
Fターム[5H505LL01]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620)
Fターム[5H505LL01]の下位に属するFターム
アナログ値で検出するもの (110)
デジタル値で検出するもの (278)
速度検出器を用いないで速度を検出するもの (581)
検出器を複数台設けるもの
Fターム[5H505LL01]に分類される特許
41 - 60 / 651
インバータ制御装置
【課題】コアレス電流センサを用いた際の検出精度の悪化の影響を無くしてモータを正常に駆動させることが可能なインバータ制御装置を提供する。
【解決手段】コアレス電流センサ40が備えるシールド板により生じる残留磁束の影響により出力電圧Vuv、Vvwに含まれる位相遅れ及びゲイン誤差が無くなるように、出力電圧Vuv、Vvwを補正し、その補正された補正出力電圧Vuv、Vvwと、外部から入力される指令値とに基づいて、モータインバータ41を制御する。
(もっと読む)
回転電機の駆動システム

【課題】平滑コンデンサの放電を、より迅速に行なえる回転電機の駆動システムを提供する。
【解決手段】MG駆動用コンピュータ18は、衝突または衝突の可能性が検知された場合、システムリレーSR1,SR2をオフする。また、回転電機10の回転数を低減する回転数低減制御と、平滑コンデンサ14を放電する放電制御とを実行する。回転数低減制御においては、回転電機10の回転数が第二閾値以下の場合には、インバータ12の上アームまたは下アームの三相分のスイッチング素子をオンにし、他をオフにする三相オン制御を行なう。回転数が第二閾値超過の場合は、上アームまたは下アームの一相分のスイッチング素子をオンにし、他をオフにする一相オン制御を行なう。
(もっと読む)
電動船外機
【課題】電動船外機の操作性の向上を図るとともに船舶のスペースを圧迫しない電動船外機を提供する。
【解決手段】直流電流を交流電流に変換するインバータ3およびインバータ3が変換した交流電流によって駆動する駆動用電動機2を有する船外機本体11と、インバータ3に直流電流を供給する電池部122および船外機1を制御する制御部121を有し船外機本体11とは別体に構成される制御/電源ユニット12と、電池部122とインバータ3とを直流電流を供給可能に接続する第一主電力線711および船外機本体11と制御部121とを信号を送受信可能に接続する第一信号線715と含む接続ケーブル710とを備え、インバータ3が変換した交流電流を駆動用電動機2に供給するための第二主電力線712が船外機本体11の後側に配策され、第一信号線715が船外機本体11の前側に配策される。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
多相電動機駆動装置
【課題】キャリア同期方式のメリットを生かし、直流電源の電圧と電流の振動を抑制する。
【解決手段】4以上の整数M個の巻線且つ4以上の整数N相の巻線を有し、各巻線相互間は電気的に絶縁され、かつ磁気的に結合された多相電動機1と、各巻線にそれぞれ接続され、直流電力を交流電力に変換する4以上の整数N台の単相パルス幅変調方式のインバータ回路11と、各11の内、第1と第2のインバータの間に対してキャリアの位相を位相角だけシフト、第2と第3のインバータの間に対してキャリアの位相を位相角だけシフトさせるという方法を繰り返すことにより、各11の線間電圧のオンするタイミングが分散するように各制御回路のキャリアの位相をシフトさせる位相補正回路とを備え、巻線数Mが相数N、インバータの台数Nの整数倍となるように構成し、各11の出力に1の巻線数M/Nだけ並列接続した多相電動機駆動装置。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
モータ制御装置およびそれを用いた電動パワーステアリング装置
【課題】複数相のモータを制御するモータ制御装置において、対象とする相に開放状態の故障が発生した場合に、いずれの相に開放状態の故障が発生したか否かを、迅速かつ正確に検知するモータ制御装置およびそれを用いた電動パワーステアリング装置を得る。
