
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
361 - 380 / 820
自車位置検出装置
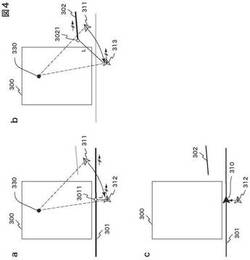
【課題】衛星測位が不能となる駐車場退出直後に自車位置/進行方位を適正に修正する「自車位置検出装置」を提供する。
【解決手段】衛星測位可能に復帰した衛星測位で求まる自車の位置/進行方位320を、旋回中心点330から衛星測位で求まる自車の位置/進行方位320へ向かう線分上に、旋回中心点330を回転中心として回転し、第1仮自車位置/進行方位311とする。第1仮自車位置/進行方位311に整合する各リンク301、302について、リンクの向きと一致するように、旋回中心点330を回転中心として、第1仮自車位置/進行方位311を回転し、第2仮自車位置/進行方位312、313とし、第2仮自車位置/進行方位312、313とリンクとのマップマッチングを行う。そして、各リンクについてのマップマッチングによって求めた位置のうち、最も確からしい位置と当該位置が存在するリンクの向きに、自車位置/進行方位311を修正する。
(もっと読む)
車載用ナビゲーション装置

【課題】車速パルスを用いずとも正確な車速を算出することによってGPS信号の受信が不可能な地点における自車位置を高精度に算出することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車速(GPS受信不能期間の直前におけるGPS信号に基づいて算出された第1の車速a)と、映像速度(GPS受信不能期間の開始時における車載カメラの撮影映像に基づいて算出された映像速度b)との相関関係(速度比K)が、GPS受信不能期間においても維持されるとみなした上で、速度比KにGPS受信不能期間内における映像速度b’を乗じることによって、擬似的な第1の車速として第2の車速a’を算出し、この第2の車速a’を自律航法に用いる。
(もっと読む)
位置検出装置
【課題】移動体の絶対位置を高精度に検出する位置検出装置を提供することを課題とする。
【解決手段】移動体の絶対位置を検出する位置検出装置1であって、移動体の絶対位置を取得する絶対位置取得手段10と、移動体の絶対位置の確率分布を取得する絶対位置確率分布取得手段10と、移動体間の相対位置関係を取得する相対位置関係取得手段11と、3体以上の移動体の絶対位置とその絶対位置の確率分布及びその3体以上の移動体間の相対位置関係に基づいて当該3体以上の移動体の絶対位置を特定する絶対位置特定手段21とを備えることを特徴とする。
(もっと読む)
GPS電波遮断物体検出システム
【課題】他の移動経路(14a,14a)の隣接している移動経路(14,14)にGPSアンテナ11が設置されても、高い精度・確度でGPS電波遮断物体(15)を検出する。
【解決手段】GPSアンテナ11と、そのGPS信号を処理して測位結果を出力するGPS受信機12と、その出力Sに基づく電波受信の成否に応じてGPS電波遮断物体の存否を判断する判定装置14と、GPS電波遮断物体の検出に使用するGPS衛星(16)をその方位・仰角・受信レベルと選別用データの方位・仰角・強度閾値との比較に応じて選別する選別手段13cと、その選別結果を一定期間に亘って保持するバッファ手段13dと、移動経路(14,14)に係る進行方向に基づいて選別用データのうち方位の部分を自動設定する方位設定手段13bとを備える。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法
【課題】送信機からの電波の回折度合いを推定し、推定結果に応じて車両の位置を精度良く特定することができる電波回折推定装置、電波回折推定システム、コンピュータプログラム及び電波回折推定方法を提供する。
