
Fターム[5C054CH01]の内容
閉回路テレビジョンシステム (47,623) | 撮像タイミング制御 (2,048) | 連続撮影 (716)
Fターム[5C054CH01]に分類される特許
41 - 60 / 716
物体検出装置
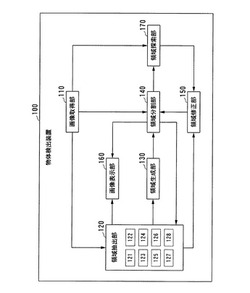
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
通報端末及び画像送信方法

【課題】非常ボタンの押下が異常の発生のタイミングとずれている場合でも、異常の発生を効率的に確認可能な画像データを送信する画像送信技術を提供する。
【解決手段】警備端末53には非常ボタン50,51と自動ドア付近の画像を撮影する監視カメラ52Aとキャッシュレジスタ付近の画像を撮影する監視カメラ52Bとが接続される。警備端末53は、監視カメラ52Aから画像データを受信し、自動ドアの開放が検知されたとき、そのn分前からそのm分後までの画像データを抽出し、監視カメラ52Bから画像データを受信し、ドロワの開放が検知されたとき、そのn分前からそのm分後までの画像データを抽出し、非常ボタン50,51のいずれかの押下を検知したとき、監視カメラ52Aから受信した画像データから最後に抽出した画像データ及び監視カメラ52Bから受信した画像データから最後に抽出した画像データを警備サーバ60に送信する。
(もっと読む)
工業用撮像システム
【課題】工業用撮像システムの実用性を向上させる。
【解決手段】部品撮像システムのカメラ100の筐体116内に撮像体112,カメラ側コンピュータ,カメラ情報表示装置142を組み込む。撮像により得られた画像データは、カメラケーブルおよびカメラ側コンピュータ,画像処理コンピュータの各通信制御部を経て画像処理コンピュータへ送られ、処理される。カメラ情報表示装置142の複数の表示ランプ140はカメラ側コンピュータと共に基板に取り付け、カメラケーブル,通信制御部を経ることなくカメラ側コンピュータのI/Oポートに接続し、複数の表示ランプ140の各点灯と消灯との組合わせ,点滅速度の設定によりカメラ異常情報およびカメラにおいて実行中の処理の種類を表示させる。カメラケーブル等の異常により画像データの処理や撮像結果の表示画面への表示が行われない状態でもカメラ情報が表示され、作業者はカメラの状態を知ることができる。
(もっと読む)
人物検査方法
【課題】身長や姿勢に関わらず、不審物をもった人物が検知器を通過した場合、その画像を撮影できる検知器を提供する。
【解決手段】ゲート110と、ゲート110を通過する人物を画像化するためのイメージキャプチャデバイス120とを有する検知器100を用いた人物検査方法であって、前記人物Pがゲート110を通過したときに、前記人物Pを画像化するステップと、前記イメージキャプチャデバイス120によって取得した画像をバッファするステップと、不審物Sを検知するステップと備え、前記不審物Sを検知するステップでは、前記不審物Sの検知前から検知後までの時間間隔の間にバッファされた画像の中から関連画像を自動記録し、検知ステップの間に、前記関連画像と前記不審物Sに対応したデータとを自動でマッチングさせ、これらをともに単一出力でオペレータに送信する。
(もっと読む)
画像監視システム
【課題】監視カメラの設置位置や監視エリアの設定を自動的に行えるようにし、これにより運用開始前の設定作業に要する時間及び労力を大幅に減らして作業性の向上を図る。
【解決手段】監視カメラ1,1,…に位置センサ、方位センサ及び傾斜センサを持たせて、当該監視カメラ1,1,…が設置された時にその設置位置、設置向き及び傾斜角等のカメラの設置状態を表す情報を管理サーバ9により取得し記憶する。そして、管理サーバ9において、監視エリア割当制御プログラム131に従い、上記記憶されたカメラの設置状態を表す情報と、予め記憶しておいた建造物等の位置と大きさを表す情報をもとに、監視カメラ1,1,…ごとに障害物を検出し、この障害物の位置と大きさを考慮して地図上に監視カメラ1,1,…ごとの監視担当エリアを設定する。
