
Fターム[5H505LL01]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620)
Fターム[5H505LL01]の下位に属するFターム
アナログ値で検出するもの (110)
デジタル値で検出するもの (278)
速度検出器を用いないで速度を検出するもの (581)
検出器を複数台設けるもの
Fターム[5H505LL01]に分類される特許
21 - 40 / 651
電動パワーステアリング装置
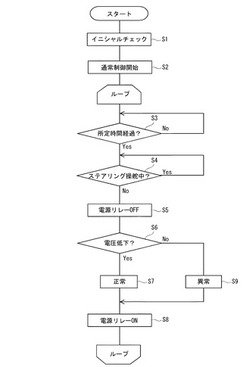
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
油圧ユニット

【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御可能な制御部(1)を設ける。
(もっと読む)
油圧ユニット
【課題】油圧ユニットに誘導モータを用いた場合であっても、油圧ユニットの運転効率及び運転応答性の両方が低下しないようにする。
【解決手段】油圧ユニット(10)に、誘導モータ(12)の回転速度に応じて効率優先動作と応答優先動作とを切り換えながら誘導モータ(12)をインバータ(13)を介してベクトル制御で制御する制御部(1)を設ける。
(もっと読む)
モータ制御装置
【課題】モータに矩形波電圧を印加するモータ制御装置において、過電流の発生を抑制する。
【解決手段】モータに印加する電圧の位相を変化させてトルクを調整するとともに、モータに印加する電圧波形を矩形波形とPWM波形の間で切り替えてモータを制御するモータ制御装置であって、モータの回転数に応じて電圧位相の下限値を規定する下限値曲線a,c,eを含むマップを備え、モータの回転数Nに応じた電圧位相φvが所定の下限値曲線a,c,e以下となった場合に、モータに印加する電圧波形を矩形波形からPWM波形に切り替える。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】モータを駆動するインバータのスイッチングモードを決定するための演算処理負荷を大幅に低減すること。
【解決手段】αβ座標系において、インバータ12の6つの非ゼロベクトルスイッチングモードV1〜V6により印加される電圧に応じて、それぞれモータ10に流れる電流のベクトルIvec1〜Ivec6が、ゼロベクトル電流Iα0、Iβ0に対して固定した方向に定められる。その点に着目し、それら電流ベクトルIvec1〜Ivec6の中から、指令電流値Iα*、Iβ*に最も近い電流ベクトルIveckを特定する。そして、特定した電流ベクトルIveckに応じた非ゼロベクトルスイッチングモードVkにてインバータ12を動作させた場合の、非ゼロベクトル電流Idk、Iqkのみを演算するようにした。このため、演算処理負荷を大幅に低減することが可能となる。
(もっと読む)
モータ制御装置
【課題】 バッテリーを1台のみ備えるHEVやEVで、車両走行中であっても、このバッテリーを構成する二次電池のSOCを正確に求めるための二次電池の端子間電圧測定のために、このバッテリーの定電流駆動を行う方法を提供する。
【解決手段】
本発明はモータ制御装置であって、モータの負荷変動により二次電池の充放電電流が変化する第一のモードと、モータの負荷変動に拘わらず、二次電池の充放電電流が所定時間は一定になる第二のモードとのいずれかのモードを設定するモード設定手段と、モード設定手段により設定されたモードと、トルク指令値と、モータ回転数とに基づいて、モータを駆動する駆動信号を生成する駆動信号生成手段とを備える。
(もっと読む)
電動圧縮機制御システム
【課題】空調性能の悪化を最低限に抑え、簡便な方法で電動圧縮機9の回転数制御を実施することで、性能スペックの低い安価な電子回路を使用した圧縮機電子ユニット1内で電動圧縮機9の消費電力制限機能を実現する。
【解決手段】車両空調装置の冷媒を吐出する電動圧縮機9を電池3の電力を用いて駆動するシステムにおいて、電動圧縮機9は、該電動圧縮機9と一体に電動機10の回転数を制御する圧縮機電子ユニット1を有し、車両用空調装置が要求する回転数指令と、電池3の電池電力残量から演算された電力上限値とを上位電子ユニット2から圧縮機電子ユニット1に導く多重通信線8aを有し、圧縮機電子ユニット1内で回転数指令と電力上限値と電動機10が消費する実消費電力とから目標回転数を演算する電力制限制御を実行し、該演算された目標回転数に応じて電動機10の回転数制御を行う。
(もっと読む)
車両および車両の制御方法
【課題】インバータによりモータジェネレータを駆動して走行が可能な車両において、インバータに含まれるスイッチング素子に短絡故障が生じた場合の車両搬送時に、車両内の機器の二次故障を抑制しつつ車両の移動を可能とする。
【解決手段】車両100は、モータジェネレータ140と、インバータ130と、ECU300とを備える。インバータ130は、各々が上下アームを構成する2つのスイッチング素子を有する三相の駆動アーム131,132,133を含み、蓄電装置110からの直流電力を交流電力に変換してモータジェネレータ140を駆動する。ECU300は、車両100がモータジェネレータ140からの駆動力で自走していない場合に、インバータ130に一相短絡故障が生じたときには、車速に応じてインバータ130のスイッチング状態を変更する。
(もっと読む)
モータ制御装置