【解決手段】制御部30は、周辺車両300の形状情報、位置情報を取得し、自車両の予測位置を求め、送信機200との仮想直線を特定する。制御部30は、送信機200からの電波を受信して電波測位位置を求める。制御部30は、周辺車両300の形状情報、車間距離、仮想直線などに基づいて周辺車両300による仮想遮蔽面を特定し、仮想遮蔽面と仮想直線などに基づいて電波の回折角度θを算出する。制御部30は、算出した回折角度に応じて重み付け係数を設定し、設定した重み付け係数、予想位置及び電波測位位置に基づいて、自車位置を特定する。
(もっと読む)
改善されたナビゲーション装置及び方法
比較的弱いGPS信号のみが利用可能な場合の、ナビゲーション装置(500)の位置を決定する方法と、このような状況で自身の位置を決定できるナビゲーション装置とが説明される。この方法は、複数のGPS衛星(51−54)から複数のGPS信号(502)を受信する工程と、衛星のそれぞれに特有の識別情報とともに信号の一部を構成するタイミング情報から、距離情報を決定する工程と、信号のそれぞれの一部をさらに構成する、衛星のそれぞれに特有の軌道歴データペイロードの全体を受信及び格納することを試みる工程とを含む。この方法はさらに、無線通信プロトコルを用いて、近傍の装置(508)との通信(510)を確立する工程と、近傍の装置が、特定された衛星についての衛星位置に関する軌道歴データ又は軌道歴データの特定の部分を、既に格納していることを判定する工程と、特定された衛星についての軌道歴データ又は軌道歴データの特定の部分を、要求及び受信する工程と、ナビゲーション装置が続けて、距離情報と、距離情報が決定された衛星に特有の無線で受信された軌道歴データと、を用いてナビゲーション装置の位置を決定する工程と、を含むことを特徴とする。 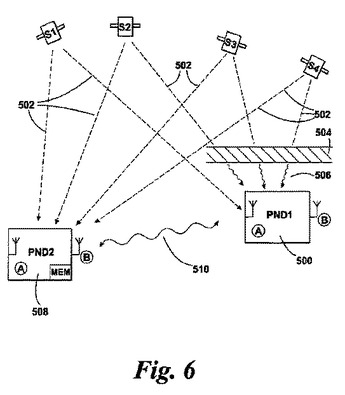 (もっと読む)
(もっと読む)
測位方法
【課題】マルチパスの誤検出および未検出を低減しマルチパスの影響を受けない高精度な位置を表示する。
【解決手段】測位衛星が発信する軌道情報および時刻情報を受信するステップ(201)と、受信した時刻情報をもとに測位衛星と受信機との間の擬似距離を算出するステップ(206,207)と、受信した軌道情報および時刻情報をもとに前記測位衛星の位置を算出するステップと、算出された擬似距離および測位衛星の衛星位置をもとに受信機の現在位置を算出するステップと、受信機の予測位置を算出するステップと、受信機の予測位置および測位衛星の衛星位置をもとに擬似距離の予測量を算出するステップと、前記擬似距離と擬似距離の予測量の差分をもとに擬似距離の予測観測誤差を算出するステップ(208)と、前記予測観測誤差を予測観測誤差の標準偏差で除算した結果をもとにマルチパスの発生の有無を判断するステップ(209,210)を備えた。
(もっと読む)
マルチパス信号判定方法、信号適否判定方法、測位演算方法、プログラム及びマルチパス信号判定回路
【課題】演算量を増加させたり、回路規模を増大させることなく、マルチパス信号の判定を適切に行うこと。
【解決手段】相関演算を行った各サンプリング位相の相関値それぞれをIQ座標上に順次プロットした場合に、それらのプロット位置が閉曲線状に配列されているか否か、或いは直線状に配列されていないか否かを検出するといった簡単な方法で、受信信号がマルチパス信号であるか否かを判定する。更に、配列された閉曲線の広さに基づいて、測位に使用可能か否かを判定する。
(もっと読む)
衛星測位システム使用可能なメディア測定システムおよび方法
【課題】意図された目的(メディアディスプレイ露出)のためにメディアディスプレイ位置のような種々の位置の効果を決定する監視装置を提供する。
