
Fターム[5H115TO12]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 電気的変量検出 (4,425) | 電流 (1,610)
Fターム[5H115TO12]に分類される特許
61 - 80 / 1,610
ハイブリッド自動車
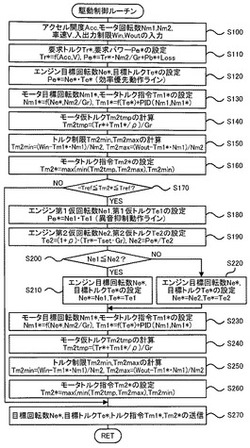
【課題】電動機に接続されたギヤ機構での異音の抑制と内燃機関の運転効率の低下の抑制との両立を図る。
【解決手段】効率優先運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御すると第2モータから出力されるトルクが異音トルク範囲内となるときには(S170)、異音抑制動作ラインと要求パワーPe*とを用いて得られる第1仮運転ポイントと(S180)、第2モータから出力されるトルクが異音トルク範囲の上限よりも大きくなると共に要求パワーPe*がエンジンから出力されるよう設定される第2仮運転ポイントと(S190)、のうち回転数が小さい方の運転ポイントでエンジンが運転されると共に要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S200〜S270)。
(もっと読む)
電力制御装置

【課題】インバータと、リアクトル、スイッチング素子および整流素子を有する昇圧コンバータと、平滑用の第1および第2コンデンサとを備えた電力制御装置において、昇圧コンバータのリアクトルと第1および第2コンデンサの劣化を個別に判定可能とする。
【解決手段】電力制御装置20は、第1リレー41および第1コンデンサ31とリアクトルLとの間に配置された第2リレー42と、昇圧コンバータ23のリアクトルLとダイオードD1との間に配置された第3リレー43と、リアクトルLに直列に接続されると共にトランジスタTr2に並列に接続された抵抗素子33とを備える。
(もっと読む)
電気車制御装置
【課題】 推定回転子位置が真の位置と異なった場合に、インバータの過電流や温度上昇を抑制することが可能な電気車の駆動制御装置を提供する。
【解決手段】 一実施形態に係る電気車制御装置は、直流を任意周波数の交流に変換し、同期電動機4を駆動する電力変換器3と、同期電動機4の回転速度を演算により推定する速度演算部67と、入力されるトルク指令及び速度演算部67により推定された回転速度に基づいて、電力変換器3の出力電圧を制御する制御部61〜64と、速度演算部67により推定された回転速度が異常な値となったことを判別し、制御部61〜64に異常が検出されたことを示す信号を出力する異常判別部73とを具備する。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の温度が低いときにその蓄電割合が過剰に高くなるのを抑制する。
【解決手段】電池温度Tbが所定温度未満のときに、電池温度Tbが所定温度以上のときに比してモータからの動力だけを用いて走行する電動走行が行なわれにくくなると共にエンジンからの動力とモータからの動力とを用いて走行するハイブリッド走行が行なわれやすくなるものにおいて、バッテリの蓄電割合SOCに応じて蓄電割合調整用パワーPbsocを設定し(S300)、電池温度Tbが所定温度未満のときに所定温度以上のときに比して小さな値を嵩上げパワーPbηに設定し(S310)、これらの和をバッテリの充放電用パワーPb*に設定する(S320)。そして、ハイブリッド走行によって走行するときには、充放電用パワーPb*を走行用パワーに加えたパワーがエンジンから出力されながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
車両およびその制御方法
【課題】衝突が発生したときに、インバータや三相交流電動機をより適正に保護しながら、平滑コンデンサに蓄えられた電荷を速やかに放電する。
【解決手段】衝突が検知された後に、インバータ41,42の上アームトランジスタのすべてがオフされると共に下アームトランジスタのすべてがオンされる。また、その後にモータMG1,MG2に逆起電力が発生していないときには、インバータ41,42の上アームトランジスタの少なくとも何れか一つに完全オン時のゲート電圧V1よりも低いゲート電圧V2が印加されると共にインバータ41,42の下アームトランジスタのうちのゲート電圧V2が印加された上アームトランジスタに直列に接続されたものがオンされる。
