
Fターム[5H004GB01]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | プラント、プロセス制御 (380)
Fターム[5H004GB01]の下位に属するFターム
Fターム[5H004GB01]に分類される特許
21 - 40 / 234
制御装置及び制御方法
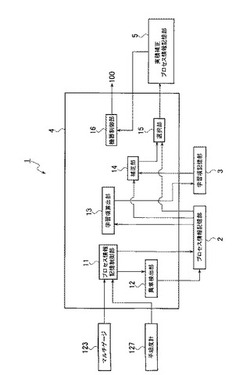
【課題】一方の測定器から他方の測定器へ切り替えられた場合においても、測定値を突然変化させることなく熱間圧延装置の制御を適切に継続する。
【解決手段】第1のプロセス値として測定するマルチゲージ123(第1の測定部)と、第2のプロセス値として測定する平坦度計127(第2の測定部)と、マルチゲージ123(第1の測定部)の異常を検出する異常検出部12と、プロセス情報を記憶するプロセス情報記憶部2と、第2のプロセス値を補正するための学習項Zを算出する学習項算出部13と、学習項Zを記憶する学習項記憶部3と、補正板幅値(補正プロセス値)を生成する補正部14と、異常が検出された時点以前における第1のプロセス値と、異常が検出された時点以降における補正板幅値(補正プロセス値)とを選択する選択部15と、選択されたプロセス値及び補正プロセス値に基づいて、圧延ラインの制御を行う機器制御部16とを備える。
(もっと読む)
システム同定装置及び同定方法

【課題】プラントの動特性変化を、オペレータにわかりやすいモデルパラメータを用いて、定量的に、日常の制御計算に影響を与えない低計算負荷でプラント操業運転を停止することなく同定するシステム同定装置及び同定方法を提供する。
【解決手段】応答データ記憶装置10から同定処理駆動イベントを検出する同定処理駆動イベント検出装置40、検出された同定処理駆動イベント前後の応答データを切り出す応答データ切り出し装置50、切り出された応答データをもとにプラント動特性変化を同定する動特性変化同定装置60、同定された動特性変化分が与えられた動特性変化検出条件を満たすかどうかを判定し、該条件を満たす場合には表示出力指示を行う動特性変化検出装置70を備える。
(もっと読む)
制御装置および制御方法
【課題】制御動作が不安定化するパラメータ設定が行なわれてしまう恐れを低減する。
【解決手段】制御装置は、設定値SPの変更による過渡応答時に有効な操作量上限値OHsを記憶する過渡操作量上限値記憶部3と、定常運転時に有効な操作量上限値OHgを記憶する定常操作量上限値記憶部4と、設定値SPの変更を検出する設定値変更検出部5と、過渡応答の完了を検出する過渡応答完了検出部6と、設定値SPの変更時点から過渡応答の完了時点までの時間帯では操作量上限値OHsを制御演算で使用する操作量上限値OHとして設定し、それ以外の時間帯では操作量上限値OHgを操作量上限値OHとして設定する操作量上限値切り替え部7と、制御演算により操作量MVを算出し、操作量MVを操作量上限値OH以下に制限する上限処理を実行して出力する制御演算部8とを備えている。
(もっと読む)
プロセス制御システムにおける統合されたアドバンスド制御ブロック
【課題】モデル予測制御のような多入力/多出力制御を実行するアドバンスド制御ブロックを提供する。
【解決手段】アドバンスド制御ブロック56は、汎用制御論理102を有し、プロセス出力および入力に通信可能に接続された制御入力および出力とを有する初期機能制御ブロックを作成することで形成が開始される。制御ブロック内の波形ジェネレータ101は、プロセスモデル104を作成する際に用いられるように設計された励起波形を用いて制御ブロック出力によってプロセス入力の各々を体系的にアップセットする。データ収集ルーチン100は、プロセス入力各々の波形にたいするプロセス出力各々の応答を示すデータを収集する。収集されたデータからプロセスモデルを生成し、プロセスモデルから制御論理パラメータを作成する。制御論理パラメータおよびプロセスモデルは制御ブロックにダウンロードされ、アドバンスド制御ブロックの形成を完了する。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
用役設備の最適運転システム
【課題】製造工場における用役設備の運転において、需要予測の誤差が大きい場合や制御周期の時間内で用役需要が急激に変化する場合でも、用役設備を高効率で運転し、用役の需要と供給を一致させることにより、CO2排出量を削減する用役設備の最適運転システムを提供する。
