
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
241 - 260 / 820
通信装置、処理方法、プログラム、DSRCユニット、路側機および車載装置

【課題】車両に対して実際の走行軌跡に基づいて交通管理をできるようにすること。
【解決手段】車載装置100は測定部120で測位を行い、測位した位置情報を車載装置100を搭載した車両の移動情報としてドライブレコーダー130に記憶する。路側機200の路側機通信部210は近くを通行した車両に搭載された車載装置100のDSRCユニット110と通信し、識別情報記憶部140に記憶された車載装置100の識別情報を取得する。情報センター300の情報センター通信部310は車載装置100の移動情報と路側機200が通信した車載装置100の識別情報とを受信する。移動情報判定部320は移動情報に識別情報を取得した路側機200の所在位置が含まれるかを判定し、含まれない場合、移動情報を誤った情報として処理する。課金部340は正しい情報であると判定された移動情報に対して課金処理を行う。
(もっと読む)
追従制御装置及び追従制御方法

【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に対する移動目標としての電波発信源8の位置を推定し、推定した電波発信源8の位置に向かうように車両1の移動を制御する追従制御する技術である。上記車両1に対し平面視で互いに重ならない位置に複数の無線通信手段を設定して、上記電波発信源8からの電波の受信に基づき、各無線通信手段から電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置情報を推定する。そして、推定した相対位置情報に含まれる誤差が小さなる領域に、車両1の移動すべき方向を設定する。
(もっと読む)
位置・時刻算出装置および時計
【課題】 アンテナの配置やサイズに制約が大きい小型の機器であっても、GPS電波を適切に受信することができる。
【解決手段】 時計装置10は、直交する3軸方向(X軸、Y軸およびZ軸)のそれぞれの加速度成分を検出する3次元加速度センサを含む加速度検出回路34を有する。アンテナ12は平面状で、かつその指向性がアンテナの面に対して垂直方向にあり、3次元センサは、アンテナの面と平行にX軸、Y軸を有し、垂直方向にZ軸を有する。CPU12は、3次元加速度センサのX軸、Y軸およびZ軸の成分に基づき、アンテナにおいて適切な指向性を示す、当該アンテナの最適方向を算出し、表示部32に表示する。
(もっと読む)
列車位置測定装置および列車位置測定方法
【課題】地上子からの位置情報および速度発電機からの出力情報を用いることなく、列車の現在位置を測定すること。
【解決手段】電波測位部3aは、電波で送られる信号の受信結果に基づいて現在位置の経度および緯度を測位し、マップマッチング処理部3cは、電波測位部3aにて測位された現在位置を線路マップ上の線路上に合致させ、現在位置演算部3dは、マップマッチング処理部3cにて合致された線路上の位置を起点とし、列車の加速度の検出結果から求めた走行距離を参照することで、線路上での列車の現在位置を演算する。
(もっと読む)
車両用通信装置
【課題】比較的短い距離内で異常な動きを伴わない車両の位置情報の誤りであっても検出できる車両用通信装置を提供する。
【解決手段】要請フレームで特定される送信フレームに含まれた他車両の位置、その送信フレームを受信した自車両の位置及びその送信フレームが到来した方向を読み出し(S305)、自車両の受信位置及び他車両の位置を結んだ直線と、その送信フレームが到来した方向とがなす角が予め定められた設定値よりも大きいか否かを判断し(S308)、設定値よりも大きければ(S308:YES)、応答フレームの「位置詐称」フラグを「1」として、応答フレームをブロードキャスト通信により周辺の他車両に送信する(S309)。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルター処理を用いた位置算出において算出位置の直進性を向上させること。
【解決手段】位置算出装置を具備した携帯型電話機において、カルマンフィルター処理で用いる位置変化の許容度を表す位置変化許容パラメーターの値を、検出された移動方向に基づいて設定する。そして、設定した位置変化許容パラメーターの値を用いてカルマンフィルター処理を実行して位置を算出する。
(もっと読む)
移動体端末の位置の実時間差の決定の方法及び装置
コアネットワークと通信を行う複数のeノードBを含み、前記複数のeノードB各々は複数の関連セルを有しており、前記複数の関連セル各々は1つ以上の移動体端末に対してサービスを行う潜在的能力がある通信システムの移動体端末についての実時間差の決定を行う方法において、前記移動体端末と第1のサービングeノードBとの間の第1の地理的な距離尺度の代表値である第1のタイミングアドバンス値を、第2のサービングeノードBへのハンドオーバに先立って決定し(S10)、前記移動体端末と前記第2のサービングeノードBとの間の第2の地理的な距離尺度の代表値である第2のタイミングアドバンス値を、前記ハンドオーバの後に決定する(S20)。これに続き、前記移動体端末と少なくとも2つのeノードBとの間の少なくとも到来時刻の尺度を決定し(S30)、前記移動体端末についての前記決定された第1と第2の地理的な距離尺度と前記決定された到来時刻の尺度との代表値を少なくとも前記第2のサービングeノードBに対して、前記少なくとも2つのeノードBのユニークな識別パラメータ各々とともにシグナリングする(S40)。ここで、前記実時間差の決定が、少なくとも前記シグナリングされた代表値に基づいて可能になる。 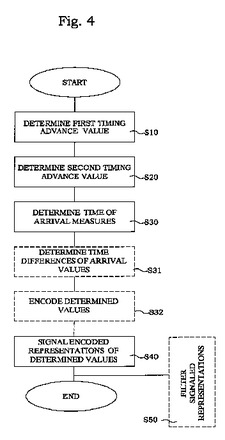 (もっと読む)
