
Fターム[5H004GB01]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | プラント、プロセス制御 (380)
Fターム[5H004GB01]の下位に属するFターム
Fターム[5H004GB01]に分類される特許
41 - 60 / 234
編集方法および編集装置

【課題】従来のブロック線図の編集機能は十分とは言えない。
【解決手段】ブロック線図の編集方法は、ブロック線図を生成するステップと、ブロック線図のブロックに対する除外指定を受け付けるステップと、除外指定されたブロックの出力をブロック線図の新たな入力として扱うステップと、除外指定されたブロックの入力をブロック線図の新たな出力として扱うステップと、を含む。当該編集方法はさらに、除外指定されたブロックの出力をブロック線図の新たな入力とみなし、除外指定されたブロックの入力をブロック線図の新たな出力とみなした上で、ブロック線図を状態方程式に変換するステップを含む。
(もっと読む)
プラント運転支援装置及びプラント運転支援方法

【課題】オペレータの操作負担を軽減できる運転支援装置及び運転支援方法を提供する。
【解決手段】 入力インターフェース71は、予測シミュレーションの目的を指定し、判定手段72は、仮想操作変数に基づく定常状態予測シミュレータ5による予測結果が、前記目的を満たすか否かを判定する。判定の結果、前記予測結果が前記目的を満たさない場合に、入力手段73は、前記仮想操作変数を更新して前記定常状態予測シミュレータ5に入力する。
(もっと読む)
プラントシミュレータおよびプラントシミュレーション方法
【課題】モデルパラメータ調整直後におけるシミュレーションのバランスを維持できるプラントシミュレータ等を提供する。
【解決手段】パラメータ調整手段は、モデルで使用されるモデルパラメータを、シミュレーションにより得られる第1のデータの値と、プラントにおける前記第1のデータの値とが一致するように調整する。偏差算出手段は、前記パラメータ調整手段による調整後、前記パラメータ調整手段による調整の対象とはならない第2のデータについて、前記シミュレーションにより得られる値と、前記プラントにおける値との間の偏差を算出する。トラッキング手段は、前記偏差算出手段により算出された前記偏差または当該偏差に応じた偏差を維持するように前記第2のデータをトラッキングする。
(もっと読む)
プラントシミュレータ
【課題】現在使用している統計モデルが適切なモデルとして機能しているか否かをデータに基づいて評価し、必要な処置を講ずることを可能とするプラントシミュレータを実現する。
【解決手段】プラントデータを収集し、プラントの状態を物理モデルにより演算して第1推定値データを出力する物理モデル演算部と、前記第1推定値データを説明変数として入力すると共に、前記プラントの性状分析データを目標変数として入力し、統計モデルにより演算して第2推定値データを出力する統計モデル演算部とを具備するプラントシミュレータにおいて、
前記統計モデルに入力している前記第1推定値データに基づき、現在使用されている前記統計モデルの適正性を評価する統計モデル評価部を備える。
(もっと読む)
プラント状態量の予測方法およびこれを用いたプラント動特性シミュレータ、プラント状態監視装置ならびにプラント予測制御装置
【課題】放射基底関数ネットワークを使用したプラント状態量の予測方法および装置を提供する。
【解決手段】本実施例は、放射基底関数ネットワーク13を用いる予測演算部1を有する。予測演算部1の入力値は、(1) 被予測状態量の動特性に影響を及ぼす状態量または操作量の現時刻より所定のサンプル前までの過去時刻サンプル値、(2) 現時刻サンプル値、(3) 被予測状態量の現時刻より所定のサンプル前までの過去時刻サンプル値とする。予測演算部1の出力値は、(4) 被予測状態量の現時刻サンプル値とする。放射基底関数ネットワーク13は、前記入力値及び出力値に基づいて、逐次的にサンプル周期を進めて次のサンプル時刻の被予測状態量の動特性を予測計算する。
(もっと読む)
需要予測装置、需要予測方法及び需要予測プログラム
【課題】環境条件を考慮した需要予測において、環境条件の変化に応じた高精度な需要予測を実現すること
【解決手段】プラントの制御システムにおける需要予測装置であって、需要予測の更新要求に基づき、トレンドDBA9から、予測トレンド候補B6を抽出する現在値比較部A2と、予測トレンド候補B6から予測トレンドB7を選択するトレンドデータ比較部A3とを含み、現在値比較部A2若しくはトレンドデータ比較部A3は、選択されている予測トレンドB7と現在トレンドB3との差が大きくなることを認識して更新要求を発信することを特徴とする。