(もっと読む)
行動監視システム、行動監視プログラム、及び行動監視方法
【課題】監視対象が多数の場合であっても、監視対象の識別及び行動把握を容易に行うことができる行動監視システム、行動監視プログラム、及び行動監視方法を提供すること。
【解決手段】監視対象Tの光学像が入力される撮像部、監視対象Tと背景とを分離して監視対象Tの各特徴量を算出する特徴量算出部、特徴量から監視対象Tの各移動軌跡を算出する移動軌跡算出部、監視対象Tの所定部位の3次元位置座標を算出する位置座標算出部、所定部位の3次元位置座標に基づき、所定部位の移動速度及び移動方向を算出、所定部位の各動作軌跡を算出する動作軌跡算出部、特徴量及び3次元位置座標がステレオカメラ4間で類似する移動軌跡を繋げて、監視対象T毎の統合移動軌跡を生成する移動軌跡統合部、特徴量及び3次元位置座標がステレオカメラ4間で類似する動作軌跡に対して、監視対象T毎の統合動作軌跡を生成する動作軌跡統合部、を備えている。
(もっと読む)
カメラ切換装置、カメラ切換システム及びカメラ切換方法
【課題】複数台のカメラのうち少なくとも1台のカメラで撮影して検知した不審人物の捜索を効率良く行うことができるカメラ切換装置、カメラ切換システム及びカメラ切換方法を提供する。
【解決手段】6台のカメラ3−1〜3−6を備え、これらのカメラ3−1〜3−6のうち少なくとも1台のカメラ3−Xで撮影して得られた人物の顔に対する顔照合処理の開始時刻と終了時刻との差分時間から不審人物の移動量を推定し、推定した移動量から不審人物がいるであろうと思われる場所を撮影している少なくとも1台のカメラ3−Xに切り換える。これにより、検知後の不審人物の捜索を効率良く行うことが可能となる。
(もっと読む)
通報装置
【課題】 非常事態の発生時に取られる所定の姿勢を検出して通報する場合に、非常事態が発生する危険度に応じて通報の要否を判定することで信頼性を向上させた通報装置の提案。
【解決手段】 監視領域の画像を取得する画像取得手段と、取得した画像情報から人物の姿勢を検知する姿勢検知手段と、予め強盗発生状況要因及び所定の姿勢を記憶する記憶手段と、姿勢検知手段にて検知した姿勢が前記記憶手段に記憶された姿勢と一致した場合に、強盗発生状況要因に基づいて非常通報の要否を判定する通報要否判定手段と、非常通報要否判定手段によって通報要と判定された場合に通報を行う通報手段とを備える。
(もっと読む)
移動距離検出装置及び移動距離検出方法
【課題】移動距離の算出精度を向上させることが可能な移動距離検出装置及び移動距離検出方法を提供する。
【解決手段】移動距離検出措置1は、所定領域を撮像するカメラ10と、カメラ10の撮像画像のデータを入力する計算機30とを備えている。計算機30は、カメラ10による撮像にて得られた所定領域の画像を鳥瞰視される状態へ視点変換し、視点変換された異なる時刻の鳥瞰画像データの位置を合わせる。また、計算機30は、位置合わせされた鳥瞰画像データの差分画像データに基づいて、立体物を検出する。また、計算機30は、視点変換により立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成し、当該差分波形の時間変化から立体物の移動距離を算出する。
(もっと読む)
移動体軌跡表示装置および移動体軌跡表示プログラム
【課題】 撮影領域が可変の撮影手段から得られる撮影画像上の移動体の軌跡を当該撮影画像上に表示する。
【解決手段】 撮影手段としてのPTZカメラから得られる撮影画像上に移動体100が現れると、この移動体100を自動追尾するように、当該カメラのパン/チルト/ズーム動作が制御される。併せて、この自動追尾中のカメラから得られる撮影画像上の移動体100の重心位置に、当該移動体100の現在位置を表す現在位置マーク120が付される。さらに、撮影画像がMフレームずつ更新されるごとに、現在位置マーク120が辿ってきた過去の位置を表す軌跡マーク130が付されると共に、現在位置マーク120を先頭として各軌跡マーク130を時系列で順次結ぶように、軌跡線140が付される。つまり、自動追尾中のカメラから得られる撮影画像上に移動体100の軌跡が表示される。