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を用いる場合、スイッチングモードの更新可能タイミングの都度、スイッチングモードを最適なものに変更することが可能であることから、スイッチングモードの切り替え頻度が高くなるおそれがあること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じて、モータジェネレータ10を流れる電流と指令電流id*,iq*との差ベクトルのノルムが閾値rとなるまでの所要時間Tsを予測する。モード決定部34では、所要時間Tsが最も長いものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、回転電機の回転数の急変時に、制御切替を迅速に行うことで、回転電機に過電流が流れることを有効に抑制することである。
【解決手段】回転電機制御システム10は、回転電機(第2モータジェネレータ)14と、回転電機14の所定時間当たりの回転数を測定する回転数センサ34と、制御部32とを含む。制御部32は、回転数の測定結果に応じて、回転電機14の制御方法の切り替えの際に用いる制御切替閾値である制御切替位相を変更する閾値変更部48を有する。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流が大きくなることで、モデル予測制御の制御性が低下すること。
【解決手段】予測部33では、モード設定部31によって仮設定されたスイッチングモードのそれぞれに応じた予測電流ide,iqeを算出する。モード決定部34では、予測電流ide,iqeと指令電流id*,iq*との乖離が小さいものを最終的なスイッチングモードに決定する。操作部28では、インバータINVのスイッチングモードをモード決定部34の決定に従わせる。ここで、予測部33は、予測電流ide,iqeの予測に用いる電圧方程式における電流の時間微分の係数として、過渡インダクタンスLdt,Lqtを用いる。それらは、電流と電気角速度ωとの積の係数としての定常インダクタンスLds,Lqsとは相違する。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
駆動制御装置、電気機器及び駆動制御方法
【課題】負荷特性に応じて電機機器の回転数を制御することができる駆動制御装置、電気機器及び駆動制御方法を提供する。
【解決手段】モータ20の出力に関する物理量を検出する物理量検出部71、モータ20の回転数が基底回転数以上であるか否かを判定する回転数判定部72、回転数判定部72での判定結果に応じて物理量に対する閾値を選択する閾値選択部73、検出した物理量及び選択した閾値の大小関係に応じて回転軸の回転数を制御する回転数制御部74などを備える。
(もっと読む)
交流電動機の駆動装置およびそれを搭載する車両、ならびに交流電動機の制御方法
【課題】変調PWM制御および正弦波PWM制御を切換えて制御する交流電動機の駆動装置において、交流電動機の回転速度が急変した場合の緊急切換動作時におけるトルク急減を抑制する。
【解決手段】車両100は、ECU300によってPWM制御を用いてインバータ130が制御されてモータジェネレータ140を駆動することによって走行する。ECU300は、正弦波PWM制御および過変調PWM制御を含む複数の制御モードを切換えてインバータ140を制御する。ECU300は、過変調PWM制御を実行中に、駆動輪160がスリップ状態からグリップ状態に変化することに伴って電流が急増した場合に、過変調PWM制御から正弦波PWM制御に強制的に切換えるとともに、正弦波PWM制御における変調率の上限値を緩和して、正弦波PWM制御において通常時よりも大きなトルクが出力できるようにする。
(もっと読む)
交流電動機の速度制御装置
【課題】磁束軸電流の過補償を抑制する。
【解決手段】交流電動機の速度制御装置は、トルク軸電流を比例積分制御するトルク軸電流制御器から出力されるトルク軸電圧成分を所定の値以下になるように制限するトルク軸電圧リミッタと、前記トルク軸電流制御器から出力されるトルク軸電圧成分と前記トルク軸電圧リミッタから出力されるトルク軸電圧指令とからトルク軸電圧飽和量を求める第1の減算器と、前記求められたトルク軸電圧飽和量を、推定器により推定されたトルク軸過渡電圧飽和量で補正する補正部と、前記補正されたトルク軸電圧飽和量を保持する第1の積分器と、前記保持されたトルク軸電圧飽和量と直交2軸座標の回転角速度とから磁束軸電流指令修正量を求めて出力する磁束軸電流指令修正器と、磁束軸電流指令から前記磁束軸電流指令修正量を減算し磁束軸電流指令修正指令を求めて出力する第2の減算器とを備えている。
(もっと読む)
モータ制御装置及びモータ駆動システム、並びにモータ制御方法
【課題】モータの制御を不安定にすることなく、モータを駆動するための電力に重畳する基本波成分を除去する、ことを目的とする。
【解決手段】モータ制御装置2は、3相/2相変換部12によって、電流センサ7によって検出された3相交流測定電流を2相交流測定電流へ変換し、2相測定交流電流に重畳する基本波成分を含む周波数帯域を阻止帯域とし、交流モータ4の回転数に基づいて該阻止帯域が変化するノッチフィルタを有する可変ノッチフィルタ部13によって、該阻止帯域の周波数成分を減衰させる。そして、モータ制御装置2は、電流PI制御部14、及び極座標/3相変換部15によって、交流モータ4を駆動させる3相交流電力指令値を、可変ノッチフィルタ部13から出力された2相交流測定電流と電流指令値に基づいて生成する。
(もっと読む)
インバータ制御装置
【課題】コアレス電流センサを用いた際の検出精度の悪化の影響を無くしてモータを正常に駆動させることが可能なインバータ制御装置を提供する。
【解決手段】コアレス電流センサ40が備えるシールド板により生じる残留磁束の影響により出力電圧Vuv、Vvwに含まれる位相遅れ及びゲイン誤差が無くなるように、出力電圧Vuv、Vvwを補正し、その補正された補正出力電圧Vuv、Vvwと、外部から入力される指令値とに基づいて、モータインバータ41を制御する。
(もっと読む)
21 - 40 / 651
[ Back to top ]