(もっと読む)
関数生成装置、及び関数生成方法
【課題】計算量を低減しながらも、不適切な近似目的関数が作成されてしまう確率を低減する関数算出装置及び関数算出方法を提供する。
【解決手段】制御対象の制御モデルを更新するために与えられる分析用データを用いて、前記制御モデルを最適制御するための目的関数を近似した近似目的関数を算出する関数算出装置である。目的関数に含まれる複数の入力変数のうち、非制御対象である非制御変数を代表値に固定することで、分析用データを低次元空間に射影する低次元空間射影部221と、分析用データの空間点から非制御変数を代表値とする空間点までの距離に応じた距離指標を算出する距離指標算出部222と、距離指標に基づいて、制御対象となる制御変数を入力変数とする近似目的関数を生成する関数生成処理部223と、を備えたものである。
(もっと読む)
路面を塗布するシステム及び方法
【課題】より高品質の作製路面をより確実に得られるように、路面を塗布する既知のシステム及び方法を改善する。
【解決手段】路面を塗布するシステムは、1つ又は複数の調整パラメタを其々有する複数の操作部品9と、そこから調整パラメタを操作部品9に伝達する開ループ制御装置17を備える。本発明によるシステムは、測定量22を考慮に入れて、少なくとも1つの指定した目標値26を得るために、最適調整パラメタ18を決定し、複数の最適調整パラメタ18を提示する命令データセットを生成し、複数の最適調整パラメタ18を提示する当該命令データセットを開ループ制御装置17に伝達するように構成する閉ループ制御システム25を特徴とする。また、本発明は、路面を塗布するシステム、特に道路仕上げ機を制御する方法にも関する。
(もっと読む)
オンラインモデル同定を用いたモデル予測制御方法および装置
【課題】操業条件の変更ならびにプロセス特性の変化に対しても制御性能を維持できる、オンラインモデル同定を用いたモデル予測制御方法および装置を提供することを目的とする。
【解決手段】プロセス動的モデルを用いて将来の挙動を予測し最適な制御を行う、オンラインモデル同定を用いたモデル予測制御方法であって、モデル予測制御演算実施にあたっては、用いるプロセス動的モデルを実操業データに基づいてモデル再同定を毎回行う。
(もっと読む)
プラント制御装置、そのモデル予測制御装置
【課題】制御性能の低下を防ぎつつメモリ使用量を削減する。
【解決手段】行列縮約部12を新たに設ける。行列縮約部12は、2次計画問題定式化部11が生成した行列を縮約し、縮約後の行列をメモリにセットすることで最適化計算部13に渡す。この行列の縮約は、目標値に関する行列は一切削除せず、制約条件に関する行列のみ、その一部を削除することで実現する。
(もっと読む)
プロセスモデルの高速同定および生成
【課題】プロセスモデルの高速同定および生成を提供する。
【解決手段】高速プロセスモデル同定技術は、比較的短期間でプロセス出力の初期応答からプロセス入力の変化までの積分ゲイン及びプロセス無駄時間の推定値を構築することで、プロセス入力とプロセス出力との間の動的関係を同定する。積分ゲインおよび無駄時間値が、多くの異なる種類のプロセスのいずれかに対して完全なプロセスモデルを生成するために使用される。これらプロセスモデルは、プロセスシミュレーションを実行するために非常に高速で使用することができるか又は制御目的で使用することができ、プロセスモデルを使用するかそれに依存するプロセス制御システムを従来よりもはるかに高速でオンライン化することができる。さらに、高速モデリング技術を使用したプロセスループを制御する制御装置が、低速プロセスの制御を実行する上で非常に有用である。
(もっと読む)
プラントシミュレータ
【課題】統計モデルを用いて高精度のシミュレーションを行うことができるプラントシミュレータ等を提供する。
【解決手段】厳密モデルを使用して、プラントから得られるプラントデータに基づく前記プラントのシミュレーションを実行する厳密モデルシミュレーション手段と、統計モデルを使用して、前記プラントのシミュレーションを実行する統計モデルシミュレーション手段と、を備える。前記統計モデルシミュレーション手段は、前記プラントから得られるプラントデータに加えて、前記厳密モデルシミュレーション手段によるシミュレーションから得られる仮想的なプラントデータに基づいて前記プラントのシミュレーションを実行する。
(もっと読む)
適応制御装置
【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