【解決手段】電源電圧Vbが所定電圧Vthr以上、かつ、モータ回転速度ωが所定速度ωthr以下、かつ、対象とするx相電圧指令Vx*がゼロ付近でなく、かつ、対象とするx相の電流Ixが所定電流Iu_thr以下、かつ、制御誤差が所定誤差以上である状態が所定時間以上検出された場合に、対象とするx相に開放状態の故障が発生したと判定する。
(もっと読む)
同期電動機の駆動装置
【課題】同期電動機の力率及びトルクを簡便な方法で高精度に制御することができる同期電動機の駆動装置を提供する。
【解決手段】同期電動機の実速度と速度基準との偏差に基づいて、同期電動機のトルク基準を算出する速度制御手段と、同期電動機の電機子に流れる電流、同期電動機の界磁に流れる電流、電機子の反作用インダクタンスの算出値に基づいて、同期電動機の内部相差角を算出する磁束演算手段と、トルク基準と内部相差角とに基づいて、同期電動機の力率が1となるように、電機子の電流基準を算出する電流基準演算手段と、電機子に流れる電流と電機子の電流基準との偏差がなくなるように、同期電動機に流れる電流を制御する電流制御手段と、磁束演算手段が内部相差角を算出する際に利用する電機子の反作用インダクタンスの算出値を同期電動機の負荷状態に応じて変化させるパラメータ演算手段と、を備えた。
(もっと読む)
回転電機制御装置
【課題】インバータを備えた回転電機駆動装置と直流電源部との接続が遮断された場合に、回転電機からインバータを介して回生される回生電力を迅速に低減させる。
【解決手段】回転電機の回転に同期して回転する2軸の直交ベクトル空間において、各軸に沿った界磁電流と駆動電流との合成ベクトルである電機子電流を制御してインバータを制御するインバータ制御部を備える。インバータ制御部は、直流電源部とインバータとの接続が遮断状態であると判定した場合には、回転電機の回生トルクがゼロとなるようにインバータを制御するゼロトルク制御を実行すると共に、遮断状態でのゼロトルク制御の実行に際して、回転電機の回生トルクをゼロに低下させていく際のトルク変化率ΔTの制限値を、直流電源部とインバータとの接続が維持されている状態でのトルク変化率ΔTの制限値LT1よりも大きい値に設定する。
(もっと読む)
電力変換装置及び電力変換システム
【課題】更なる信頼性向上を図れる電力変換装置及び電力変換システムを提供すること。
【解決手段】上記課題を解決するために、例えば、インバータ回路は、前記モータ制御回路からのPWM信号に基づき前記インバータ回路を構成する半導体スイッチング素子を駆動するゲートドライブ回路とサージ電圧検出信号を検出するサージ電圧検出回路を備え、サージ電圧検出回路により検出されたサージ電圧検出信号はモータ制御回路に入力され、サージ電圧検出信号を検出した際に前記電流指令生成部からの電流指令値と所定の電流指令値と対比することによりサージ電圧を抑制するサージ電圧抑制手段の実施の可否を選択するような手段を設けるようにすればよい。
(もっと読む)
駆動装置および電動車両
【課題】パルス幅変調制御によるインバータの制御から矩形波制御によるインバータの制御への切替時にインバータの制御性が低下するのを抑制する。
【解決手段】インバータをPWM制御によって制御するか矩形波制御によって制御するかに拘わらず、電圧位相指令θs*の今回値と前回値との差分としての電圧位相指令変化量Δθsが変化許容値θslim以下となるよう電圧位相指令θ*を設定し(S330〜S430)、設定した電圧位相指令θs*を用いて次の切替電気角θswやスイッチングパターンを設定する(S440,S450)。
(もっと読む)
電動機駆動装置
【課題】リアクトル電流を検出してコンバータの制御に用いるものにおいて、リアクトル電流を精度をより向上させる。
【解決手段】昇圧コンバータが動作中で且つオフセット学習が完了しているときには(S100,S110)、バッテリの充放電電流IbからリアクトルLの電流ILを減じた電流差を補正量ΔILに設定し(S130)、リアクトルLの電流ILとオフセット学習量IL0と補正量ΔILとの和を昇圧コンバータ55の制御に用いるリアクトル電流ILとして設定する(S140)。これにより、リアクトル電流ILの精度をより向上させることができ、ひいては昇圧コンバータ55の制御性をより向上させることができる。
(もっと読む)
