
Fターム[5F031JA04]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 光センサ (2,240) | エリアセンサ、カメラ (579)
Fターム[5F031JA04]に分類される特許
141 - 160 / 579
形状認識装置
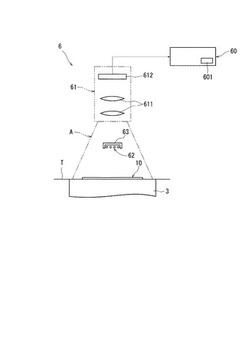
【課題】透明体からなる板状物であっても輪郭を明確に特定する形状認識装置を提供する。
【解決手段】板状物10の輪郭を検出する形状認識装置6であって、板状物10を保持する保持テーブル3と、保持テーブル3上に保持され板状物10を撮像する撮像手段61と、撮像手段61下側に配設された照明手段62と、照明手段62によって照射され保持テーブル3上に保持された板状物10で反射した反射光のうち撮像手段61による撮像領域の正反射光を遮蔽する遮蔽手段63とを具備している。
(もっと読む)
吸着装置および液滴吐出装置

【課題】ワークにそりや局部的な変形を発生させない吸着装置を提供する。
【解決手段】ワーク5を吸着する吸着装置20であって、吸着板21と、吸着板21に設けられワーク5の外形に沿って額縁状に形成された多孔質の多孔質吸着部22と、多孔質吸着部22に連通された負圧発生部25と、を備えている。このため、ワーク5を吸着する部分がワーク5の外形付近であり、吸着する面積が広いためワーク5にそりや局部的な変形を与えることなく吸着ができる。そして、ワーク5に不要な応力をかかることがなく、ワーク5の割れを防止できる。
(もっと読む)
重ね合わせ装置、基板ホルダ、位置検出方法およびデバイスの製造方法
【課題】高精度な位置合わせ装置は調整範囲が狭いので、その調整範囲に収まるように予備的に位置合わせをすることが望ましいが、予備的な位置合わせをしてから高精度な位置合わせ装置に搬入されるまでに、位置ずれが生じてしまう可能性があった。
【解決手段】ウェハと、ウェハを保持した状態で搬送されるウェハホルダと、ウェハを、ウェハホルダに対し載置方向に配置した状態で、載置面の側から照明する照明部と、照明部により照明されたウェハの外周部を、載置面とは反対の面の側から撮像することによりウェハの位置を同定する位置同定部と、ウェハホルダを搬送する搬送部と、ウェハを保持したウェハホルダを2組用い、互いのウェハを位置合わせして重ね合わせる重ね合わせステージとを備える重ね合わせ装置。
(もっと読む)
露光装置ユニット及びその基板交換方法
【課題】プリアライメント装置での基板の交換を効率的に行うことができる露光装置ユニット及びその基板交換方法を提供する。
【解決手段】搬送用ロボット15が、プリアライメント装置12でプリアライメントされた基板W1を第1のハンド31で受け取る動作と、第2のハンド32に支持されたプリアライメントされる基板W2をプリアライメント装置12に受け渡す動作と、を同時に行う。
(もっと読む)
基板吸着方法および基板吸着装置
【課題】有効領域の面付けが異なる基板であっても、有効領域におけるゆがみの発生を抑制することができる基板吸着方法および基板吸着装置を提供する。
【解決手段】ステージ101に複数設けられた吸着穴110,120から、有効領域501を有する基板を吸引し、ステージ101に基板を吸着する方法であって、少なくとも一つの吸着穴110,120を含む吸着穴の群151〜155、161〜165毎に、吸着穴110,120からの吸引動作を互いに独立して制御することにより、有効領域501を避けて基板を吸引し、ステージ101に基板を吸着する工程を備える。
(もっと読む)
パターン形成装置
【課題】 基板に対するパターン形成を迅速且つ正確に行うことができるパターン形成装置を提供する。
【解決手段】 基板wに対してパターン形成を行うパターン形成装置1であって、支持板2と、支持板2を回動する駆動手段8と、支持板2の回動により検出位置Dに搬送された基板wの位置を検出する基板位置検出手段20と、支持板2の回動により加工位置Pに搬送された基板wに対してパターン形成を行う加工手段30とを備え、支持板2の各装着部4,4は、基板位置検出手段20の検出に基づいて基板wの位置を修正する位置修正手段5を備えており、駆動手段8は、支持板2を正逆両方向に180°回動して各装着部4,4が検出位置Dと加工位置Pとの間で移動するように制御される。
(もっと読む)
接着フィルム保持機構
【課題】保持面に形成した吸着溝に保持面の外周から負圧を伝達して接着フィルムを保持する場合においても、接着フィルムに支持されるチップ同士の間隔に影響を与えることなく接着フィルムを保持すること。
