
Fターム[5J062AA13]の内容
無線による位置決定 (18,435) | 目的 (3,479) | 位置以外の測定を行うもの (640) | 時刻 (298)
Fターム[5J062AA13]に分類される特許
61 - 80 / 298
衛星位置決めシステムの時間測定のための方法および装置
【課題】受信した信号レベルが非常に弱く衛星データメッセージを読むことが出来ない状況に適している、衛星位置決めシステムの時間測定のための方法を提供する。
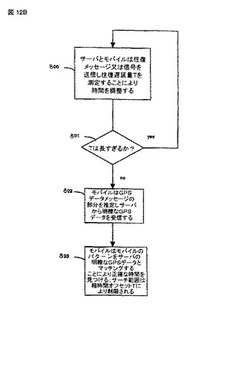
【解決手段】衛星データメッセージの少なくとも一部の第1のレコードは実体のあるもの、一般には基地局において受信される。第1のレコードは、衛星データメッセージの第2のレコードと比較される。第1のレコードと第2のレコードは、少なくとも部分的に時間が重畳される。この比較から時間が決定される。この時間は、第1のレコード(または第1のレコードが得られる源)が遠隔の実体のあるもの、一般にはモバイルSPS受信器において受信されたときを示す。これらの信号内のデータとして送信される衛星データメッセージを読むことなしにSPS信号を用いて日時を測定する。
(もっと読む)
少ない数のGPS衛星と同期および非同期基地局を使用して位置を決定する方法および装置

【課題】グローバル位置決定システム(GPS)衛星と、GPS時間に同期している基地局と、GPS時間に非同期の基地局とを使用している無線通信装置の位置を決定する方法および装置を提供する。
【解決手段】非同期基地局は互いに同期している。到着時間情報は、無線通信装置が基地局からの受信されたGPS時間情報が無線通信装置に通知する信号の受ける遅延である片道遅延によりバイアスされた情報を受信することを考慮して調整される。さらに、GPS時間に同期されていない基地局に対する到着時間差情報はこれらの基地局GPS時間間のバイアスが消去されることを可能にする。
(もっと読む)
タイミングオフセットを有する送信機を用いた位置特定
【課題】GPS技術に代わって(またはともに)ワイヤレスネットワーク中で位置または場所情報を決定するシステムおよび方法において、より正確に距離測定を行う。
【解決手段】タイミングオフセット情報が、複数の送信機と1つの受信機との間で通信される。このような情報によって、ネットワーク全体にわたったタイミング差に対処するように正確な位置または場所の決定を行うことができる。別の実施形態では、受信機における潜在的なタイミング差に対処するために、送信機からの送信を前進または遅延させる送信機位相調整を行う。さらに別の観点では、位置場所決定を容易にするために、タイミングオフセット通信および/または送信機位相調整の組み合わせをワイヤレスネットワークにおいて使用する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】後刻において、過去の希望時刻における位置算出を可能とする技術の提供。
【解決手段】デジタルカメラ3において、メジャメント取得部21は、GPS衛星からGPS衛星信号を受信することによってメジャメント情報を取得し、取得したメジャメント情報を取得時刻と対応付けて記憶部90に記憶させる第1処理を断続的に実行する。その一方で、処理部10は、センサー部30の検出結果を用いて移動ベクトルを算出し、算出した移動ベクトルを算出時刻と対応付けて記憶部90に記憶させる第2処理を継続的に実行する。そして、撮影時刻に最近接する取得時刻に取得されたメジャメント情報と、当該取得時刻から撮影時刻までの間に算出された移動ベクトルとを用いて、撮影時刻における位置を算出する。
(もっと読む)
時刻表示方法および時刻表示装置
【課題】建物の中など位置情報衛星からの電波が非常に弱い場合でも、位置時用法衛生を捕捉し、時刻に関する航法メッセージデータを受信して、正確な時刻を表示する高感度かつ低消費電力なGPS時計を実現する。
【解決手段】小刻みにC/Aコードを切換えながらサーチでの相関強度を累積し、相関強度記憶手段に記憶して直線抽出し、受信データも固定データとパターンデータとインクリメントデータ毎にレプリカを用意して、累積したデータとの相関をとる。
(もっと読む)
位置推定装置及び位置推定方法
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置推定装置300は、予め位置が特定されている複数の基地局201〜204と位置推定対象である複数の移動局101,102との一方向又は双方向通信により取得した所定の信号に基づき移動局の位置を推定する位置推定部340と、位置推定部340により推定された移動局の位置を用いて該位置を推定された移動局と前記複数の基地局との距離に含まれるバイアス量を推定するバイアス量推定部350と、位置推定部により推定された移動局の位置と、前記バイアス量分布取得部により取得されたバイアス量分布の該移動局の位置に対応するバイアス量から移動局の位置の推定のための初期値を求めるバイアス量推定部350と有する。位置推定部340は、バイアス量分布取得部370により取得されたバイアス量分布を移動局の位置の推定のために使用する。
(もっと読む)
信号捕捉方法、信号捕捉装置及び電子機器
【課題】航法メッセージデータのビット長よりも長い相関積算時間に亘る相関処理を可能にするための新たな手法を提供する。