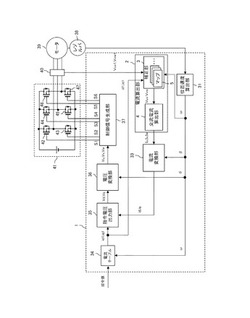
船舶用電気推進装置
【課題】蓄電池設備の容量(設置スペースおよび重量)を大きくせずに、船舶航行中の電池切れを防止するようにした電気推進装置を提供する。
【解決手段】陸上電源8から船舶内の蓄電池3を充電し、その電力によって推進用電動機2を駆動する船舶用電気推進装置において、船舶の目的地までの距離S1、速度の計画値v1、推進用電動機の消費電力計画値P1からなる第1群のデータまたは、GPS28、電力検出器32で実測された距離S2、速度v2、推進用電動機2の消費電力P2からなる第2群のデータのいずれかと蓄電池の電池残量A1とから、目的地まで到達可能な推進電動機の消費電力上限値を求め、電力上限値を推進用電動機2に印加された電圧で除算してトルク分電流上限値IqLIMを求め、推進力指示器によって設定される推進用電動機のトルク分電流指令値Iq*がトルク分電流上限値IqLIMを超えないように制限して推進用電動機2を駆動する。
(もっと読む)
回転機の制御装置
【課題】予測電流ide,iqeと指令電流idr,iqrとの差が所定範囲内となることで現在の操作状態を維持する場合、モータジェネレータ10の電流を急激に変化させる操作状態が採用されているおそれがあり、これにより所定範囲内に留まる期間が短くなること。
【解決手段】予測電流ide,iqeと指令電流idr,iqrとの差が閾値以下且つ規定値以上である相対速度評価領域内にある場合、予測電流ide,iqeの変化速度を小さくする操作状態への変更を検討する。これにより、規定値以下の領域に留まる時間を伸長させることができ、ひいては高調波電流を抑制しつつもスイッチング状態の切替頻度を低減することができる。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
エネルギー蓄積部を有するモータ制御装置
【課題】交流電力を直流電力に変換するコンバータ回路と、直流電力をモータの駆動のための交流電力に変換しまたはモータから回生される交流電力を直流電力に変換するインバータ回路と、直流電力を蓄積もしくは出力するエネルギー蓄積部と、を備えるモータ制御装置において、小型で低コストのモータ制御装置を実現する。
【解決手段】モータ制御装置1は、交流電力を直流電力に変換するコンバータ回路11と、コンバータ回路11の直流側に接続され、直流電力をモータ2の駆動のための交流電力に変換しまたはモータ2から回生される交流電力を直流電力に変換するインバータ回路12と、コンバータ回路11およびインバータ回路12の直流側に接続され、直流電力を蓄積もしくは出力するエネルギー蓄積部13と、モータ2の動作を指令するモータ動作指令に基づいて、エネルギー蓄積部13が蓄積もしくは出力すべき直流電力量を制御する制御部14と、を備える。
(もっと読む)
電動モータ制御装置
【課題】ロータの回転が不安定になることを抑制することのできる電動モータ制御装置を提供する。
【解決手段】電動モータ10と、制御装置20と、第1駆動系統30と、第2駆動系統50とを備える電動モータ装置1において、第1駆動系統30が有する第1界磁部Mgaと、第2駆動系統50が有する第2界磁部Mgbとの界磁温度差ΔTが基準温度差ΔTxを超えるときに、第1界磁部Mgaおよび第2界磁部Mgbの少なくとも一方に流れる電流を制御する。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
インバータ装置および電動機ドライブシステム
【課題】巻線切替による影響を低減すること。
【解決手段】インバータ装置が備える定出力制御器8は、交流電動機への電圧指令の値が、直流電圧に基づいて決定される出力可能な最大電圧に達する場合に、電圧指令の値および最大電圧に基づいてd軸電流指令補正値を算出して出力する。また、定出力制御器8は、巻線切替信号に基づいて決定される出力切替タイミング時に、トルク指令と直流電圧とによって決定される定出力モデルを用いてd軸電流指令補正値を生成して所定時間出力する。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
41 - 60 / 651
[ Back to top ]