【解決手段】環状フレームの開口部にテープ103を介して支持されて互いに所定の間隔をもった複数のチップ104が貼着された接着フィルム105をテープ103を介して保持する保持面34と、この保持面34に形成された吸着溝341と、保持面34の外周側に形成された吸着溝341に連通する吸引口332とを有する接着フィルム保持機構において、吸引口332は、保持面34の外周の片側に偏在して形成されていることを特徴とする。
(もっと読む)
露光装置及び露光方法
【課題】アライメント動作に要する時間を短縮して、スループットを向上することができる露光装置及び露光方法を提供する。
【解決手段】制御部70Aには、両アライメントマークMa,Waのずれ量がマスク位置調整機構16の駆動によって露光転写時の所望のアライメント精度範囲以内となる、アライメント動作実施許容範囲が設定されており、両アライメントマークMa,Waのずれ量がアライメント動作実施許容範囲以内であるとき、マスク位置調整機構16によるアライメント動作を実行して該アライメント動作を完了する。
(もっと読む)
ワーク保持機構
【課題】保持面に形成した吸着溝により伝達される負圧によってワークを保持する場合においても、ワークが適切に保持されていない状態となるのを事前に検出すること。
【解決手段】環状フレーム101の開口部102にテープ103を介してワークWを支持した形態のワークユニット10のワークWをテープ103を介して保持する保持面34とこの保持面34に形成された吸着溝341とを有するワーク保持部3を有するワーク保持機構において、環状フレーム101の内周とワークWの外周との間に位置するテープ103に対応する位置に吸着溝341を囲むように形成された環状のリーク検出溝331と、リーク検出溝331に負圧を発生させる吸引部323と、リーク検出溝331と吸引部323との間に配設された圧力センサ324とを有し、リーク検出溝331の断面積を吸着溝341の断面積よりも大きくしたことを特徴とする。
(もっと読む)
近接露光装置及び近接露光方法
【課題】比較的簡単な計算で、マスクとワークのギャップを平均化することができ、露光精度を向上することができる近接露光装置及び近接露光方法を提供する。
【解決手段】ギャップセンサ17によってマスクM及びワークWとの間のギャップを4箇所の測定点A、B、C、Dで測定し、4箇所の測定点A、B、C、Dによって画成される四角形ABCDの各辺の中点K,L,M,Nの4箇所の座標のうち、3箇所の中点K、L、Mの座標における各ギャップが一様になるようにZ−チルト調整機構43を駆動する。
(もっと読む)
露光装置
【課題】マスク保持部のフレームの熱変形を抑制して、露光精度を向上することができる露光装置を提供する。
【解決手段】マスクステージベース11は、複数の中空フレーム91〜94によって構成されており、中空フレーム91〜94の内部には、サーマルチャンバ80内に供給されるエアと共に温調されたエアが供給される。
(もっと読む)
真空処理装置及び基板搬送機構の調整方法
【課題】基板を支持して搬送される基板支持機構を備える真空処理装置において、異常を有する基板支持機構を検出することができる真空処理装置を提供する。
【解決手段】直列に連結された真空処理室内で連続的に基板63を搬送する基板搬送機構は、基板63を保持した状態で移送される基板支持機構50を撮影するCCDカメラ103を有しており、CCDカメラ103によって撮影された映像から基板支持機構50が基板63を支持する位置を測定し、基板支持位置が異常な基板支持機構50を検出する。
(もっと読む)
ホルダメンテナンス装置
【課題】基板の直径が大きくなる傾向にある近年において、回路が形成された2枚の基板を、接合すべき電極同士が接触するように高い精度で位置合わせするために、その2枚の基板をそれぞれ保持する2枚の基板ホルダを精密に管理する機構が求められている。
【解決手段】基板ホルダを収容するホルダラックと、ホルダラックから取り出される基板ホルダを清掃する清掃装置とを備え、ホルダラックは、清掃装置を含む処理部に着脱できるホルダメンテナンス装置。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】横並びに複数配置された載置台上の搬送容器から基板搬送機構により基板を取り出して処理を行うにあたり、載置台上の搬送容器内の基板の高さ位置を正確に求めること。
【解決手段】載置台11を複数配置すると共に、少なくとも2つの載置台11の並びに沿って前記大気搬送室22内を移動自在な撮像ユニット41を設けて、載置台11上のFOUP1内においてウエハWが収納される収納領域2全体を撮像ユニット41により一括して撮像し、この撮像結果に基づいて前記FOUP1内のウエハWの高さ位置を検出する。
