
Fターム[5H004GB01]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | プラント、プロセス制御 (380)
Fターム[5H004GB01]の下位に属するFターム
Fターム[5H004GB01]に分類される特許
161 - 180 / 234
解の開始推定が実行不可能かつ一貫性のない二次計画法において、効力をもつ制約の良好な開始推定を利用するシステムおよび方法

【課題】初期推定(xf)が実行不可能な場合であっても、開始時に問題を緩和しないアルゴリズムが提供される。
【解決手段】従来の方法のかわりに、このアルゴリズムでは、有効制約集合の初期推定を使用して、問題を緩和せずにEQPを解く。この最初のEQPの解が最適ではないが実行可能な場合、これを実行可能な点の推定として使用することができる。これは、初期有効制約集合と一貫性のある実行可能な点であるという利点を有するが、従来の方法で使用される初期推定は、必ずしもそうではない。
(もっと読む)
制御装置

【課題】時間比例出力の分解能を落とすことなく、出力の応答を速くした制御装置を実現する。
【解決手段】制御対象を時間比例出力のON/OFF時間比で制御する制御装置に関する。 設定値と制御対象からの測定値との偏差をPID演算するPID演算部と、PID演算部の演算結果である制御出力値を順次積算していく積算部と、積算部の積算値により時間比例出力をONにするかOFFにするかの判定を行うON/OFF判定部と、ON/OFF判定部の判定値により時間比例出力をON/OFFする時間比例出力部とを設けた。
(もっと読む)
電空制御ループに対する初期条件が調整可能なリード・ラグ入力フィルタ装置
【課題】 弁体を制御弁の弁座か離隔させ、深刻な遅れがない状態で設定点へ移動させるためのシステムおよび方法を提供する。
【解決手段】制御ループの入力部と通信状態にあるリード・ラグフィルタの入力部への入力パラメータをユーザが選択する調節可能なものとすることにより、小さな振幅の入力が加えられた場合に、制御弁によるチューニング可能な応答を達成することが容易なものとなる。
(もっと読む)
制御対象のパラメータ同定方法
【課題】大掛かりなアルゴリズムを必要とせず、現場でオンラインの状態にあっても制御対象のパラメータを特定できるパラメータ同定方法を提供する。
【解決手段】数学モデルで近似できかつ伝達関数のパラメータが未知の制御対象を持つシステムにおいて、制御対象の伝達関数を数学モデルに基づいて状態変数線図に展開した状態変数制御ブロックを作成し、制御対象への入力uを状態変数制御ブロックにも入力し、当該状態変数制御ブロックの出力Ymと制御対象の出力Ypとの偏差eを求め、偏差eと偏差eの積分値または微分値とを一方に係数を掛けた上で加算し、当該加算値hが0より大きければ+1を、0より小さければ−1を出力するシグナム関数に入力し、シグナム関数の出力fを積分した積分値を状態変数制御ブロックの操作入力とし、状態変数制御ブロックの直達項乃至状態変数の係数を変化させる。
(もっと読む)
制御方法および制御装置
【課題】過渡状態における相対量の制御性と整定状態における制御の安定性とを両立させる。
【解決手段】特定の状態量を基準状態量とし、基準状態量との相対量が規定値を維持するよう制御される状態量を追従状態量とする。算出部6−1〜6−3は、内部入力値を基準状態量に対する第1の要素と相対量に対する第2の要素との和とし、基準状態量に対する制御演算用入力値の要素を第1の要素とし、相対量に対する制御演算用入力値の要素に係数Biを掛けた値を第2の要素として、追従状態量設定値を内部入力値に変換する。係数Bi切換判断部10は、追従状態量計測値PViが追従状態量設定値SPiから遠いときは係数Biとして第1の値を選択し、設定値SPiから近いときは、計測値PViの基準状態量計測値PVmへの追従性の度合が第1の値よりも弱い第2の値を選択する。
(もっと読む)
ボイラドラムの水位制御装置
【課題】ボイラドラム水位制御の性能を改善する。