【解決手段】監視装置200は、多数の調査応答者に分配されている。監視装置200は応答者の移動を追跡する。応答者の移動を追跡するために種々のテクノロジーが使用されることができるが、監視装置200の位置追跡の少なくともいくつかは、全地球測位システム(“GPS”)のような衛星105の位置決定システムを使用する。応答者および監視装置200のこれらの移動は、ある地点で、いくつかのメディアディスプレイ150への露出と一致する。監視装置によって収集されたジェオデータ(移動データ)は、応答者がどのメディアディスプレイ150に露出されたかを決定するダウンロードサーバ300にダウンロードされる。露出決定は事後処理サーバ400によって行われる。
(もっと読む)
車車間相対位置算出装置、車車間相対位置算出装置に送信する送信装置、車車間相対位置算出装置用のプログラム、および送信装置用のプログラム
【課題】衛星航法用衛星からの信号に基づいて2台の車両間の相対位置関係を算出する技術において、算出の精度を従来よりも向上させる。
【解決手段】以上のように、車両1、2の車載通信装置は、複数のGPS衛星3〜6から電波を受信し、受信した当該電波の搬送波位相を特定する。そして車載通信装置は、他車両(車両1の場合は車両2、車両2の場合は車両1)から、当該他車両において観測された搬送波位相の情報を受信する。そして車載通信装置は、他車両から受信した搬送波位相と、自車両の搬送波位相のうち、同時刻に観測されたもの同士のずれ(一重差、二重差等)に基づいて、干渉測位の方法により、自車両の他車両に対する相対位置を算出する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】2種類の測位処理を適切に切り替えて測位結果の精度向上を図ること。
【解決手段】携帯型電話機1において、第1の測位モードと第2の測位モードとのうち、
現在の時刻(今回)の測位モードで実行したKF測位処理の測位結果の精度に応じて、次
の時刻(次回)以降の測位モードが第1の測位モード又は第2の測位モードに切り替えら
れる。第2の測位モードに切り替えられた場合には、KF測位処理が継続的に行われるこ
ととなり、第1の測位モードに切り替えられた場合には、KF測位処理の継続は中断され
て、一旦LS測位処理が行われた後に、その測位結果を基礎値としたKF測位処理が行わ
れる。
(もっと読む)
測位装置
【課題】高い周波数で測位を行いつつも、そのような周期で測位を行った際に生じる測位精度の低下を抑制する。
【解決手段】GPS信号を用いて少なくとも2種類の周期でGPS測位を行うことができるように構成されたGPS測位手段と、所定の条件に基づいてGPS測位の精度が低いか否かを判定するGPS測位精度判定手段と、GPS測位の精度が低いと判定された場合には、GPS測位手段が第1の周期でGPS測位した結果に基づいて最終的な測位結果を計算し、GPS測位の精度が低くないと判定された場合には、GPS測位手段が第1の周期よりも短い第2の周期でGPS測位した結果に基づいて最終的な測位結果を計算する最終測位結果計算手段とから測位装置を構成する。
(もっと読む)
自車位置検出装置
【課題】 座標誤差により方位が違っていると使用者に感じさせること(方位のアンマッチ感)を軽減することができる自車位置検出装置を提供すること。
【解決手段】 自車の方向を自車からの通信による座標位置から演算し、表示部18で自車方向を表示し使用者を自車へ誘導する携帯機1において、表示部18は、自車の方向を示す指向性表現と自車位置までの距離感の表現を一体化したA方向〜H方向の第1表示401〜第7表示407を備えた。
(もっと読む)
受信信号判定方法、プログラム、測位装置及び電子機器
【課題】クロスコリレーションを適切に検出して、測位精度の向上を図ること。
【解決手段】携帯型電話機1において、受信したGPS衛星信号に対して、複数のPRN
コードのうちの一のPRNコードのレプリカコードを用いた相関演算が、当該レプリカコ
ードの位相をずらしつつ行われる。また、相関演算により得られた積算相関値「P」の中
から全体ピーク値「PT」と離隔ピーク値「PF」とが選択され、受信したGPS衛星信号
が一のPRNコードで拡散変調されたGPS衛星信号であるか否かを判定するための全体
