複数の画像から距離画像のデータを生成する立体計測部33と、距離画像に基づいて、停止物体の検出を行う検出処理部P1と、停止物体にスポットライト24の光を照射させるためのライト点灯信号を出力する追加処理部Q1と、ライト点灯信号に基づいて、スポットライト24の照射位置を停止物体の位置に変更させる制御を行うライト制御部41とを有する。
(もっと読む)
駐車支援装置
【課題】軽い演算負荷で車両の進行方向や旋回方向などの車両の挙動に応じて車両周辺の立体的な物体や路面の立体的な変化を効率よく検出することができる駐車支援装置を提供する。
【解決手段】設定された駐車目標Tまで車両90を誘導する誘導経路Kに従って進行する車両90の車体端部が、路面に対して立体的な他の物体及び構造物を含む立体物と近接又は接触する可能性が高い所定の領域を、車載カメラの撮影画像又は撮影画像に基づいて生成された車両90の周辺画像上における探索領域Zとして設定し、探索領域Zに対応する車両90の周辺領域に対して立体物探索を行い、立体物を検出する。
(もっと読む)
列車内監視システム
【課題】一方を現用とし他方を予備の制御システムとする列車内監視システムを実現し、車両管理システムまたはシステム制御装置に障害が発生した場合の映像の表示、記録ができない状態を回避し、信頼性の高いシステムを提供する。
【解決手段】列車内を監視する複数台のネットワークカメラと、ネットワークカメラからの映像を記録する装置と、映像を表示する表示装置と、車両管理システムとの通信機能を持つ監視システム全体を制御するシステム制御装置と、それらを接続するネットワークで構成されたシステムにおいて、システム制御装置と車両管理システムの2重化を図ることにより、車両管理システム障害時には異なる車両管理システムとの接続を行い復旧させる機能を有する、信頼性の高い車両内監視システムを提供する。
(もっと読む)
21 - 40 / 716
[ Back to top ]