
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
301 - 320 / 820
GPS位置特定装置及びそのための方法
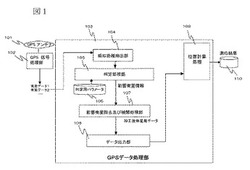
【課題】マルチパス成分によるGPSの測位性能の劣化を低減して誤差要因を除去して、単独でも位置特定精度を向上可能な位置特定装置、及び、その方法を提供する。
【解決手段】複数のGPS衛星からの電波を受信するGPS受信部と、GPS受信部で受信した電波から複数のGPS衛星の各々に対して、擬似距離を含む衛星データを出力するGPS信号処理部とを含み、単独で設けられたGPS位置特定装置において、GPS信号処理部から得られる、各衛星毎の衛星データから前記擬似距離を抽出し、抽出した擬似距離に含まれるマルチパス成分の有無を判定し、マルチパス成分の有無の判定に基づいて、擬似距離に対する加工処理の判定を行い、そして、擬似距離を含む衛星データを利用して位置計算処理を行う。即ち、受信データ中に含まれる擬似距離の変化量を使用して、マルチパスによる誤差要因を判定する解析処理と除去及び補正処理を行う。
(もっと読む)
ロバストなロケーション推定
位置の信頼できる推定を補足するために情報を収集する方法が提供される。方法は、第1の位置の信頼できる推定を導き出すのに十分な第1の情報を受信するステップと、第1の位置の付近の第2の位置の補足の推定が要求されうることを示す指示を受信するステップと、指示に応答して、第1の位置の付近の観測可能な少なくとも1つの地上無線ソースの識別を備える情報を検知することと、検知された情報を第1の位置に関連して格納するステップとを備える。方法は、第1の位置の信頼できる推定が、続いて少なくとも1つの無線ソースが観測可能である任意の前記第2の位置を推定するために使用されるようにすることができる。 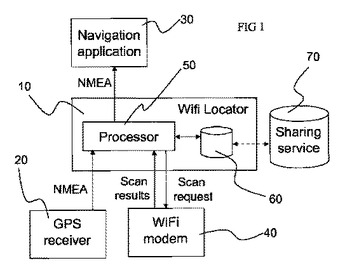 (もっと読む)
(もっと読む)
無線位置特定システム、アンテナ構成、およびアンテナ構成を決定する方法
第1の物体の第2の物体に対する相対位置を特定する無線位置特定システムは、第1の物体に動作可能に結合する第1の無線機を含むことができる。少なくとも高利得領域を有する第1の指向性アンテナは、高利得領域が第2の物体から全体的に外側に方向付けられ、かつ第1の検出範囲を定めるように、第2の物体に取り付けられる。少なくとも高利得領域を有する第2の指向性アンテナは、さらに第2の物体に取り付けられ、さらに高利得領域が全体的に外側に方向付けられ、かつ第2の検出範囲を定めるように方向付けられる。第1および第2の指向性アンテナに接続される第2の無線機は、第1の物体の第2の物体に対する相対位置を特定するために、少なくとも第1の無線機と無線信号を交換する。 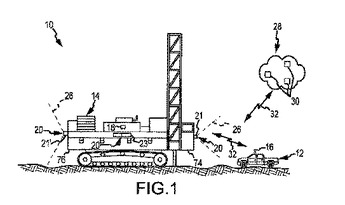 (もっと読む)
(もっと読む)
断続的に位置を報告するための方法および装置
断続的に位置を報告するためのシステム、装置、および方法を提供する。この装置は、全地球測位システム(GPS)の受信機(202)、トランシーバ(206)、およびコントローラ(212)を含む。トランシーバは、WiFiまたはWiMAXのトランシーバである。コントローラは、装置の現在の地理的位置を読み取り、位置監視アプリケーション(LMA)(312)との通信が可能であるか否かを決定する。LMAとの通信が可能ではない場合、コントローラは現在の地理的位置を記憶する。LMAとの通信が再び可能となるとき、コントローラは記憶したいずれかの地理的位置を送信する。コントローラは、地理的位置と関連するタイムスタンプを記憶することができる。コントローラは、あらかじめ定義されたルールによって決定される間隔で地理的位置をLMAに送信することができる。 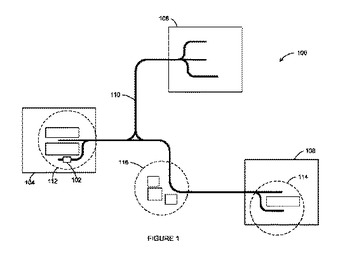 (もっと読む)