【解決手段】用役需要予測結果に基づいてCO2排出量を最小化するように用役設備の最適運転計画を実施し、各用役毎に起動する用役設備の中で少なくとも1台の用役設備は負荷率を設定せず、他の用役設備は負荷率を設定して用役設備を運転し、各用役毎に、需要予測値と実績値の差が予め設定した許容値以上になった場合は、実績値に基づいて用役需要予測値を補正して最適運転計画を実施し、負荷率を設定しない設備以外の設備の負荷率を再度設定する。
(もっと読む)
データ抽出装置及びデータ抽出方法
【課題】オペレータの負担なく、シミュレーションモデルのファインチューニングに適した実測データを容易に抽出できるデータ抽出装置及びデータ抽出方法を提供する。
【解決手段】 プラントの運転状況を予測してプラントの制御を行うシミュレーションモデルであって、前記シミュレーションモデルに入力する実測データのデータ抽出装置10において、特徴解析手段104は、プラントから取得した複数の実測データの時系列データの形状特性と、シミュレーションモデルから出力された状態量のシミュレーションデータの時系列データの形状特性を解析する。抽出手段106は、特徴解析手段104による解析の結果、シミュレーションデータの形状特性と最も類似する実測データを実測データベースから抽出する。
(もっと読む)
電力使用量予測装置および電力使用量予測方法
【課題】ヒータの昇温能力の経時変化を電力使用量の予測に反映する。
【解決手段】電力使用量予測装置は、ヒータの加熱する能力を表すヒータ能力係数HPを記憶するヒータ能力係数記憶部5と、制御対象を単位温度加熱するのに必要な時間を表す昇温時間係数THを記憶する昇温時間係数記憶部6と、ヒータの電力使用量を予測する電力使用量予測部7と、操作量上限値OHを取得する操作量上限値取得部8と、昇温を開始した後に操作量MVが操作量上限値OHに到達している時間帯において制御対象を単位温度加熱するのに必要な時間を表す実績値THxを求める時間実績計測部11と、実績値THxに基づく補正が昇温時間係数THを大きくする補正になると判定した場合のみ、実績値THxを用いて昇温時間係数THを補正する昇温時間係数補正部12とを備える。
(もっと読む)
プラント制御装置及び蒸気使用プラントの制御方法
【課題】蒸気負荷における蒸気の需要量が変動しても、効率を低下させることなく、蒸気使用プラントの蒸気発生装置を運転できるプラント制御装置及び蒸気使用プラントの制御方法を提供することを課題とする。
【解決手段】ボイラ10と、ボイラ10で発生した蒸気を貯蔵する蒸気アキュムレータ30と、蒸気アキュムレータ30に貯蔵される蒸気が供給される蒸気負荷20と、を含んで構成される蒸気使用プラント1に備わり、蒸気負荷20における蒸気の予測需要量を予測するとともに予測需要量に基づいてボイラ10の運転パターンを決定し、運転パターンに基づいてボイラ10を運転するプラント制御装置100及び蒸気使用プラント1の制御方法とする。そして、予測需要量の蒸気が発生するボイラ10の負荷率が、予め設定される下限負荷率より低くなる時間帯でのボイラ10の運転時間が短くなるように、運転パターンを決定することを特徴とする。
(もっと読む)
適応制御装置の設計方法
【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
バッチ特性推定のための装置及び方法
【課題】過去の値や現在の状態推定値に基づいて、バッチプロセスの特性を正確に推定することは現在でも困難である。バッチプロセスの特性の推定値を生成する方法を提供する。
【解決手段】バッチプロセスの特性の推定値を生成する方法及び装置は、そのバッチプロセスに関連する複数の反応速度の推定値を生成するために、ノンパラメトリックモデルを使用する。各反応速度の推定値は、例えばバッチプロセスの間の特定の時間に対応している。複数の反応速度の推定値は、次に、その特定の時間でのそのバッチの特性の推定値を生成するために積分される。
(もっと読む)
簡易手動自動切り替え装置
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム
【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
プロセス制御システム
【課題】分散型制御装置による制御からに多変数モデル予測制御装置による制御への切り替えを、1制御周期の欠落もなく実行することができるプロセス制御システムを実現する。