(もっと読む)
GPS機器及びプログラム
【課題】 GPS衛星の測位情報を報知する際に、面白みのある表示画面を提供する
【解決手段】 自車の現在位置と、各GPS衛星の方位角及び仰角をGPS受信機より取得する。そして、自車を中心として平面上に円Sを描き、円の中心Oを自車位置とする。制御部は、円を直径とする半球を想定し、上記半球上の方位角及び仰角の対応する位置に衛星の形状の3DのオブジェクトGobを置く。よって、円の中心に近い位置にあるGPS衛星は平面との距離が高い位置へ描画され、円の中心から遠い位置にあるGPS衛星は平面との距離が低い位置へ描画される。GPS衛星の3Dのオブジェクトからは、真下方向(平面に垂直な方向にガイド線GSを引き、ガイド線と平面の交わる点に、交点を示すオブジェクト(交点オブジェクト)Kob(例では×)を描画する。全てのGPS衛星が見渡せる位置・範囲に仮想のカメラを設定し、撮影した状態で各オブジェクトを描画する。
(もっと読む)
車載システム
【課題】GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正する「車載システム」を提供する。
【解決手段】光ビーコンアンテナ17の自車上の設置位置と、GPSアンテナ14の自車上の設置位置202の指定を、予めユーザから受け付ける。路側機400から光ビーコンで自車位置情報を受信したならば、光ビーコンアンテナ17の設置位置の位置座標を算出し、光ビーコンアンテナ17の設置位置の位置座標と、ユーザから設置された光ビーコンアンテナ17とGPSアンテナ14の自車の設置位置の相対位置関係より、GPSアンテナ14の設置位置の位置座標を求め、GPS受信機15の衛星測位位置を、求めたGPSアンテナ14の位置座標に一致させる補正情報を設定する。
(もっと読む)
環境計測装置、設備管理システムおよび環境計測方法
【課題】簡単な構成で、多数の計測点の環境情報の計測を少ないセンサ端末にて自動的に行う計測精度の良い実用的な環境計測装置・方法を提供する。
【解決手段】環境計測手段と無線通信手段とを備える複数の固定センサ端末101と、環境計測手段と無線通信手段と駆動手段とを備える1つまたは複数の自走センサ端末102と、該自走センサ端末の位置を検出する無線測位手段とから構成され、無線測位手段は固定センサ端末101と自走センサ端末102との無線通信により距離を求め、自走センサ端末102の位置を検出するようにしたものである。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS受信装置は、測位信号に含まれるコードを用いて、該コードと該コードのレプリカ信号との相関をとり、相関値が最大とされる位相と、該位相に対して進んだ位相及び遅れた位相を求め、GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離演算部と、複数の異なる時定数により、擬似距離を搬送波の位相変化量でフィルタリングするノイズ除去部と、進んだ位相及び遅れた位相に基づいて、所定の時間間隔における進んだ位相に対応する相関値と遅れた位相に対応する相関値との間の大小関係の評価値を求める評価値算出部と、評価値に基づいて、フィルタリングされた擬似距離のうちの一つを出力する選択部とを有する。
(もっと読む)
列車位置検知システム
【課題】鉄道分野という条件を活かし、シンプルな構成で効果的に列車位置検知におけるマルチパス誤差の低減を実現することである。
【解決手段】衛星24からの衛星信号を受信する地上に設置された1つ以上の基準局11は、受信した衛星信号の中から所定個数の衛星組合せを選択し、選択した衛星信号から基準局11の位置を算出し、誤差の小さい衛星の組合せのリストである高優先度衛星組合せ情報を生成して列車13に送信する。列車13の車上装置は、衛星14からの衛星信号を受信するとともに、基準局11で生成された高優先度衛星組合せ情報を受信し、受信した衛星信号の中から位置誤差の小さくなる衛星組合せを選択し、選択された衛星信号を利用して受信した衛星信号に基づき列車の位置を算出する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、GNSS衛星からの測位信号に基づいて、測位演算を行う測位演算部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、直接波と反射波との間の経路差の変化率を推定する経路差変化率推定部と、経路差の変化率に基づいて、測位演算結果と位置推定結果との間の重み付けを設定する重み付け設定部と、設定された重み付けに従って、当該GNSS受信装置の位置を求める位置演算部とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、当該GNSS受信装置が同一のGNSS衛星からの測位信号を捕捉した状態において、直接波と反射波との間で位相差が生じるように配置される複数のアンテナと、同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、各擬似距離の差分を求める擬似距離差分計算部と、該差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、マルチパスの影響を受けていると判定された場合に、前記位置推定部により推定された位置情報を出力する位置情報出力部とを有する。