【解決手段】水位制御器43はボイラドラム水位設定値と水位計4からの水位検出値との偏差を演算増幅し、その出力に蒸気流量計5からの蒸気流量値を加え、給水流量計2からの給水流量値を引いて給水調節弁3の開度指令値である操作量を出力する。フィードフォワード補償回路44〜48は、蒸気流量計5からの蒸気流量が入力する、蒸気流量からボイラドラムの水位変動までの動特性を打ち消す伝達関数が設定された補償関数回路44を有し、この補償関数回路44に蒸気流量から水位変動までの動特性を打ち消す伝達関数が設定されているので、水位変動が抑制される。そしてデッドバンド回路45により蒸気流量の変化率が大きく水位の変動が大きい場合に限りフィードフォワード補償回路が作動することになるので、蒸気流量が安定している場合の給水調節弁3の操作量の動作頻度を抑制可能となる。
(もっと読む)
制御装置および制御方法
【課題】マルチループの状態量制御系において定常偏差の絶対値を小さくする。
【解決手段】第1の制御ループについて設定値SP1と制御量PV1との偏差Er1を算出する偏差Er1算出部3−1と、偏差Er1を入力として操作量MV1を算出するPID演算部4−1と、偏差Er1に予め設定された倍率A1を乗算する倍率A1演算部6−1と、第1の制御ループとの間に干渉が存在する第2の制御ループの設定値SP2に倍率A1演算部6−1の乗算結果を加算して補正設定値SP2xを算出する加算部7−2と、補正設定値SP2xと制御量PV2との偏差Er2を算出する偏差Er2算出部3−2と、偏差Er2を入力として操作量MV2を算出するPID演算部4−2とを備える。
(もっと読む)
フィルタ装置、及びそれを用いたフィードバック制御装置
【課題】入力信号のうちノイズ等の無用な高周波成分を低減させながら、制御すべき周波数帯域の位相遅れが小さいフィルタ装置、及びそれを用いたフィードバック制御装置を提供することを目的とする。
【解決手段】入力信号の高周波ノイズを低減するフィルタ装置であって、入力信号を位相遅れ処理して位相遅れ信号を出力する一次遅れフィルタ部と、前記入力信号を微分処理して微分信号を出力する微分特性処理部と、前記位相遅れ信号と前記微分信号を加算して出力信号を得る加算処理部とを備えることを特徴とするフィルタ装置、及びそれを用いたフィードバック制御装置。
(もっと読む)
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
モデル同定装置
【課題】 エラーを含む周波数応答関数を基に伝達関数を同定する場合でも、エラーを考慮した精度の良い最小二乗解を得ることができ、また反復計算の過程での線形化誤差に影響されず、最小二乗解の精度の劣化を回避することができ、更に安定して収束解を得ること。
【解決手段】 第1の連立方程式作成部16〜第1の総合最小二乗解計算部22の各部にて、周波数応答関数H(z)が示す周波数特性を定数とし、同定する伝達関数G(z)を構成する分母多項式及び分子多項式の未知係数を未知変数とした連立方程式に対して第1の総合最小二乗解xを求める。残余計算部24でその解xを基に残余を計算し、第2の連立方程式作成部26〜第2の総合最小二乗解計算部32の各部にて、その計算された残余から残余に対する第2の総合最小二乗解eを計算し、第2の総合最小二乗解計算部32にて、2つの解x,eの和を真の総合最小二乗解yとする処理を行う。
(もっと読む)
制御装置
【課題】ワインドアップ現象を起こさずに飽和要素を含む制御対象に対し制御機能を限界まで発揮する。
【解決手段】線形制御器5が、制御対象2の操作量を生成するための線形操作量Ueqを生成すると共に、非線形操作量Unlに基づいて線形操作量Ueqの大きさを制限するの。これにより、非線形操作量Unlの大きさを考慮する必要がなくなるので、非線形制御器6はワインドアップしなくなる。またこの結果、非線形制御器6でワインドアップ現象を考慮する必要がなくなるので、線形制御器5でのみ飽和時の影響を考慮すればよくなる。
(もっと読む)
制御パラメータ決定方法及び装置