(もっと読む)
電動車両
【課題】正転・逆転のいずれか一方の回転方向のみに対して効率が高められた電動機を駆動力源として、生産性の低下やコストアップを招くことなく、効率を向上させることが可能な電動車両を提供すること。
【解決手段】少なくとも2つの電動機5,6を備えた電動車両Veにおいて、電動機5,6を、一方の回転方向への力行時における効率が他方の回転方向への力行時における効率および回生時における効率よりも高くなるように構成するとともに、後輪の駆動力を発生させる電動機6を、前進用電動機6として正転力行時における効率が逆転力行時における効率および回生時における効率よりも高くなるように配置し、前輪の駆動力を発生させる電動機5を、後進・回生用電動機5として逆転力行時における効率および回生時における効率が正転力行時における効率よりも高くなるように配置した。
(もっと読む)
電気駆動車両
【課題】車両のピッチング振動を大きくさせることなく駆動輪のスリップを抑制できる電気駆動車両を提供すること。
【解決手段】電動機1,4と、電動機により駆動される駆動輪3,6と、駆動輪にスリップが発生するときに電動機のトルクを低減させ、当該スリップ解消後に電動機のトルクを回復させる電動機制御装置40とを備えた電気駆動車両において、車両に発生するピッチング振動の振幅を検出するピッチング検出装置26を備え、スリップ解消後に電動機制御装置が一定時間に回復させる電動機のトルク量は、ピッチング検出装置で検出された振幅Aが判定値A1以下の場合と判定値A1を超える場合とで異なっている。
(もっと読む)
車両用蓄電部保護システム
【課題】車両用蓄電部保護システムにおいて、蓄電部の電圧を検出する電圧センサの異常が発生した場合でも、蓄電部の過電圧を有効に回避しつつ車両の継続走行を可能とすることである。
【解決手段】車両用蓄電部保護システムである回転電機駆動システム30は、バッテリ16の電圧を昇圧するDC/DCコンバータ42と、制御部36と、バッテリ16の端子間電圧を検出する第1電圧センサ50と、DC/DCコンバータ42の低圧側、高圧側の電圧をそれぞれ検出する第2電圧センサ52及び第3電圧センサ54とを備える。制御部36は、バッテリ16の現在SOCを取得する手段と、バッテリ16の充電量を制御する際の制御中心となる制御中心SOCを設定する手段と、第1電圧センサ50に異常が発生したと判定された場合に、現在の制御中心SOCを、通常時の制御中心SOCよりも低くする手段とを含む。
(もっと読む)
電動車両の電気システムおよびその制御方法
【課題】電動機の温度上昇の抑制と、車両駆動力の確保とを両立するように、コンバータの出力電圧を適切に設定する。
【解決手段】
コンバータ15の出力電圧VHは、モータジェネレータMG1を駆動制御するインバータ20およびモータジェネレータMG2を駆動制御するインバータ30に対して共通に与えられる。制御装置50は、モータジェネレータMG1,MG2の動作状態に応じて、出力電圧VHの指令値を設定する。出力電圧VHの電圧指令値は、走行制御に基づいて決められたモータジェネレータMG1,MG2の動作点に従った出力を確保するためのVH下限値と、モータジェネレータMG1,MG2の当該動作点でのモータ損失を最小とするためのVH候補電圧とのうちの最大値に従って設定される。
(もっと読む)
車両用コンバータ装置および車両用コンバータの制御方法
【課題】過電圧回避制御実施後に昇圧コンバータが再び過電圧状態になるのを確実に防止する。
【解決手段】車両用コンバータ装置10は、昇圧コンバータ14と、昇圧コンバータ14を制御する制御装置20とを備える。制御装置20は、昇圧コンバータ14について過電圧回避制御が実行されているときに通常昇圧制御への復帰に際し昇圧コンバータ14をシャットダウンするシャットダウン実行部(S36)と、通常昇圧制御への復帰時にモータ18の誘起電圧によって昇圧コンバータ14が過電圧状態とならないようにするためにシャットダウン中に検出されるシステム電圧VHの時間変化率ΔVHに基づいて通常昇圧制御への復帰の可否を判定する第1判定部(S38)と、モータ回転数に基づいて通常昇圧制御への復帰を再度試行する第2判定部(S46)とを含む。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の蓄電割合の管理の様子を運転者が把握できるようにする。