ピーク値「PT」の閾値「Pθ」が、離隔ピーク値「PF」に基づいて可変される。そして
、全体ピーク値「PT」が閾値「Pθ」を超えたか否かが判定されることにより、受信し
たGPS衛星信号が一のPRNコードで拡散変調されたGPS衛星信号であるか否かが判
定される。
(もっと読む)
ナビゲーション装置及びナビゲーション関連情報表示方法
【課題】本発明は、測位結果に信頼性があることを分かり易く提示できるようにする。
【解決手段】本発明は、複数のGPS衛星から複数の軌道データS2(S2A、S2B、S2C)を取得し、軌道データS2(S2A、S2B、S2C)及び複数のGPS衛星との距離データに基づいて自身の現在位置を測位し、測位を行うに足りる複数の軌道データS2(S2A、S2B、S2C)を取得し終わるまでの取得経過レベルをレベルマークLMとして表示部13に表示し、現在位置の測位に用いることが許された複数の軌道データS2(S2A、S2B、S2C)に対する有効残時間をカウントし、当該有効残時間をレベルマークLMに対するグラデーション化表示によって提示する。
(もっと読む)
GPS測位装置及びGPS測位方法
【課題】GPS受信機側に新旧の衛星情報が混在する場合であっても、適切な測位演算が可能なGPS測位装置及び測位方法を提供することを目的とする。
【解決手段】複数のGPS衛星から定期的に受信した前記複数のGPS衛星の各々の最新の衛星情報を記憶する衛星情報記憶手段と、前記衛星情報記憶手段により記憶された前記複数のGPS衛星の各々の最新の衛星情報に、最新の衛星情報と最新ではない前回受信時の衛星情報が混在して記憶されているか否かを判断する新旧混在判断手段と、前記新旧混在判断手段による判断結果に応じて、当該GPS測位装置の位置座標を測位演算する測位演算手段とを有することを特徴とするGPS測位装置。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置が、測位した座標を表す車載側測位座標および測位に係る精度を表す車載側測位精度を取得し、取得した車載側測位座標および車載側測位精度を携帯端末装置へ送信し、携帯端末装置は、測位した座標を表す携帯側測位座標および測位に係る精度を表す携帯側測位精度を取得し、車載側測位精度および携帯側測位精度に基づき、車載側測位座標および携帯側測位座標から車両位置を算出するように測位システムを構成する。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置は、測位した座標を表す車載側測位座標を含む車載側測位データを取得する車載側測位手段と、車載側測位手段が取得した車載側測位データを携帯端末装置へ送信する送信手段とを備え、携帯端末装置は、測位した座標を表す携帯側測位座標を含む携帯側測位データを取得する携帯側測位手段と、車載側測位手段および/または携帯側測位手段を測位環境に基づいて選択する選択手段と、選択手段によって選択された測位手段に係る測位座標に基づいて前記車両位置を算出する車両位置算出手段とを備えるように測位システムを構成する。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる擬似距離の測定精度を考慮した重み付きDOPを算出すること。
【解決手段】本発明は、観測可能な複数の衛星10からの信号に基づいて移動体90の位置を測位する測位手段40A,40B,40Cを備える移動体測位装置1,2,3において、衛星からの信号に含まれうるノイズ量を衛星毎に推定するノイズ量推定手段70と、前記ノイズ量推定手段により推定された衛星毎のノイズ量に基づいて重み行列Rを作成し、該作成した重み行列を用いて、DOP(dilution of precision)に重み付けを行うことで、重み付きDOP(WDOP)を算出する重み付きDOP算出手段とを備えることを特徴とする。
(もっと読む)
361 - 380 / 820
[ Back to top ]