
Fターム[5C054FC13]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 動き抽出 (836)
Fターム[5C054FC13]に分類される特許
201 - 220 / 836
監視システム
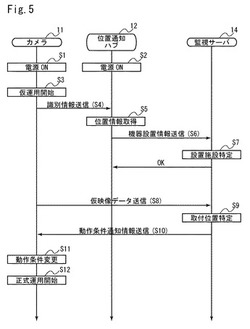
【課題】カメラの動作条件を自動的に設定することができる監視システムを提供することを課題とする。
【解決手段】カメラ11は、仮運用を開始する。位置通知ハブ12は、カメラ11の識別情報とGPS装置14が測定した測位情報とを含む機器設置情報61を出力する。監視サーバ4は、測位情報と予め設定された支店の位置情報とに基づいて、カメラ11の設置支店を特定する。監視サーバ4は、仮運用時に撮影された仮映像データの輝度及び動きの変化を検出する。これらの変化パターンと、取付位置とを対応付けた映像パターン情報421とに基づいて、カメラ11の取付位置が特定される。監視サーバ4は、特定された設置支店及び取付位置とカメラ設定情報422とに基づいて、カメラ11の動作条件を決定する。カメラ設定情報422は、カメラ11が設置され得る支店及びその支店における取付位置と、動作条件とを対応付けた情報である。
(もっと読む)
不審行動検知方法および不審行動検知装置

【課題】多様で複雑な行動パターンの監視対象においても客観的な基準でより信頼性の高い不審行動の検知を行うことのできる不審行動検知方法および不審行動検知装置を提供する。
【解決手段】カメラ11から入力される画像内の人物を追尾する追尾部21と、追尾中に、その追尾中の人物の動作が予め定めた基本動作らしさの度合いを示す信頼度を、複数種類の前記基本動作のそれぞれについて繰り返し導出する信頼度導出部25aと、導出された基本動作毎の信頼度を時系列にした基本動作信頼度時系列データを記憶する記憶部22と、記憶されている基本動作信頼度時系列データに基づいて、追尾している人の行動が不審行動であるか否かを判定する不審判定部25cとを有する。
(もっと読む)
テレビジョン
【課題】 実際に人がいる場合のように現状に応じて適切な防犯対応をすることができなかった。
【解決手段】 視聴予約時間になった場合、ステップ5にて人感センサ6の検出結果に基づいて人がいない場合はステップ6にて防犯用設定を反映させる。ユーザは防犯用設定として、「音量大」、「低音大」、「画面暗く」を選択しているのであれば、ステップ6にて、防犯用設定反映回路5がこの防犯用設定を映像音声出力装置3に指示すると、同映像音声出力装置3は、音声については音量を大きく、かつ、低音を大きくし、映像については画面を暗くして表示する。その後、ステップ7では視聴予約終了時刻になっていないか判断し、同終了時刻になるとステップ8にて電源をオフにする。
(もっと読む)
検出装置
【課題】監視対象を監視する領域を容易に決定する。
【解決手段】検出装置100は、可視光画像及び不可視光画像を撮像する撮像部101と、少なくとも可視光画像に基づいて、物体の検出しやすさを表す容易度を算出する算出部111と、容易度が閾値より大きいか否かを判定する判定部112と、容易度が閾値より大きい場合に、可視光画像から物体モデルに適合する物体を検出し、物体の周囲の領域を監視領域として決定する決定部114と、前記監視領域を用いて不可視光画像から移動体を検出する移動体検出部113と、を備える。
(もっと読む)
物体検出装置及び物体検出プログラム
【課題】照明環境及び姿勢変動等に起因するアピアランス変動、並びに複雑な背景下等での環境変動に対してロバストな物体検出を行う。
【解決手段】映像中の変化領域及び非変化領域を用いて学習部6が生成した変化対象検出器7を前段として用い、アピアランス変動及び環境変動にロバストな検出対象の候補領域抽出を実現し、後段として、事前学習した物体検出器10を組み合わせ、最終的に、対象尤度算出部9が変化対象検出器7を用いて算出した対象尤度と、対象尤度算出部11が物体検出器10を用いて算出した対象尤度を組み合わせた結合尤度を用いて結合尤度判定部13が閾値判定して物体検出を行う。
