
Fターム[5H115TO12]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 電気的変量検出 (4,425) | 電流 (1,610)
Fターム[5H115TO12]に分類される特許
81 - 100 / 1,610
ハイブリッド自動車
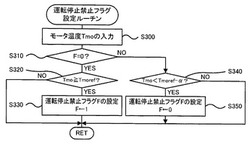
【課題】内燃機関によって駆動されて電動機を含む冷却対象に冷却液体を供給する機械式オイルポンプを備えるものにおいて、電動機の過度の温度上昇を抑制すると共に車両全体としてのエネルギ効率の低下を抑制する。
【解決手段】エンジンを間欠運転してよいときに値0が設定されると共にエンジンの運転停止を禁止すべきときに値1が設定される運転停止禁止フラグFが値0のときには(S310)、モータ温度Tmoが所定温度Tmoref以上に至ったときに運転停止禁止フラグFに値1を設定する(S330)。そして、設定した運転停止禁止フラグFが値0のときには、エンジンを間欠運転しながら走行するようエンジンと二つのモータを制御し、運転停止禁止フラグFが値1のときには、エンジンを継続して運転しながら走行するようエンジンと二つのモータとを制御する。
(もっと読む)
負荷駆動装置および車両

【課題】ドライバビリティの悪化を防止しつつ電費の悪化防止にも配慮した負荷駆動装置および車両を提供する。
【解決手段】ノイズフィルタ20は、インバータ10とモータジェネレータMGとの間の電路に配設される。ノイズフィルタ20は、バイパスコンデンサC1〜C3を含む。切替回路30は、スイッチ32,34,36を含み、電力線PU1,PV1,PW1をそれぞれ電力線PU3,PV3,PW3に電気的に接続することによって、インバータ10とモータジェネレータMGとの間の電路からノイズフィルタ20を電気的に切離すことができる。MG−ECU40は、モータジェネレータMGの作動状態に基づいて切替回路30を制御する。
(もっと読む)
鞍乗り型車両
【課題】ハンドルバーに荷重センサを設けることなしに、ユーザの押し歩きを判定してモータの駆動力によるアシストが可能な鞍乗り型車両を提供する。
【解決手段】駆動源であるモータと、スロットルグリップと、該スロットルグリップへの利用者の操作入力に基づきモータの駆動制御を行うECU14とを備え、利用者の押し歩きをモータによりアシスト可能な鞍乗り型車両において、ECU14は、スロットルグリップへの操作入力が検知された時にモータを所定時間だけ駆動させる初期駆動制御手段30と、所定時間経過後の電流値が、予め設定された電流値の閾値よりも低いか否かを判定し、前記電流値が閾値よりも低いと判定された場合に、利用者の押し歩きを検知する押し歩き検知手段31と、押し歩き検知手段31により利用者による押し歩きが検知された場合に、前記所定時間を経過した後もモータの駆動を継続させるアシスト継続制御手段32とを備える。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、バッテリ電圧をコンバータ35で必要に応じて昇圧してインバータ38に供給し、交流モータ14の運転条件に応じて、インバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置を備える。制御装置は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中で且つインバータ入力電圧であるシステム電圧VHが所定閾値Vthrよりも小さいときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部とを含む。
(もっと読む)
ハイブリッド自動車
【課題】バッテリの蓄電割合SOCに拘わらず、モータからのトルクにより遊星歯車機構の歯打ちの発生を抑制させる。
【解決手段】停車時にエンジンを運転させる際には、バッテリの蓄電割合SOCが閾値SOChi未満のときには(S180)、モータMG1から負トルク−Tsetを出力すると共にエンジンがアイドリング回転数Nidleで回転するようエンジンとモータMG1とを駆動制御し(S190〜S210)、バッテリの蓄電割合SOCが閾値SOChi以上のときにはモータMG1から正トルクTsetを出力すると共にエンジンがアイドリング回転数Nidleで回転するようエンジンとモータMG1とを駆動制御する(S220〜S240)。
(もっと読む)
電動車両のモータ制御装置
【課題】要求トルクを確保しつつモータの発熱をより効果的に抑制する上で有利な電気自動車のモータ制御装置を提供する。
【解決手段】第1の駆動制御手段50Aは、フロントモータ18およびリアモータ20から出力される駆動トルクをそれぞれ第1、第2の駆動トルクとしたとき、運転者の走行用操作により要求される要求トルクをモータ18、20の全体としての効率が最大となるように第1、第2の駆動トルクに分配して各モータを駆動制御する。判定手段50Bは、第1、第2の駆動トルクの一方が基準トルクを超過した時間が所定時間以上であるか否かを判定する。第2の駆動制御手段50Cは、所定時間以上であると判定されたときに、所定時間T0以上であると判定されたモータの駆動トルクを基準トルクよりも減少させると共に、他方のモータの駆動トルクを増大させることにより要求トルクを満足させる。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