(もっと読む)
走行状態推定システム

【課題】自律航法システムとGPSの各方式間の信号の遅延時間を高精度に補償して最終的に決定される測位データの精度を向上させること。
【解決手段】GPS信号に基づき第一のサンプリング周期で測位データを演算して推定手段に出力するGPS測位演算手段と、第一のサンプリング周期より短い第二のサンプリング周期で観測データを出力する自律航法用センサと、第一のサンプリング周期内に自律航法用センサから出力された観測データの組を所定の一次関数に近似する近似式演算手段と有し、該近似式演算手段が、測位データと略同期したタイミングにおける一次関数の近似式の値を切片の値とし、該切片の値を該近似式の傾きの値とともに自律航法データとして推定手段に出力するように構成された走行状態推定システムを提供する。
(もっと読む)
走行位置検知装置
【課題】移動体の位置の検出精度を向上させる。
【解決手段】GPS電波受信アンテナ11の傾斜装置21は、回動軸および三角形状の板であるフレームを有する。走行位置検知装置10の装置本体には、回動軸が装置本体を貫通して移動体5の移動方向に軸方向が沿うように取り付けられる。フレームは、一頂点付近を回動軸が貫通して平板方向が回動軸の軸方向に対して直交するように回動軸に取り付けられる。移動体5が傾斜した場合には、GPS電波受信アンテナ11の平板方向が水平方向に沿ってGPS電波受信アンテナ11の受信面が重力に従って天頂方向を向くように、GPS電波受信アンテナ11がフレームおよび回動軸を介して移動体5に対して当該移動体5の移動方向に直交した方向に回動する。
(もっと読む)
車両による通信を用いて車両の相対的位置を決定する方法
【課題】IEEE802.11に基づいた通信を利用して、第1と第2の車両の相対的位置を決定する方法を提供する。
【解決手段】 本発明の方法において、第1車両が、(a)第2車両からIEEE802.11に基づいた通信を受領するステップと、(b)前記受領した通信に基づいて、前記第2車両の、前記第1車両に対する相対的位置を決定するステップとを実行する。
(もっと読む)
GPSモジュール及びモバイル機器
【課題】良好な感度と小型化を両立させるGPSモジュール及び該GPSモジュールを用いたモバイル機器を提供する。
【解決手段】2つのLNAチップ12と、出力特性インピーダンスがLNAチップ12の入力インピーダンスの共役複素数になるように、アンテナ放射面の外形寸法が決められた2給電のパッチアンテナ11と、入力特性インピーダンスがLNAチップ12の出力インピーダンスの大きさと等しい−3dB方向性結合器13と、LNAチップ12それぞれと−3dB方向性結合器を結び、それぞれの配線長さLがLNAチップ12の出力インピーダンスの位相成分を相殺する電気長となっている配線L1と、−3dB方向性結合器13と接続されるGPS受信回路14と、を備える。
(もっと読む)
無線システムにおけるジオフェンスの動的創出の方法
ジオフェンスデバイスによって受け取られた疑似距離測定値の第1の集合を使用して即時参照点を決定すること、即時参照点へ参照される動的ジオフェンス区域を規定すること、疑似距離測定値の第2の集合を使用して測位を決定すること、及び測位を動的ジオフェンス区域と比較することによって、動的ジオフェンス区域を創出する方法及び装置。1つの態様において、比較結果に基づく警報メッセージがユーザへ提示される。 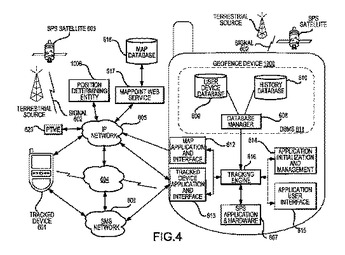 (もっと読む)
(もっと読む)
ワイヤレス・デバイス上で発生したイベントにサービス品質を有するロケーション・フィックスを関連付けるための装置および方法