(もっと読む)
画像監視装置
【課題】監視カメラ等における従来の動体検知において、動体検知を行う検知範囲については、撮影前にあらかじめ特定の検知範囲に固定して設定しておくのが一般的である。そのため、撮影時の時間経過、または撮影方向などのカメラの状態が変化した場合、その都度ユーザが手動で検知範囲を設定し直していた。これにより、設定の手間がかかる、設定作業中に検知漏れが発生する等の問題があった。
【解決手段】動体検知を行う画像監視装置において、画像の撮影時刻またはカメラの状態との少なくとも一方に対応する検知範囲を、動体検知の開始前にあらかじめ設定し保存しておく。そして、動体検知の実行中の時間経過やカメラ状態の変化に応じて、現在の時刻やカメラ状態に対応した検知範囲をあらかじめ保存しておいたデータから読み込み、その検知範囲に基づいて動体検知を実行する。
(もっと読む)
ビデオ監視を改善するための方法およびシステム
本発明は、ビデオ監視を改善するための方法およびシステムを提供する。システムは、ビデオ監視プラットフォームViSSと、ビデオ監視プラットフォームに接続された第1のサーバSVASとを備える。ビデオ監視プラットフォームは、第2のサーバCSMおよびゲートウェイCSGも備える。ユーザ側カメラが、ユーザの頭部動作をキャプチャし、ユーザ側DVSが、キャプチャされたビデオを、ViSSを介して、SVASに送信する。SVASは、ビデオを処理し、頭部動作を解析し、解析の結果をCMSに送信する。その後、CMSは、解析の結果に従って、対応する命令をCSGに送信する。次に、CSGは、受信した命令をPTZ制御命令に変換し、このPTZ制御命令をオンサイトDVSに送信する。最後に、オンサイトDVSは、PTZ制御命令に従って、対応する動作を実行するように、オンサイトカメラに指示する。  (もっと読む)
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内を移動する歩行者を撮像する全体視撮像部と、予め定められた条件に基づいて、前記全体視撮像部の撮像データから追跡対象とすべき前記歩行者を特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像データに基づいて、前記追跡対象が事故に遭う危険性の高い危険状態であるか否かを判定する危険状態判定部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
移動体撮像装置
【課題】 移動体を撮像面に捉える制御を行う際、撮像装置の撮影可能なフィールドの広範囲にわたり漏れなく、かつ精度良く移動体を撮像面に捉え、制御にかかる処理負担を抑える。
【解決手段】 時間軸に順次撮影された撮影画面61a〜61hは、時間軸に沿って順次に撮影された画面で、画面61aの侵入者は、後続する画面61b,61cでは移動し、3フレームでとった画面62a,62bの差分画像から侵入者の移動方向、侵入者の予測位置座標を求める。この位置座標をもとに侵入者を画面の中心で捉えるためのパン・チルト値が算出され、又画面62bの差分画像を囲む矩形(ズーム対象矩形)の長さに基づいてズーム値が算出され、PTZ操作により画面61e(ズームアップ)にする。画面61e,61fで侵入者の移動方向の変化が所定量を超えている場合、フレームアウトを防ぐためにズームダウン操作を行い、画面61hにする。
(もっと読む)
移動物体検出装置および画素の類否判定方法
【課題】演算処理負担を軽減しつつ、移動物体の検出を正確に行う。