【解決手段】第1乗算器211において、第1キャリア除去用信号発生部221より発生された第1キャリア除去用信号が受信信号に乗算されることで、受信信号が特定周波数の信号に変換される。また、第2乗算器212において、第2キャリア除去用信号発生部222より発生された第2キャリア除去用信号が受信信号に乗算されることで、受信信号が周波数ゼロの信号に変換される。そして、特定周波数の信号に対する相関演算が第1相関器231で行われて第1相関値が算出され、周波数ゼロの信号に対する相関演算が第2相関器232で行われて第2相関値が算出される。そして、第1相関値の積算結果及び第2相関値の積算結果が合算され、合算積算相関値を用いてGPS衛星信号が捕捉される。
(もっと読む)
被捜索物の位置特定方法及びシステム
【課題】被捜索物の位置を特定するための方法及びシステムを提供する。
【解決手段】携帯装置11内に組み込まれたサーチデバイスD1と被捜索物に付属されたターゲットデバイスD2を有し、サーチデバイスD1は互いに離間されたアンテナA1,A2が付属されたトランシーバ、方向を指示するための表示装置、当該トランシーバ及び表示装置を管理する電子装置を有し、ターゲットデバイスD2はアンテナA3と前記サーチデバイスから発信された信号の受信を検出し、その信号に応答できる電子装置が付属されたトランシーバを有し、サーチデバイスD1とターゲットデバイスD2間の信号はUWB信号であり、ターゲットデバイスD2は、ウェークアップ信号が、識別コードを包含する時にウェークアップ信号を受信するウェークアップ受信機を有する。
(もっと読む)
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
(もっと読む)
時刻同期装置およびその時刻同期補正方法
【課題】GPS衛星電波が受信出来ない時も正確に同期タイミング信号を出力する時刻同期装置およびその時刻同期補正方法を提供する。
【解決手段】内蔵発振器1は、GPS受信器Rからの1pps信号と出力するクロックと間の位相差信号を発振制御部3へ出力し、この位相差を無くす発振周波数制御信号が発振制御部3内蔵発振器1へ出力される。1pps信号が断となった場合、発振制御部3は、ログ部LGのドリフト記録部5と信号断時間記録部6から、予め測定記録していた単位時間あたりの内蔵発振器1の周波数のドリフト量と、断時間とからドリフトを補正する発振周波数制御信号を生成して内蔵発振器1へ出力し、タイミング信号発生部2は、内蔵発振器1からのクロックにより生成した同期タイミング信号を外部へ出力する。
(もっと読む)
衛星信号受信装置および衛星信号受信装置の制御方法
【課題】ソーラーセルを利用して屋内外を精度良く判断でき、受信処理を効率よく行うことができる衛星信号受信装置を提供すること。
【解決手段】ソーラーセル22と、二次電池24と、ソーラーセル22から二次電池24への充電経路を断続する充電制御スイッチ43と、充電制御スイッチ43が接続された状態で充電状態を検出する充電状態検出回路50と、充電制御スイッチ43が切断された状態で発電状態を検出する発電状態検出回路60と、制御回路40とを備える。制御回路40は、充電状態検出回路50を間欠的に作動し、ソーラーセル22から二次電池24に充電していることを検出した場合、発電状態検出回路60を間欠的に作動し、発電状態検出回路60で検出された検出値が予め設定された閾値以上の場合のみ、GPS受信回路30を作動する。
(もっと読む)
地名検索装置、地名検索方法、および電子機器
【課題】より簡易な方法で地名の検索が可能な地名検索装置を提供することを目的とする。
【解決手段】現在位置を取得する現在位置取得手段と、ランドマークの位置情報およびランドマークが存在する地名に関する情報である地名情報を関連付けてランドマーク情報として保持するランドマーク情報記憶手段と、ランドマーク情報記憶手段から、現在位置に基づいてランドマーク情報を抽出する抽出手段と、抽出手段にて抽出されたランドマーク情報の地名情報に基づいて、現在位置に対応する地名を特定する地名特定手段と、を備えた構成とした。
(もっと読む)
測位時間間隔制御装置及び測位時間間隔制御方法
【課題】移動状態及び/又は移動速度に応じて、測位すべき時間間隔及び位置を通知すべき時間間隔を変更すること。
【解決手段】位置を測定する時間間隔を制御する測位時間間隔制御装置は、移動端末装置の移動状態と、移動速度とを取得する取得部と、該取得部により取得された移動端末装置の移動状態と、移動速度とに基づいて、移動端末装置の位置を測定すべき時間間隔、及び該測定により得られた位置情報を出力すべき時間間隔を設定する測位時間間隔設定部とを有する。測位時間間隔設定部は、移動端末装置の移動状態及び/又は移動速度が変化した場合に、前記時間間隔を変更し、移動端末装置は、測位時間間隔設定部により設定された時間間隔で、移動端末装置の位置情報を取得し、該位置情報を出力する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】正確に補正された計時時刻によってGPS衛星の送信電波を速やかに捕捉することのできる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】計時を行う計時手段と、受信手段を介して測位衛星から時刻情報を間欠的に受信させる受信制御手段(S1)と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段(S14)と、受信された時刻情報と計時手段の計時時刻とに基づいて計時手段の単位時間当たりの誤差(“α/β”)を算出する誤差算出手段(S12,S13)と、算出された単位時間当たりの誤差(“α/β”)に基づき計時手段の計時時刻から誤差を除去した補正時刻を求める時刻補正手段(S4)と、補正時刻を使用して前記測位衛星の信号を捕捉するとともに当該捕捉した信号に基づき位置の測定を行う測位手段(S5〜S8)とを備える。