【課題】 FF+PID制御を行いオーバーフローすることなく迅速に目標値に達成するための制御パラメータを求めることのできる制御パラメータ決定装置を提供すること
【解決手段】 初期操作量ゲイン学習部3は、操作量を複数の区分に分割し、実際の制御中に取得した操作量以下の区分の存在時間を求め、閾値以上の存在時間の区分の中で最も大きい区分の操作量の下限値を求める。FFゲイン学習部4は、目標値に達した際の操作量と、制御終了時の操作量に基づいてFFゲインを求める。そして、初期操作量ゲインは、上記求めた下限値に最大操作量を掛けたものを目標値で割って得られた値と、FFゲインを比較し、大きい値を初期操作量ゲインに決定する。これにより、FF+PID制御するコントローラにおける初期操作量ゲインとFFゲインを設定する。
(もっと読む)
プラント制御システム用オンディマンドの自動チューナ
自動的に制御システムをチューニングするための方法であって、その方法は、入力励起に応答して、少なくとも1つのプラントサブシステムに関して目標ループの伝達関数を選択するステップと、プラントサブシステムの伝達関数に関して少なくとも1つのフィットエラー基準を選択するステップと、自動的に、入力励起を入力し、プラントサブシステムの伝達関数を目標ループの伝達関数にチューニングするステップと、を含む。チューニングするステップは、プラントサブシステムの制約に従って決定される複数の帯域幅から、プラントサブシステムの伝達関数の帯域幅を自動的に選択するステップと、入力励起をプラントサブシステムに入力するステップと、入力励起に応答して、目標ループの伝達関数に対してプラントサブシステムの伝達関数のフィットエラーを決定するステップと、フィットエラー基準に従って帯域幅の選択を続行するステップと、を含む。  (もっと読む)
(もっと読む)
制御器、制御方法および制御プログラム
【課題】 計算量を減少させて、実タスクへ適用可能な自然方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】 制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果によりTD誤差を求め、TD誤差近似器を更新して、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
プロセス制御装置における非干渉制御方法、およびプロセス制御装置
【課題】 自動制御を行う3系列以上の制御ループに容易に適用することができ、かつ各制御ループの相互干渉を十分に抑えることが可能な非干渉制御方法を提供する。
【解決手段】 少なくとも3入力3出力以上の入出力変数を有するプロセス2と、このプロセス2と共に3系列以上の制御ループを構成する制御系3を有する。この制御系3は、3系列以上の制御ループの間に各制御ループ間の相互干渉を打ち消す非干渉要素29を備える。この非干渉要素29は、各制御ループの伝達関数および他の制御ループから干渉してくる干渉要素の伝達関数をむだ時間を含んだ一次遅れ系の応答形に近似して算出したものとする。
(もっと読む)
石油精製プラントのパラメータ予測装置及びパラメータ予測方法
【課題】予測時間及びモデル作成に用いる第一及び第二パラメータについて最適化された予測モデルを構築し、この予測モデルを用いて精度良く石油精製プラントの特定のパラメータを予測する。
【解決手段】入力手段と、測定手段と、パラメータ記憶手段と、モデル作成条件に基づいて測定された第一及び第二パラメータの少なくとも一部にPLS(Partial Least Squares)解析を行い、予測時間並びにモデル作成に用いる第一及び第二パラメータに関して最適化された予測モデルを作成するモデル作成手段と、モデル記憶手段と、出力手段とを有することを特徴とする予測装置。
(もっと読む)
モデル同定装置
【課題】 対象システムのモデルを表す伝達関数算出の精度を向上させると共に、計算収束性を向上させることによってシステム同定時間を短縮すること。