モータ駆動制御システムの制御装置およびそれを搭載する車両
【課題】モータ駆動制御システムにおいて、矩形波制御からPWM制御への切換えの際に、制御モードの切換え遅れに起因して発生する電流乱れを抑制する。
【解決手段】モータ駆動制御システム100を制御するECU300は、矩形波制御モードおよびPWM制御モードのいずれかによってインバータ140を制御して交流電動機200を駆動する。ECU300は、制御モード選択部330と、交流電動機200のモータ電流をA/D変換するA/D変換部340とを備える。A/D変換部340は、矩形波制御モードの場合に、交流電動機200の回転速度が急激に低下したときは、交流電動機200の電気角に基づく実行周期よりも速い実行周期に従って動作する。制御モード選択部330は、矩形波制御モードの場合に、モータ電流の電流乱れが発生したことに応じて、矩形波制御モードからPWM制御モードへ切換える。
(もっと読む)
車両用組電池及び車両
【課題】車両用電池の使用時における出力を維持しつつ、電解液の分解を抑制する装置を提供することを目的とする。
【解決手段】単電池2を複数積層した電池群3と、電池群3を単電池2の積層方向の両側から挟み込んで拘束するエンドプレート4と、エンドプレート4による拘束力を調整する拘束力調整部10と、拘束力調整部10を制御するコントローラ100と、を有し、コントローラ100は、拘束力調整部10を制御することにより、車両のイグニッションスイッチがオンであるとき、第1の拘束力により電池群3を拘束し、前記イグニッションスイッチがオフであるとき、前記第1の拘束力よりも低い第2の拘束力により電池群3を拘束することを特徴とする車両用組電池。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の自動走行制御時において、エンジンの駆動力による発電時の発電量の急激な変動によって発生する速度変動を抑えることを可能とする。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行状態を、ステアリングスイッチで設定された目標走行状態で維持するように自動調整する制御であるオートクルーズ制御を行っているときに、モータジェネレータ2による発電においてエンジン1に要求する要求エンジン発電トルクの変化率の上限値を、通常走行制御時の上限値よりも小さい値に制限する制御を行う。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間のトルク伝達を断接する摩擦係合要素における目標伝達トルク容量の補正精度を向上することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ(モータジェネレータ)2と駆動輪(タイヤ)7,7の間に介装され、モータ2と駆動輪7,7との間のトルク伝達を断接する摩擦係合要素(第2クラッチ)5における目標指令値(目標伝達トルク容量)を設定する際、補正量演算手段(補正量演算部)401Bにより、目標指令値の補正量を、摩擦係合要素5への入力トルク(推定モータトルク)が増大するほど大きな値に設定する。
(もっと読む)
電動車両の制御装置
【課題】バッテリの電力制限値を設定するに際し、バッテリ状態にかかわらずバッテリ保護機能と運転性向上の両立を図る。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータと、電力制限値制御手段と、を備える。モータジェネレータは、駆動源に設けられ、バッテリからの電力により駆動する。電力制限値制御手段は、バッテリの電力入出力の制限値である電力制限値を、短時間で終わる走行シーンで用いる瞬時用電力制限値と、長時間続く可能性のある走行シーンで用いる連続用電力制限値と、に分け、かつ、瞬時用電力制限値による制限幅を連続用電力制限値による制限幅よりも拡大するように設定する。
(もっと読む)
ハイブリッド車両の始動制御装置
【課題】極低温時等のバッテリの内部抵抗が大きい状態でも、バッテリの消費電力量を少なくして、エンジンの始動ができるハイブリッド車両の始動制御装置を提供すること。
【解決手段】統合コントローラ20は、バッテリ温度センサ18で検出される温度が設定値よりも低い状態で前記エンジン1を始動制御する際に、エンジン回転センサ10がエンジン1の稼働を検出するまではモータジェネレータ2を低回転数で作動制御し、エンジン回転センサ10が前記エンジン1の稼働を検出した後はモータジェネレータ2を高回転数で作動制御するようになっている。
(もっと読む)
充電システムの制御装置およびそれを搭載する車両、ならびに充電システムの制御方法
【課題】パイロット信号に基づいて外部充電を行なう車両の充電システムにおいて、充電処理終了後にパイロット信号の発振が継続された場合に、充電制御の再開と停止とを繰り返すような不具合を解消する。