(もっと読む)
GPS受信機の時刻決定方法
【課題】 ホットスタート時におけるTTFFを短くする。
【解決手段】 RTCの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出する。続いて、算出した距離に基づいて、候補時刻に対する衛星からの送信時刻を算出し、送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出する。次に、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出す。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 任意のタイミングで測位処理を実行する場合でも、短時間に位置の測定を完了することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS衛星から送られてくる信号を受信する受信手段と、計時を行う計時手段と、受信されたエフェメリス情報を記憶する記憶手段と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段と、間欠的なタイミングTE1,TE2,TE3でエフェメリス情報を受信させる第1受信制御手段と、間欠的なタイミングTC1,TC2,TC3,TC4で時刻情報を受信させる第2受信制御手段とを備え、位置測定タイミングT1において計時手段の計時時刻に基づき同期をとりながらGPS衛星の送信信号を捕捉し、この送信信号と前記記憶手段に記憶されているエフェメリス情報とに基づいて位置の測定を行う。
(もっと読む)
電子機器、測位デバイス、情報処理方法およびプログラム
【課題】消費電力を削減するとともに適切な測位を行う。
【解決手段】使用要否判定部330は、ユーザによる操作入力に基づく処理が、測位部360により取得される測位情報を用いる特定処理であるか否かを判定する。この特定処理は、撮像部により生成された画像データに、測位部360により算出される位置情報を関連付けて記録する撮影モードである。動作制御部340は、使用要否判定部330による判定結果と、測位部360における動作内容に基づいて測位部360の動作停止制御を行う。例えば、操作入力に基づく処理が特定処理である場合には、測位部360に電源が供給される。また、操作入力に基づく処理が特定処理でなく測位部360がエフェメリスデータ取得を目的とする動作または衛星捕捉を目的とする動作を行っている場合には、その動作が終了するまでの間、測位部360が動作を継続できるよう制御を行う。
(もっと読む)
現在位置表示装置
【課題】GPS信号に基づく現在位置算出に要する時間だけ後の現在位置表示装置の推定位置を求め、この推定位置を現在位置として表示する。
【解決手段】現在位置表示装置1は、GPS衛星信号を受信し所定の演算時間後に現在位置表示装置1の位置をGPS測位位置として算出するGPS受信機11と、現在位置表示装置1の速度を検出する速度検出手段13と、GPS測位位置の履歴を記憶する測位位置記憶手段15と、前記速度検出手段13により検出された現在位置表示装置1の速度と、前記GPS測位位置とから、前記演算時間だけ後の現在位置表示装置1の位置を推定位置として算出する制御手段10と、前記推定位置に基づいて現在位置表示装置1の位置マークの表示位置を調整する表示制御手段19と、を備える。
(もっと読む)
タイム・ゾーンおよびDSTへの関与の決定
デバイスのためのローカル・タイム・ゾーン設定が、位置と日付および時刻とに基づいて自動的に提供される。地理的なエリア内でのデバイスの現在の位置に関する位置情報と日付および時刻とが得られる。関連づけが、現在の位置と、地理学的なエリアのうちの地政学的な区域との間で確立され、地政学的な区域は、タイム・ゾーン適用ルールを含む。ローカル・タイム・ゾーン設定が、デイライト・セービング・タイム(DST)への関与を含み得るタイム・ゾーン適用ルールと現在の日付および時刻とに基づいて自動的に提供される。  (もっと読む)
(もっと読む)
測位システム及び測位方法
【課題】 マッチングによる無線機の位置の推定において、高い測位精度の測位結果を得る。
【解決手段】 測位サーバ10は、セルラ端末20の位置を推定する測位システムであって、位置と当該位置におけるセルラ基地局30に応じた当該電波の伝搬時間との関係を示す情報を保持する測位用データベース11と、セルラ端末20によって受信される、セルラ基地局30に応じた電波の伝搬時間を示す伝搬時間情報を取得する伝搬時間情報取得部12と、取得された伝搬時間情報と、測位用データベース11に保持されている情報とをマッチングする比較部13と、マッチング結果に基づいてセルラ端末20の位置を推定する位置推定部14と、推定されたセルラ端末20の位置を出力する出力部15とを備える。
(もっと読む)
61 - 80 / 298
[ Back to top ]