ワイヤレス通信ネットワーク中で通信しているワイヤレス・デバイスの動作に関連するイベントに対応する地理的位置を推定するための装置および方法。イベントの発生と、それぞれイベントの前および後に測定される第1のロケーション・フィックスおよび第2のロケーション・フィックスのうちの少なくとも1つのワイヤレス・デバイスの関連する時間および速度との間の時間および距離を分析する。得られるフィックスが地上ワイヤレス通信測定に少なくとも部分的に基づくように調整されたサービス品質(QoS)を有する第1および第2のロケーション・フィックス。これらの分析は、地理的位置を検証し、いくつかの例では、イベントに関連付けるべき好適な地理的位置を判断するために、それらのメトリクスを所定の時間しきい値と比較することを含む。 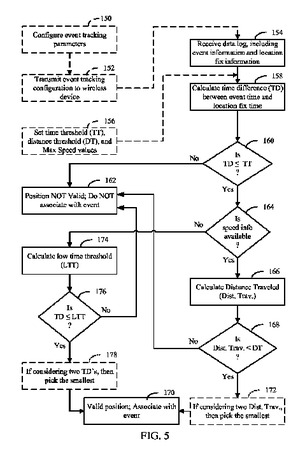 (もっと読む)
(もっと読む)
GPS受信機とGPS信号を処理する方法
【課題】 GPS受信機中の局部発振器を較正すること。
【解決手段】受信機は高精度搬送波周波数信号に自動的にロックし、基準信号を発生し、この基準信号で局部発振器を較正する。
(もっと読む)
追跡方法
【課題】従来技術の欠点を克服できる追跡方法を提供すること。
【解決手段】追跡方法は、対象デバイス(1)が自分の位置情報を取得できるようにするステップと、対象デバイス(1)が、対象デバイス(1)により取得された位置情報と、ウェブサイト上の電子地図を含むウェブページの位置とを含むURLを生成できるようにするステップとを含む。電子地図を含むウェブページは、電子地図と、電子地図上における対象デバイス(1)の位置の表示とを含む。
(もっと読む)
予測衛星軌道暦の提供方法、サーバ及び測位システム
【課題】長期予測エフェメリスのデータ量を削減すること。
【解決手段】測位システム1において、携帯型電話機2は、利用区域を含む第1の要求信号又は最新測位位置を含む第2の要求信号をサーバシステム3に送信する。サーバシステム3は、第1の要求信号を受信した場合は、当該第1の要求信号に含まれる利用区域に対応する区域の長期予測エフェメリスを、要求元の携帯型電話機2に送信する。また、第2の要求信号を受信した場合は、当該第2の要求信号に含まれる最新測位位置が属する区域の長期予測エフェメリスを、要求元の携帯型電話機2に送信する。そして、携帯型電話機2は、サーバシステム3から長期予測エフェメリスを受信し、当該長期予測エフェメリスを用いて所定の測位演算を行うことで測位する。
(もっと読む)
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。 (もっと読む)
航法装置、航法装置の姿勢角計算方法および姿勢角計算プログラム
【課題】移動体が変形し、GPSアンテナ間の相対位置に変化が生じた場合でも、GPSアンテナ間の基線ベクトルに基づいて移動体の姿勢角を高精度に推定できるようにすることを目的とする。
【解決手段】移動体の機体には迎角センサ271,動圧センサ272および静圧センサ273が設置される。変形量推算部230は迎角センサ271、動圧センサ272および静圧センサ273から迎角α、動圧qおよび大気圧pを取得し、迎角α、動圧qおよび大気圧pに基づいて機体の変形量dBを計算する。基線ベクトル変化量推算部231は機体の変形量dBに基づいてGPSアンテナ間の基線ベクトルの変化量dbiを計算する。基線ベクトル補正部232は変化量dbiを加算して既知の基線ベクトルを補正する。そして、姿勢角計算部220は補正により得られた基線ベクトルに基づいて移動体の姿勢角(ロール角φ、ピッチ角θ、ヨー角ψ)を推定する。
(もっと読む)
同期通信システムのためのマルチセクター速度、モバイル速度及びドップラー推定のための装置及び方法