(もっと読む)
監視カメラ装置、ならびに、その制御方法および制御プログラム
【課題】監視カメラ装置の監視性能を向上させる。
【解決手段】鏡筒3が、その視野が枠F1から枠F2まで移動すると、その後、鏡筒3の回転移動の速度が低減される。視野が枠F2にまで移動したとき、人物を表わす被写体OB1の顔面が含まれるからである。鏡筒3が、その視野が枠F3まで移動され、さらに、枠F3を超え枠F4に向けて移動するように、回転移動されると、鏡筒3の視野に被写体OB1の顔面が、顔認識処理において顔を認識される態様では含まれなくなる。したがって、それ以降の、つまり、顔認識処理において顔を認識されなくたった後の回転移動では、元の所定の速度で鏡筒3が回転移動する。
(もっと読む)
繁忙検知システム及び繁忙検知プログラム
【課題】固定カメラにおいて撮影された動画像を用いて、撮影範囲の領域における物体の移動や静止等の変動を数値化・検出して経営管理等に役立つ技術を提供する。
【解決手段】繁忙検知システム10は、監視カメラ30で撮影した撮影範囲45の動画像(複数フレーム)をもとに、フレームの各エリアの画素値ヒストグラムを含む学習データ51を作成する学習データ作成部12と、フレームの各エリアの画素値ヒストグラムを含む検知対象データ52を作成する検知対象データ作成部13と、学習データ51と検知対象データ52を比較してエリア毎に距離値を計算する距離計算部14と、エリア毎の距離値に基づき、撮影範囲の領域における物体の変動による繁忙の度合いを示す繁忙度を計算し、当該繁忙度をもとに繁忙箇所を検出する繁忙情報計算部15と、を有する。
(もっと読む)
狭路走行支援装置
【課題】自車両前方の障害物が自車両側方付近に移動する際の自車両と障害物との連続的な相対位置関係を、運転者に容易かつ即座に把握させることができる狭路走行支援装置を提供する。
【解決手段】自車両前方の領域を表示する第一の表示画像10を作成する第一の表示画像作成部と、自車両の左右側面17,16の領域を表示する第二の表示画像15を作成する第二の表示画像作成部と、第一の表示画像10の下方または車両進行方向後方に第二の表示画像15を並べて配置すると共に、第二の表示画像15に表示される自車両の左右側面17,16の車幅方向端部から自車両の進行方向前方に延びる左右自車幅相当延長線14,13を第一の表示画像10と第二の表示画像15とに連続して表示する画像合成部と、を備えた。
(もっと読む)
ドライブレコーダ
【課題】LED信号機の点灯色を確実に識別できる映像とこれに同期した音声とを記録するとともに、汎用映像音声信号として出力できるドライブレコーダを提供する。
【解決手段】カメラ11のフレームレートをLED信号機の電源周波数の影響を受けない第1周波数に設定して撮像するとともに、この画像データと音声データとを符号化したのち時間的に同期して多重化することで第1周波数のフレームレートのまま記録する。そして取得した画像データと音声データとを復号化して再生する際に、フレーム単位の画像データを追加又は削除することで汎用映像信号に対応した画像データに変換する。
(もっと読む)
不審者検知装置
【課題】押込強盗等の不審者を高い精度で検知できる不審者検知装置を提供する。
【解決手段】所定領域内の画像を順次取得する撮像部と、画像から検出した人物像ごとに画像上にて追跡し各人物像の位置情報を順次出力する追跡部と、不審者の存在を検知する検知部と、不審者の存在を検知すると警報出力する出力部とを有する不審者検知装置において、検知部は、追跡部にて複数の人物像を検出しているならば、当該複数の人物像のうち第一の人物像と他の第二の人物像との相対的な位置関係である相対位置を算出する相対位置算出手段と、相対位置が所定時間にわたって略一定であるとき不審者が存在しているとする判定手段とを有することを特徴とした。