【解決手段】時系列で連続的に与えられるフレーム単位の入力画像と予め用意された背景画像とを、個々の画素単位で比較する。入力画像の着目画素の画素値(r,g,b)と背景画像の対応する画素の画素値(R,G,B)とを三次元色空間上にプロットし、点q(r,g,b)と点Q(R,G,B)を定義する。原点Oと点Qとの距離をDとし、長軸半径α=h・D(但し、h<1)、短軸半径β=k・D(但し、k<h)をもつ楕円を、点Qを中心として、2点O,Qを通る基準軸Zが長軸方向となるように配置し、基準軸Zを中心に回転させて回転楕円体Eを定義する。点qが回転楕円体Eの内部にあれば着目画素は背景領域の画素とし、外部にあれば着目画素は移動物体の画素とする。移動物体の画素の集合体を、当該入力画像上における移動物体の占有領域として検出する。
(もっと読む)
群衆監視装置および方法ならびにプログラム
【課題】精度良く異常領域を検出する。
【解決手段】監視領域WR内からベクトル発生領域BGRの検出が行われ、検出されたベクトル発生領域BGRにおいて基準領域Rrefの設定および複数の注目領域ARの生成が行われる。このとき、監視領域WRの中から人物の密集度が設定しきい値未満である領域が基準領域Rrefとして設定される。その後、基準領域Rrefを用いて異常のある注目領域ARが検出される。その後、検出した異常領域EARについての情報が画面上に出力され、もしくはカメラ制御手段50により監視カメラ2が異常領域をズーミングして撮影する等が行われる。
(もっと読む)
車両周辺監視装置
【課題】俯瞰映像上の障害物を強調して表示し、前記俯瞰映像上で歪んで表示される障害物の把握を容易にした車両周辺監視装置を提供すること。
【解決手段】一定の時間間隔ごとに俯瞰映像を取り込み、特徴点抽出処理部3において特徴点Pを抽出する。そして、前記抽出した特徴点Pの動きを特徴点追跡処理部4において追跡処理する。この特徴点Pの追跡処理では、特徴点Pのオプティカルフローを計算することでその動きベクトルを求める。次に、三次元計測処理部5において俯瞰映像上の特徴点Pの位置の変化から自車両と特徴点Pとの相対運動情報と、前記特徴点Pの三次元座標情報を算出する。さらに、前記算出した前記相対運動情報と前記三次元座標情報とから障害物検知処理部6において障害物を検知し、前記検知した障害物を含む前記俯瞰映像上の領域を強調領域描画処理部8において決定し強調し、表示部10により表示出力する。
(もっと読む)
エレベータ監視装置、エレベータ監視方法及びエレベータ遠隔監視システム
【課題】複数のエレベータのかごのカメラの監視対象画像から画像処理によりかご室内の滞留や汚れ及びレンズ汚れなどの異常を検知でき、エレベータ毎の基準画像をサーバ装置に手動登録する手間を不要にさせるエレベータ監視装置を提供する。
【解決手段】エレベータのかごに設けられたカメラが所定時間間隔で撮影した連続する画像列からなる監視対象画像を記憶する第1記憶手段27と、この第1記憶手段27が記憶する監視対象画像の画像列から、かご室照明の消灯期間の開始時点を検出する検出手段28と、この検出手段28が検出した開始時点から所定時間前の画像を第1記憶手段27の監視対象画像から抽出する抽出手段30とを備える。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
異常検知装置
【課題】監視空間に元々存在していた椅子等が動かされてもこれを不審物の持ち込み等の異常と誤検知しないこと。
【解決手段】変化領域抽出手段41は撮像部2から入力される入力画像を背景画像30と比較して変化領域を抽出し、追跡手段42は変化領域の追跡を行って変化領域ごとの軌跡31を検出し、領域分類手段43は軌跡31を分析して変化領域を移動領域と静止領域に分類し、派生判定手段44は移動領域と静止領域の間の離間度を算出して派生判定値未満の前記離間度が算出された移動領域と静止領域の間に派生関係を設定し、異常判定手段45は同一の移動領域に対して派生関係が設定された静止領域のペアを検出し、ペアを除いて異常候補領域を設定し、異常候補領域の軌跡31が所定時点を超えて検出されている場合に異常信号を出力する。
(もっと読む)
暴れ検出装置および暴れ検出方法
【課題】エレベータのかご内の人の暴れを誤検出させずに検出でき、高い精度で人の暴れを検出可能な暴れ検出装置を提供する。