【解決手段】充電ケーブル300を介して外部電源402からの電力を用いて充電が可能な車両10における充電システムの車両ECU170は、充電動作を実行する充電制御部508と、パイロット信号CPLTに応答して充電制御部508を起動するための起動制御部507とを備える。充電制御部508は、充電動作の終了時の終了要因に基づいて、次回の充電動作の禁止または許可を決定する。
(もっと読む)
電気車制御装置
【課題】 演算の精度を向上し、ブレーキチョッパ装置を有効に利用することができる電気車制御装置を提供することである。
【解決手段】 1つの実施形態の電気車制御装置は、コンバータ5、インバータ6と、コンバータ5とインバータ6の間に接続され、電動機の回生エネルギーを消費するためのブレーキチョッパ抵抗器9と、ブレーキチョッパ抵抗器9に流れる電流を制御するブレーキチョッパ装置8と、交流電源の電圧を検出する電圧検出器3と、交流電源の電流を検出する電流検出器4と、電圧検出器3より検出される電圧をもとに演算する第1通流率と電流検出器4より検出される電流をもとに演算する第2通流率を比較し、第1通流率と第2通流率の値の小さいほうをブレーキチョッパ装置がブレーキチョッパ抵抗器を制御するための制御値として使用する制御部10を有している。
(もっと読む)
鉄道車両用蓄電池制御システム
【課題】蓄電池の電池容量の検出精度を向上する。
【解決手段】充放電可能な蓄電池と、電力変換器を有する鉄道車両用の蓄電池制御システムにおいて、力行運転中の蓄電池からの放電量、あるいは制動運転中の蓄電池への充電量に基づいて、充放電される電荷量を演算し、非充放電期間である、惰行運転期間あるいは停車期間において、所定の緩和時間経過後に、蓄電池の端子開放電圧を求める。そして、充放電される電荷量と蓄電池の充放電前後の充電率の変化とに基づいて、電池の容量を演算することにより、電池容量を演算する機会を増やすとともに、その精度を改善する。
(もっと読む)
電力変換装置
【課題】過変調制御が行われる場合において、信号伝達経路等の異常診断頻度の低下を回避するためのスイッチング素子の操作信号を適切に生成することのできる電力変換装置を提供する。
【解決手段】第2セレクタSL2から出力されるスイッチング素子Sjkの操作信号gjkの立ち下がりを入力とし、駆動回路DUから出力される駆動信号djkの変化に基づき、第2セレクタSL2からスイッチング素子Sjkまでの信号伝達経路に異常が生じていないか否かを診断する構成において、過変調制御又は矩形波制御によってモータジェネレータの制御が行われる場合、第2セレクタSLから操作信号gjkとしてオン操作信号が出力される期間に、出力されるオン操作信号をオフ操作信号に強制的に変更する。
(もっと読む)
車載ナビゲーション装置
【課題】充電池による電動車両の走行可能距離をより精度良く算出することのできる車載ナビゲーション装置を提供する。
【解決手段】車載ナビゲーション装置1では、制御部20は、現在地天気情報、目的地天気情報、設定温度情報、及び現在地外気温情報を用いて、車載空調機の経路上における駆動状況の変化を予測し、その予測結果に基づいて走行可能距離Lを補正するとともに、電動車両の現在地を中心とし、その補正された走行可能距離Lを半径とした円を道路データに重ねて表示部16に表示する。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】車輪のスリップを抑制して芝の損傷を防止することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、前輪11a,11bを回転させる駆動力を発生するモータ41を備える車両であって、モータの回転数を検出するモータ回転数センサQ1と、モータ41に流れる電流の電流値を検出するモータ電流センサQ2と、モータ回転数センサQ1及びモータ電流センサQ2の少なくとも一方の検出結果に基づいて前輪11a,11bがスリップ状態であるか否かを判定するスリップ状態判定部38aと、前輪11a,11bがスリップ状態であるとスリップ状態判定部38aで判定された場合にモータ41のトルクを減ずる制御を行うモータ制御部38cとを備える。
(もっと読む)
電動乗用車両
【課題】道路の状況に応じて軽快に走行できる上に、発進時に急発進することを防止して運転者の安全を確保することのできる電動乗用車両を提供する。
【解決手段】前輪2又は後輪3の何れか一方が一輪で構成されるとともに、前輪又は後輪の何れか他方が一輪以上で構成され、前輪及び後輪のそれぞれが別個独立の電動モータM1、M2で駆動するように構成された乗用電動乗用車両において、前輪及び後輪の駆動を制御する制御手段13を備え、制御手段13は、現実の走行に必要な電動モータの出力トルクが予め設定された基準トルク値以下の状態で前輪又は後輪の何れか一方の電動モータを駆動し、現実の走行に必要な電動モータの出力トルクが基準トルク値よりも大きい状態で前輪及び後輪の電動モータを駆動するように構成されている。
(もっと読む)
81 - 100 / 1,610
[ Back to top ]