【解決手段】 連立方程式作成部18で、周波数応答関数H(z)が示す周波数特性を定数とし、同定する伝達関数G(z)を構成する分母多項式及び分子多項式の未知係数を未知変数とした連立方程式に対して最小二乗解xを求める。計算収束判定部40で、解xを代入して得られる伝達関数の周波数応答特性と周波数応答関数の周波数特性との相対偏差が設定された閾値を下回っているか、又は下記反復計算過程の前回の計算で得られた解と今回得られた解の相対誤差が設定した閾値を下回っているかを判定する。下回っていない場合に重み更新部24で解xの分子多項式のみで重みwを更新して再度各部18,20,22,24にて反復計算を行う。下回っていた場合、反復計算を打ち切り伝達関数G(z)を得る。
(もっと読む)
アンチワインドアップコントローラ
【課題】 コントローラ設計時にアンチワインドアップ補償のための特別な設計が不要であり、かつ制御演算実行時の計算負荷が小さくて演算量が安定しているアンチワインドアップコントローラを提供する。
【解決手段】 コントローラからの操作量を監視して操作量飽和の発生が予測される時に、実時間操作量が操作量の制限値(上限と下限のいずれか一方又は両方)と等しくなるように仮想時間操作量から時間軸関数値を算出して時間軸変換を行うことにより、操作量飽和をそもそも発生させないようにする。そのため、仮想時間操作量が操作量の制限値を満足しているかどうかの判定により操作量飽和を生じていない場合には、時間軸関数値を1とし、操作量飽和を生じていると判定された場合には、実時間操作量の要素の少なくとも1つが前記操作量の制限値の対応する要素と等しくなるように仮想時間操作量から時間軸関数の値を算出し、その関数値に基づいて仮想時間操作量を、操作量飽和を生じていない実時間操作量に変換する。
(もっと読む)
操作変数選択装置、操作変数選択方法、操作変数選択プログラムおよびそれを記録したコンピュータ読み取り可能な記録媒体
【課題】 品質改善のために操作すべき操作変数を、品質のばらつきと操作コストのバランスを考慮して選択する。
【解決手段】 対象プロセスの操作変数の変化が該対象プロセスの品質変数に与える影響を表す項、上記操作変数と上記品質変数の間の非線形性を表す項、操作に関わるコストおよびペナルティを表す項、これら3項の任意の非線形関数として与えられる評価関数を、各操作変数について演算する評価関数演算部14と、評価関数演算部14の演算結果から、上記評価関数を最小化する操作変数を選択する操作変数選択部15とを備える。
(もっと読む)
調整された横方向および縦方向制御のためのモデル予測制御装置
1枚の材料シートを製造するためのシート製作機における縦方向MDおよび横方向CDアクチュエータの調整された制御のためのプロセスが開示される。本プロセスは、シート測定データを収集するために規則的な間隔で複数のシート特性を測定することを含む。シート測定データは、複数のシート特性測定値配列を確立するために処理され、その配列は、次いで、共通解像度にマップされる。共通解像度シート特性測定値配列は、1つのより大きい1次元共通解像度測定値配列へと結合される。共通解像度測定値配列およびアクチュエータ設定値の過去の変更配列は、抄紙機プロセス・モデル状態オブザーバへの入力として使用されて、シート製造プロセスの推定される現在の内部状態が生成される。複数の未来のシート特性目標配列は結合されて、1つの目標配列となる。ウェブ製造プロセスの推定される現在の内部状態配列、および抄紙機プロセス・モデルは、シート特性の未来の予測配列を生成するために用いられる。シート特性の未来の予測配列と、目標配列と、オブジェクト関数の重みと、最後のアクチュエータ設定値と、ハード制約とが、オブジェクト関数に入力され、その関数を解くことによりシート製作プロセスの調整されたMDおよびCD制御のためのアクチュエータ設定値の最適な変更を得ることができる。 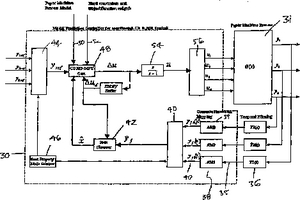 (もっと読む)
(もっと読む)
161 - 180 / 234
[ Back to top ]