(もっと読む)
撮像システムおよび撮像装置
【課題】入力画像などから得られる各種情報を複数の撮像装置間で送受信することにより、多様な撮像制御を行うことができる撮像システムおよび撮像装置を提供する。
【解決手段】撮像システムは撮像装置Aと撮像装置Bとから構成される。撮像装置Aが追被写体Aを追尾し、撮像装置Bは被写体Bを追尾する。撮像装置A、Bは、画像解析部114、動作制御部115、メタデータ生成部116、接近判定部117、動き予測部118、構図決定部119、撮像トリガ生成部120を備える。被写体Aと被写体Bとが接近した場合に撮像装置Bからメタデータを撮像装置Aに送信し、メタデータに基づいて撮像装置Aは構図を決定する。そして、被写体Aと被写体Bが近づいて被写体Bが撮像装置Aの撮像範囲に入ったら決定した構図で撮像を行う。
(もっと読む)
車両周辺監視装置
【課題】カメラの時系列画像間での特徴点の追跡を行うことなく、計算量を低減させてカメラ運動を精度良く推定する車両周辺監視装置を提供する。
【解決手段】異なる時点で撮像された第1撮像画像Im1及び第2撮像画像Im2について、第1特徴点P1〜P3を抽出すると共に第2特徴点Q1〜Q3を抽出する特徴点抽出処理と、第2撮像画像Im2の撮像時における仮カメラ運動Mkを設定して、各第1特徴点に対応する第2撮像画像Im2での第2エピポーラ線EL11〜EL13を求め、第2エピポーラ線までの距離が最小となる第2特徴点を抽出して、該最小の距離を各第1特徴点の距離誤差dとし、各第1特徴点の距離誤差の総和が最小となる仮カメラ運動Mkを求める仮カメラ運動最適化処理と、距離誤差dの総和が最小となる仮カメラ運動Mkを、カメラ運動として推定するカメラ運動推定処理とを実行する。
(もっと読む)
車載画像監視装置
【課題】搭乗者のプライバシーを保護しつつ、遠隔からの画像確認を円滑に行える車載画像監視装置を提供する。
【解決手段】車両に搭載され、搭載車両の状況を撮影した画像を外部装置が通信回線を介して取得可能とする車載画像監視装置であって、前記車両の状況を撮影した画像を取得する画像取得部と、前記車両の使用状態を監視する状態監視部と、前記外部装置からの取得要求に対して前記画像を当該外部装置へ送信する制御部と、を有し、前記制御部は、前記外部装置から取得要求を受信したとき、前記使用状態に応じて前記画像の送信可否を判定する。
(もっと読む)
交通流計測装置
【課題】交通流の監視業務に用いられるカメラ設置条件での映像を用いて、効率よく交通流を計測する交通流計測装置を得る。
【解決手段】所定の周期で道路状態を撮像する画像撮像部10により撮像された画像内の車線毎に車両検出領域を形成し、車頭車尾検出部12は、この車両検出領域の最新画像と画像撮像部10により1周期前に撮像された画像を順次ずらしながら対向させ、両画像の各画素の輝度の差分を累積するシフトマッチング手法により、車両の車頭および車尾を検出し、交通流計測部20によって、車頭車尾検出部12による車頭及び車尾の検出結果を用いて、車線ごとの車両通過台数を計測するようにした。
(もっと読む)
画像処理装置および画像処理システム
【課題】低コストで高品位に複数の映像信号を合成する画像処理装置および画像処理システムを提供する。
【解決手段】画像処理システムは、4つのカメラ1a〜1dと、画像処理装置30と、液晶ディスプレイ10とを備えている。画像処理装置30は、選択部2と、ADコンバータ3と、NTSCデコーダ4と、RAM5と、視点射影変換部6と、合成部7と、制御部8と、LCDコントローラ9とを有する。非同期カメラ1a〜1dと、1つずつのADC3、NTSCデコーダ4およびRAM5により、低コストで画像処理システムを構成できる。また、制御部2を設け、同期パルスが検出された順に映像信号を自動的に選択するため、効率よく短時間で映像信号11a〜11dを選択でき、高品位な俯瞰画像を生成できる。
(もっと読む)
41 - 60 / 716
[ Back to top ]