速度及びドップラー周波数を推定する装置及び方法は、第1の時刻に第1の複数の基地局から第1の複数の到達時間(TOA)メジャーメントを取得することと、第2及び第3の時刻に第2及び第3の複数の基地局から第2及び第3の複数の到達時間(TOA)メジャーメントを取得することと、前記第1、第2及び第3の複数のTOAメジャーメントを使用して、複数の視線距離メジャーメントを判定することと、前記複数のLOS距離メジャーメントを使用して、複数の速度推定及び複数の到来角(AOA)推定を判定することと、前記複数の速度推定及び前記複数のAOA推定を使用して、複数のドップラー周波数推定を判定することと、複数のセクターにわたって平均ドップラー周波数推定を判定するためにプロセッサを使用すること(前記第1、第2及び第3の複数のTOAメジャーメントは、前記複数のセクターにわたって得られる)を含む。  (もっと読む)
(もっと読む)
ナビゲーション装置及び受信感度制御方法
【課題】本発明は、衛星信号の受信感度が低減することを防止し得る使い勝手の良いナビゲーション装置提案する。
【解決手段】本発明は、衛星から衛星信号S1を受信して復調することによりエフェメリスデータS2を取得し、衛星信号S1の受信感度が低減することを回避すべく、GPSモジュール12を除く他の周辺デバイスにおける動作周波数を低減させるように制御することにより、周辺デバイスからの不要輻射電波のエネルギーが減少することになるため、衛星信号S1を受信するときの感度低減を抑制し、良好な通信環境を維持することができると共に、他の部位による機能を停止させずに済む。
(もっと読む)
衛星システムを用いたインターネットホットスポットの位置決め
種々の実施形態により、衛星信号をインターネットホットスポット信号と統合することにより、減衰した環境においてナビゲーションを行うためのシステムと方法が開示される。一実施形態では、位置情報取得を行う受信装置は、衛星から、周期的に反復するコードを含む精密時間信号を受信し、無線ネットワークステーションから、追加的な補助情報を受信するアンテナを備えている。この受信装置は、プロセッサと、コンピュータで読み取り可能な複数の指令を記憶するメモリも備えており、これらのコンピュータで読み取り可能な複数の指令がプロセッサによって実行されることにより、受信装置は、精密時間信号と追加的補助情報とを使用して正確な絶対時間を求め、受信装置に関する位置決め情報を求め、この位置決め情報を使用して無線ネットワークステーションの位置情報を要求し、且つ位置決め情報と位置情報とを使用して受信装置の絶対位置情報を求める。 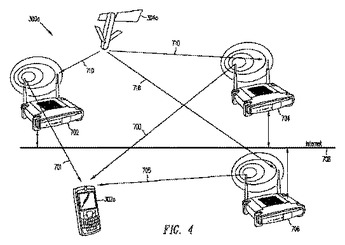 (もっと読む)
(もっと読む)
補正値予測式推定方法、位置特定用補正値の算出方法、補正値予測式推定プログラムおよび位置特定用補正値算出プログラム
【課題】膨大な補正値を用いる必要なく高精度に位置特定できるようにする。
【解決手段】移動局は、単独で測位し(S1)、基準局に概略位置を送信する(S2)。基準局は、最も近い基準局を選択し補正値予測式を選択し(S3)、予測式の係数または補正値予測式を送信し、移動局は、送信された予測式の係数または補正値予測式を用いて測位計算する(S6)。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】測位率や測位結果の正確性の向上を可能ならしめること。
【解決手段】第1の高分解能相関積算処理を開始してから第3の閾値時間が経過した時刻
「T3」において、第2の高分解能相関積算処理を開始する。そして、第1の高分解能相
関積算処理を開始してから第2の閾値時間(>第3の閾値時間)が経過した時刻「T4」
において、当該第1の高分解能相関積算処理の処理結果から得られる擬似距離用コード位
相を用いて測位演算を行うとともに、第1の高分解能相関積算処理を再び最初から開始す
る。また、第2の高分解能相関積算処理を開始してから第2の閾値時間が経過した時刻「
T5」において、当該第2の高分解能相関積算処理の処理結果から得られる擬似距離用コ
ード位相を用いて測位演算を行うとともに、第2の高分解能相関積算処理を再び最初から
開始する。
(もっと読む)
301 - 320 / 820
[ Back to top ]