【解決手段】エンジンから出力される動力とモータから入出力される動力とを用いて走行するハイブリッド走行によって走行するときには、バッテリの蓄電割合SOCが目標割合SOC*に近づくと共に要求トルクによって走行するようエンジンと二つのモータとを制御する。そして、このときには(S710)、バッテリの蓄電割合SOCを示す蓄電割合情報と目標割合SOC*を示す目標割合情報とをディスプレイ90に表示する(S730)。これにより、蓄電割合情報と目標割合情報とを運転者が把握できるようにすることによってバッテリの蓄電割合SOCの管理の様子を運転者が把握できるようにすることができる。
(もっと読む)
駆動装置
【課題】昇圧コンバータのリアクトルに流れる電流を検出する2つの電流センサの少なくとも一方に異常が生じているのをより適正に判定する。
【解決手段】昇圧コンバータ30のリアクトルLに流れる電流を検出する2つの電流センサ47a,47bにより検出された電流の差の絶対値に所定のローパスフィルタを適用して偏差ΔILを演算し、演算した偏差ΔILが閾値Iref以上のときに2つの電流センサ47a,47bの少なくとも一方に異常が生じていると判定する。そして、この閾値Irefは、モータMG1,MG2から出力すべき目標パワーP*の絶対値やモータMG1,MG2から出力されている出力パワーPの絶対値,モータMG1,MG2からのトルクTm1,Tm2の各絶対値,バッテリ26の充放電電流IBの絶対値,高電圧系の電圧VHが大きいほど大きくなる傾向に従って設定される値である。
(もっと読む)
電動車両用制御装置
【課題】力行状態と回生状態とが切り替わる零クロス時において、各走行モードに応じた電動機の制御が可能な電動車両用制御装置を提供する。
【解決手段】電動車両10用の制御装置34では、電動機12の目標駆動力について、回生側の零近傍値である第1零クロス閾値と、力行側の零近傍値である第2零クロス閾値とを設定し、第1零クロス閾値と第2零クロス閾値との間の零クロス域70の幅を、電動車両10の出力応答性を優先する第1走行モードのときよりも、電費を優先する第2走行モードのときに広くする。また、電動機12の駆動力の変化を、目標駆動力が零クロス域70外であるときよりも、前記目標駆動力が零クロス域70内にあるときに緩やかにして電動機12を制御する。
(もっと読む)
駆動装置
【課題】インバータと昇圧コンバータとを備える装置において、装置の故障を検出すると共に故障箇所をより正確に特定する。
【解決手段】モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリへの過電流を検出した場合(S100,110)、所定期間に亘ってモータMG1,MG2の各相電流を入力しその絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し(S120〜150)、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相電流が一致しないモータを駆動するインバータのオープン故障と判定し(S160〜180)、各相の最大相電流が一致しないモータがないときには昇圧コンバータ30の故障と判定する(S190)。
(もっと読む)
ハイブリッド自動車
【課題】二次電池の蓄電割合が大きく低下するのを抑制する。
【解決手段】補機90の消費電力が小さいほど大きくなる傾向に始動用閾値Pstartおよび停止用閾値Pstopを設定し、エンジン22から動力を出力しながら走行するときには、補機90の消費電力が小さいほど車両に要求される車両要求パワーPv*に比して大きくなる傾向にエンジン22から出力すべきエンジン要求パワーを設定し、設定したエンジン要求パワーがエンジン22から出力されると共に走行に要求される要求トルクによって走行するようエンジン22とモータMG1,MG2とを制御する。
(もっと読む)
ハイブリッド自動車
【課題】電動機の駆動回路などの電圧を適正に保持して装置の保護を図ると共に動力性能を発揮させる。