(もっと読む)
基板収納状態検出装置及び基板収納状態検出方法
【課題】基板収納容器の各スロットに収納されている基板の収納状態を定量的に表す指標として少なくとも基板の飛び出し量及び基板の垂れ量を簡易な構成で速やかに検出する。
【解決手段】基板11の配列方向及び基板11の搬出方向に交差する方向から見た各スロットに収納されている基板11の開口部19側の端部の画像を撮像する撮像手段3と、撮像手段3により撮像された画像に基づいて、各スロットに収納されている基板11の収納状態を定量的に表す指標として、所定の収納位置から開口部19の前方へと飛び出している基板11の飛び出し量と開口部19側の端部が垂れている基板11の垂れ量とを検出するとともに、検出された基板11の飛び出し量及び垂れ量を出力する基板収納状態検出手段61と、を備える基板収納状態検出装置。
(もっと読む)
プリアライナ装置およびそれを備えた搬送システム
【課題】主に、小径ウエハを確実にアライメントすることができること、ウエハを搬送してくるロボットハンドの形状に影響されることなくウエハの受け渡しが可能であることを課題とする。
【解決手段】リフト機構17のリフトピン18の上下動の動作が、ウエハ20の載置部11がX軸移動機構15とY軸移動機構14とによって動作する平面方向との移動動作とは無関係におこなわれるよう構成する。
(もっと読む)
露光装置及び露光方法
【課題】本発明は、基板の撓みを自動的に矯正して矯正具合の再現性を改善し、基板の解像度の面内部分布を均一にする露光装置及び露光方法を提供する。
【解決手段】本発明の一実施の形態に係る露光装置は、フォトマスクを固定するマスクホルダと、基板の外周部を固定するチャック及び前記基板に対する圧力を調整する1つ以上の圧力調整部を有するワークステージと、前記フォトマスクのパターン及び前記基板の画像を取得する画像取得部と、前記画像取得部からの情報に基づき、前記圧力調整部の前記基板に対する圧力を調整する制御部と、を備える。
(もっと読む)
アライメント装置
【課題】アライメント装置の小型化を図ることが可能な技術を提供する。
【解決手段】アライメント装置は、被接合物91を保持するステージ12と、ステージ12を摺動可能に支持する支持部材と、ステージ12の側方から押圧力を加えることによって、ステージ12を略水平平面に平行な方向に移動する位置調整機構50とを備える。位置調整機構50は、押圧点PT11においてステージ12をX方向に押圧する押圧力付与部51と、押圧点PT12においてステージ12をY方向に押圧する押圧力付与部52と、押圧点PT13においてステージ12をY方向に押圧する押圧力付与部53とを有する。
(もっと読む)
位置補正装置及びそれを備えたハンドラ
【課題】半導体装置又は電子部品等のデバイスの姿勢矯正を、機械的接触なしに行なうことで、デバイスの品種ごとに部品交換を不要とするとともに、デバイスへの接触ダメージや矯正主体の磨耗によるトラブルを防止しつつ、位置決め精度を高めた位置補正装置及びそれを備えたハンドラを提供する。
【解決手段】吸着保持機構Vの先端部分に回転可能に取り付けられ、デバイスを直接的に保持する吸着ノズルNを備えたフランジ31と、吸着保持機構Vの直下に設けられた筒状の補正ブロック8と、この補正ブロック8にモータの動力を伝達し回転制御するベルト81及び第1のプーリー82と、フランジ31の筒状の開口部84を通してデバイスを下方より撮像する撮像機構9とからなる。
(もっと読む)
半導体チップの供給装置及び供給方法
【課題】この発明は通常使用されるサイズよりも大きなサイズの半導体ウエハを使用することができる半導体チップの供給装置を提供することにある。
【解決手段】分割された1つの分割ウエハを保持したウエハリング8が供給されて水平方向に駆動位置決めされる供給テーブル4と、供給テーブルを水平方向に駆動しながら供給テーブルに供給保持された分割ウエハを上方から撮像する撮像カメラ41と、撮像カメラによって撮像された分割ウエハの撮像信号を処理する画像二値化処理部43と、画像二値化処理部で処理された撮像信号に基づいて供給テーブルに供給保持された分割ウエハが半導体ウエハのどの位置の部分のものであるかを判定する判定部57と、判定部の判定に基づいて供給テーブルの水平方向の駆動を制御し供給テーブルに保持された分割ウエハの複数の半導体チップを順次ピックアップ位置に位置決めする駆動制御部46を具備する。
(もっと読む)
141 - 160 / 579
[ Back to top ]