プロセス制御システムにおける適応推定モデル
【課題】 プロセスパラメータの測定値を用いて予測モデルの出力を適応的に調節すること。
【解決手段】 適応推定モデルは、プロセスパラメータを推定する出力を生成し、プロセスの動作中の調節された推定プロセスパラメータを生成すべく、前記推定モデルの出力を一又は複数の測定プロセスパラメータと結合するように構成されたニューラルネットワーク又は自然モデルのような標準的な推定モデルを備える。前記適応推定モデルは、前記推定モデル自体をリフォームすることなく、処理能力及び時間の重要でない増大のみを要して、プロセス変数の推定における非線形及び線形誤差を低減又は補正する。
(もっと読む)
先進的プロセス制御(advancedprocesscontrol)と実時間最適化(real−timeoptimization)との経済性に基づく協調
先進的プロセス制御と製造プロセスの実時間最適化とを協調させるためのシステムおよび方法が、提供される。システムおよび方法は、制御され最適化されるべき製造プロセスに対応するプロセスデータおよび経済的データを受け取る。プロセスデータ、経済的データおよびプロセスの非線形定常状態モデルに基づいて、経済的目的関数が、実時間最適化モジュールによって計算される。その後、引き下げられた次数の、経済的目的関数の非線形近似が、実時間最適化モジュールによって計算され、先進的プロセス制御モジュールに送られる。先進的プロセス制御モジュールは、制約された経済最適に向けて製造プロセスを制御するために、引き下げられた次数の、経済的目的関数の非線形近似を使用する。 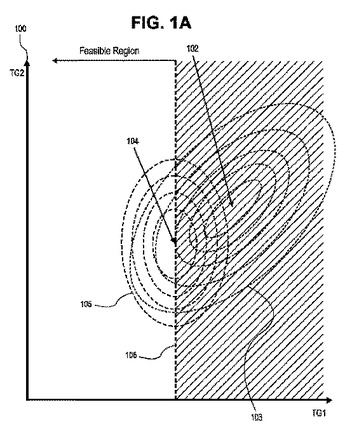 (もっと読む)
(もっと読む)
自動チューナおよび制御要素をチューニングする方法
【課題】分散化制御機能を有するプロセス制御ネットワーク内で制御要素をチューニングするのに用いられる自動チューナを提供する。
【解決手段】自動チューナは、制御要素62が動作している第1のフィールド装置44内に位置した第1のチューニング要素66と、通信ネットワークによって第1の装置と通信する異なる装置14内に位置する第2のチューニング要素71とを含む。第1のチューニング要素は、自動チューニング手続きの間にデータを集め、プロセス特性を決定し、通信ネットワークによって、決定されたプロセス特性を第2のチューニング要素に伝える。第2のチューニング要素は、送信されたプロセス特性に基づいて制御要素のための新しいチューニングパラメータを決定し、通信ネットワークによって、これを制御要素に送り、それにより、制御要素を再チューニングする。
(もっと読む)
多段プロセスとその制御
多段プロセスを制御する方法を提供する。本プロセスは、原料から中間製品を生成する複数の第1段階プロセスと中間製品から最終製品を生成する複数の別段階プロセスとを含む。第1段階プロセスは複数の中間プロセスを含み、別段階プロセスは最終製品を生成する複数の最終プロセスを含む。中間制御装置は最終製品EPの1つまたは複数の製品特性に応じて第1段階プロセスを制御し、別の制御装置FCは中間製品の製品特性に応じて別段階プロセスを制御する。多段プロセスは、最終プロセスと中間プロセスのそれぞれにプロセス値を割り当てる工程を更に含む。中間制御装置ICは、最終製品を生成するための全体プロセス値を最適化するように中間プロセスの動作を制御する。最終制御装置FCは全体プロセス値を最適化するように中間制御装置ICの動作に応答する。 (もっと読む)
化学的エンジニアリング工程を制御する明確なスイッチを有する二自由度制御方法
本発明は、プロセスエンジニアリング工程の閉ループ制御を実行する方法に関し、目標値の軌跡が閉ループ制御変数に提供され、プロセスの閉ループ制御変数及び更なる状態変数が検出され、制御誤差及びこれに基づく閉ループ制御操作変数が制御アルゴリズムによって算出され、加えてパイロット制御操作変数が決定され、生成操作変数が、閉ループ制御操作変数及びパイロット制御操作変数から算出され、プロセス中に設定される。制御アルゴリズム及びまたはパイロット制御の構造は、閉ループ制御変数、更なる状態変数及び/または目標値の軌跡の関数として変更される。更に、本発明は、閉ループ制御装置及び本方法を実行するコンピュータプログラムに関する。 (もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置
【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
41 - 60 / 234
[ Back to top ]