【解決手段】プロセス出力値を共通に入力する分散型制御装置と多変数モデル予測制御装置とを、双方のステータス変更操作により切り替える機能を有し、分散型制御装置が稼動するスタンドバイモードのステータスから多変数モデル予測制御装置が稼動するコントロールモードのステータスに切り替える際に、多変数モデル予測制御装置は、所定の制御周期で分散型制御装置と多変数モデル予測制御装置に設定されているステータスの読み込み処理と、双方のステータスをコントロールモードに一致させるステータス等値化処理と、プロセスの制御演算処理と、演算結果を分散型制御装置側に渡す書き込み処理とを制御周期の期間中に少なくとも1回の追加ステータス等値化処理を実行する。
(もっと読む)
制御器の構成方法、システム及びプログラム
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
オートチューニング実行装置および方法
【課題】片側干渉が発生するマルチループ制御系において、効率よく正確なATを実行する。
【解決手段】オートチューニング実行装置は、リミットサイクル方式のATを実行するAT実行部1と、干渉を与える側の制御ループを主制御ループとして予め記憶する主制御ループ登録部2と、主制御ループ以外の制御ループのAT実行中に、この制御ループに発生した制御量の上下動幅を検出する上下動幅検出部3と、主制御ループのAT実行中に主制御ループ以外の制御ループに、ループ間干渉によって発生した制御量の最大変動量を検出する最大変動量検出部4と、最大変動量と上下動幅に基づき主制御ループのAT実行時における操作量上限値を算出してAT実行部1に設定する上限値算出部5とを備えている。
(もっと読む)
PID制御器の構成方法、プログラム及びシステム
【課題】プラントの事前情報が乏しく不安定系であっても、入力と出力が観測できれば準最適なロバストPID制御器を構成可能にする。
【解決手段】PID制御器の係数空間の中から、入出力データによって反証された組合せを除外して絞込みを行い、その係数候補群における各候補の評価関数履歴と全体での進化履歴の情報を共有させながら候補群を移動させ、同時に候補群近傍の係数空間探索を自動的に行いつつ、プラントと制御器の全体系におけるロバスト安定を実現する係数を非反証的に自動設計する機能を与える。各候補の評価関数履歴のうち最小となったPIDゲインと、候補群全体履歴のうち最小評価値になったPIDゲインの情報を記憶・共有しつつ、PSOにより、より良い中心を目指して候補群全体を移動させ、候補周辺探索と、その中からの反証候補除去を実行することで自動設計し、PSOによる候補群の各粒子の周辺探索候補に対しても非反証制御を行う。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
バッチプロセスを制御するためのシステムおよび方法
【課題】バッチプロセスを制御するためのシステムおよび方法が提供される。
【解決手段】バッチプロセスをシミュレートするために、第1原理モデルが用いられ、この第1原理モデルは、バッチプロセスを制御するために、多重入力/多重出力制御ルーチンを構成するのに用いられ得る。第1原理モデルは、実際のバッチプロセスの動作の間に測定することができず、または測定されないバッチ変数の推定値を発生することができる。このような変数の例としては、バッチプロセスの構成成分(例えば、生成速度、細胞成長速度等)の変化速度であってもよい。第1原理モデルおよびその構成された多重入力/多重出力制御ルーチンは、バッチプロセスの制御を容易にするために用いられ得る。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が指定された一定値を超えないように、かつ設定値への追従特性が損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、割当総電力PWの情報を受信する割当総電力入力部(10)と、各制御ループRiの操作量MViを現在値から特定の出力値にした場合の昇温時間TLを推定する昇温時間推定部(11)と、各制御ループRiの制御量PViを昇温時間TLの間に設定値SPiの変更に応じた量だけ変化させるのに必要な操作量である必要出力MUiを推定し、使用電力総量TWが割当総電力PWを超えない必要出力MUiを探索して、探索した必要出力MUiを各制御ループRiの操作量出力上限値OHiとして設定する電力抑制部(15〜19)と、制御ループRi毎に設けられた制御部(20−i)とを備える。
(もっと読む)
21 - 40 / 234
[ Back to top ]