【解決手段】モータMG1によりエンジンをクランキングする際には、モータMG2の回転数Nm2が昇圧回路にLC共振を生じさせる閾値Nref以下のときには、昇圧上限値Vlimに低電圧Vloを設定し(S590)、モータMG2の回転数Nm2が閾値Nrefよりも大きいときには、昇圧上限値Vlimに高電圧Vhiを設定し(S600)、インバータ必要電圧Vinv*と昇圧上限値Vlimとのうち小さい方を昇圧回路の電圧指令VH*に設定する(S610)。これにより、エンジン22のクランキング中に昇圧回路のLC共振によって高電圧系のコンデンサに大きな電圧変動が生じるものとしても、耐圧を超える過大な電圧が作用するのを抑制することができると共に電圧の過剰な制限を抑制して走行性能を発揮させることができる。
(もっと読む)
ハイブリッド自動車
【課題】内燃機関によって駆動されて電動機を含む冷却対象に冷却液体を供給する機械式オイルポンプを備えるものにおいて、電動機の過度の温度上昇を抑制すると共に車両全体としてのエネルギ効率の低下を抑制する。
【解決手段】エンジンを間欠運転してよいときに値0が設定されると共にエンジンの運転停止を禁止すべきときに値1が設定される運転停止禁止フラグFが値0のときには(S310)、モータ温度Tmoが所定温度Tmoref以上に至ったときに運転停止禁止フラグFに値1を設定する(S330)。そして、設定した運転停止禁止フラグFが値0のときには、エンジンを間欠運転しながら走行するようエンジンと二つのモータを制御し、運転停止禁止フラグFが値1のときには、エンジンを継続して運転しながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
負荷駆動装置および車両
【課題】ドライバビリティの悪化を防止しつつ電費の悪化防止にも配慮した負荷駆動装置および車両を提供する。
【解決手段】ノイズフィルタ20は、インバータ10とモータジェネレータMGとの間の電路に配設される。ノイズフィルタ20は、バイパスコンデンサC1〜C3を含む。切替回路30は、スイッチ32,34,36を含み、電力線PU1,PV1,PW1をそれぞれ電力線PU3,PV3,PW3に電気的に接続することによって、インバータ10とモータジェネレータMGとの間の電路からノイズフィルタ20を電気的に切離すことができる。MG−ECU40は、モータジェネレータMGの作動状態に基づいて切替回路30を制御する。
(もっと読む)
鞍乗り型車両
【課題】ハンドルバーに荷重センサを設けることなしに、ユーザの押し歩きを判定してモータの駆動力によるアシストが可能な鞍乗り型車両を提供する。
【解決手段】駆動源であるモータと、スロットルグリップと、該スロットルグリップへの利用者の操作入力に基づきモータの駆動制御を行うECU14とを備え、利用者の押し歩きをモータによりアシスト可能な鞍乗り型車両において、ECU14は、スロットルグリップへの操作入力が検知された時にモータを所定時間だけ駆動させる初期駆動制御手段30と、所定時間経過後の電流値が、予め設定された電流値の閾値よりも低いか否かを判定し、前記電流値が閾値よりも低いと判定された場合に、利用者の押し歩きを検知する押し歩き検知手段31と、押し歩き検知手段31により利用者による押し歩きが検知された場合に、前記所定時間を経過した後もモータの駆動を継続させるアシスト継続制御手段32とを備える。
(もっと読む)
充電制御方法、充電制御装置およびバッテリー充電システム
【課題】異常に起因する充電不足等が発生するリスクを低減する他、充電再開から完了迄の時間をより短縮可能な充電制御方法、充電制御装置およびバッテリー充電システムの提供。
【解決手段】充電器から電動車のバッテリーユニットへの充電に係る充電制御方法であって、充電器からバッテリーユニットへの出力が有る状態(S1)で異常が発生した際、充電器からの出力が無い状態(S2)へ一旦遷移させた後、待機状態(S3)へと遷移させ、所定時間以内に異常が復帰した際には、待機状態(S3)より充電器からの出力が有る状態(S1)へと遷移させ、異常が復帰した時点から充電を再開させる一方、異常が復帰しない状態で所定時間が経過した後は、待機状態(S3)より充電停止状態(S4)へと遷移させる充電制御方法、並びにこれを適用した充電制御装置およびバッテリー充電システムとする。
(もっと読む)
61 - 80 / 1,610
[ Back to top ]