【解決手段】撮像装置が撮影したかご内の映像を受信する受信部と、受信した映像を日付別および時刻別に記憶する記憶部と、記憶映像26および受信映像27をそれぞれ複数の小領域に分割する分割部と、分割された複数の小領域を有する記憶映像26中、連続する画像間で動きの変化が生じた小領域に対して重み付けを行い、複数の小領域を有する受信映像27中、連続する画像間で動きの変化が生じた小領域に対して重み付けを行い、各映像を数値化した数値化データを生成する解析部と、解析部が生成した2つの数値化データの差分量を算出し、差分量と予め記憶する閾値とに基づき、受信部からのかご内の映像の中から、この閾値よりも大きい差分量を有する小領域を人が暴れたエリアと検知する検知部とを備える。
(もっと読む)
移動物体追跡装置
【課題】本発明は、監視画像より移動物体を追跡中に照明変動等の環境変動が発生して入力画像が不安定になっても継続して移動物体を追跡可能とすることを目的とする。
【解決手段】
環境変動検出手段により監視領域内の照明変動を検出し入力画像が不安定となると、移動物体の抽出処理を背景差分処理からテンプレートマッチング処理に切り替え、継続して移動物体の追跡処理を行う。また、照明変動を検出すると入力画像を照明変動前の背景画像との輝度差に応じて補償を行い、テンプレートマッチングを精度良く行う。
(もっと読む)
画像解析装置、画像解析方法およびプログラム
【課題】オブジェクトの検出処理と特定オブジェクトの追跡処理とを効率的にすることができる画像解析装置を提供すること。
【解決手段】画像解析装置は、被写体の向きに対応づけて複数の基準特徴量を記憶する特徴量記憶部と、動画に含まれる複数の動画構成画像のそれぞれから、複数の特徴量を抽出する特徴量抽出部と、被写体の向きに対応づけて記憶された複数の基準特徴量に対する抽出された複数の特徴量の適合度に基づいて、動画構成画像から特定被写体のオブジェクトを抽出するオブジェクト抽出部と、特定被写体の向きを特定する向き特定部と、特徴量記憶部が記憶している基準特徴量より、抽出されたオブジェクトの特徴量に適応させた基準特徴量を算出する基準特徴量算出部と、特徴量記憶部が特定された向きに対応づけて記憶している基準特徴量を、基準特徴量算出部が算出した基準特徴量で更新する特徴量更新部とを備える。
(もっと読む)
魚眼監視システム
【課題】歪曲円形画像からの切出場所を切り替えても、切り替え前後の画像の空間的な位置関係を把握できるようにする。
【解決手段】魚眼レンズを用いた撮影により得られた歪曲円形画像Sの一部分を切り出して、平面正則画像に変換してモニタに表示する。通常の監視状態では、点P0の近傍領域E0内の画像を切り出してモニタに表示しながら、画像をフレームごとに解析して動体検出を行う。動体60が検出されたときは、動体の中心点Pnの近傍領域En内の画像を切り出してモニタに表示する。表示の切替時には所定の移行期間を設け、点P0から点Pnへ向かう所定の移動経路に沿って切出位置を徐々に移動させるパンニングと、画像の倍率を徐々に変えるズーミングとを行う。パンニング速度は、魚眼レンズの光学的特性を示す仮想球面上での移動速度が所望の速度になるように設定する。その後、動体60を追跡しながら画面を移動する。
(もっと読む)
動線編集方法及び装置並びに動線編集プログラム
【課題】複数の動線認識装置でそれぞれ認識される動線のなかから同一移動体に対する動線を精度よく連結できる動線編集装置を提供する。
【解決手段】動線編集装置10は、第1の動線データベース15から第1の監視領域と第2の監視領域とが重なり合った重複領域を終点とする動線データを連結元動線データとして抽出し、第2の動線データベース25から重複領域を始点とする動線データを連結先動線データとして抽出する。連結元動線データの重複領域内の軌跡と連結先動線データの重複領域内の軌跡とを比較し、重複領域内の軌跡が近似する連結元動線データと連結先動線データとを連結して、連結元動線データの始点から連結先動線データの終点までの連結動線データを生成する。
(もっと読む)
201 - 220 / 836
[ Back to top ]