(もっと読む)
キャリア位相の相対的な測位における送信時間の不確実性を解決すること
キャリア位相の相対的な測位処理を実行するために電子デバイスにおいて使用するための方法および装置が提供される。  (もっと読む)
(もっと読む)
ナビゲーション装置、位置決定システム及び方法
ナビゲーション装置(200)は、識別できる基地局(282,286,290)によってサポートされた無線通信ネットワーク(280)を介してデータを通信する無線通信ユニット(228)を備える。装置(200)は、使用中に、作動環境(262)をサポートするように構成された処理リソース(202)をさらに備え、作動環境(262)は、無線通信ユニット(228)によって受信できる、識別できる基地局(282,286,290)のアイデンティティの少なくともいくつかを、現在位置において無線通信ユニット(228)から受信するように構成された位置決定モジュール(268)をサポートする。位置決定モジュール(268)は複数のデータ関連付けエントリを含むデータ記憶部(214,160)にアクセスすることがでる。データ関連付けエントリの各々は、識別できる基地局のいくつかの記憶されたアイデンティティと、いくつかの記憶されたアイデンティティが受信できる位置に関連付けられた位置識別子とを含む。位置決定モジュール(268)はさらに、複数のデータ関連付けエントリからいくつかの記憶されたアイデンティティに関連する現在位置を決定するように構成されている。 (もっと読む)
全地球航法衛星受信機における解決遅延の制御
【課題】解決遅延の問題を解決する方法および装置を提供すること。
【解決手段】受信した衛星航法信号と受信した非衛星信号とに基づいて位置を算出する衛星測位装置を開示する。ローカル・クロックが衛星信号プロセッサのエポック区間を制御する。衛星信号プロセッサと非衛星信号プロセッサをよりよく同期させるために、ローカル・クロックに補正信号を適用する。
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に設置した複数の無線通信手段Qでそれぞれ上記電波発信源8からの電波を受信して、各無線通信手段Qから電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置座標を取得する。無線通信手段Q毎に基準通信距離L内の検出設定エリアをそれぞれ想定し、その複数の検出設定エリア及びその検出設定エリアの重なりで区分される複数の存在判定エリアのうち、電波発信源8がどの存在判定エリアに位置するか上記取得した複数の相対距離から推定する。推定した存在判定エリアに基づき、目標位置取得手段3Bが取得した電波発信源8の相対位置座標の正当性を判定し、正当と判定した電波発信源8の相対位置座標に向けて車両1の移動を制御する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】測定精度を向上させること。
【解決手段】GNSS受信装置は、GNSS衛星からの測位信号に含まれるコードを用いて、当該GNSS受信装置により観測すべきデータを求める手段と、GNSS衛星からの測位信号に含まれる軌道情報に基づいて、GNSS衛星の位置を算出する手段と、測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する手段と、算出されたGNSS衛星の位置と、推定された当該GNSS受信装置の位置とに基づいて、GNSS衛星と当該GNSS受信装置との間で観測すべきデータを推定する手段と、当該GNSS受信装置の有する誤差に起因する観測データの誤差を推定する手段と、観測データと、観測データ推定値と、受信装置誤差推定値に基づいて、観測データに含まれる誤差を推定する観測データ誤差推定部と、推定された観測データ誤差が所定の閾値以下である観測データを用いて測位演算を行う手段とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、測位信号に含まれるコードを用いて、GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離演算部と、GNSS衛星からの直接波と反射波との間の経路差の変化率を推定する経路差変化率推定部と、経路差変化率推定部により推定された経路差の変化率に対応するフィルタの時定数を求め、該時定数を設定する時定数設定部と、時定数設定部により設定された時定数で、擬似距離演算部により求められた擬似距離を搬送波の位相変化量でフィルタリングするノイズ除去部とを有する。
(もっと読む)
241 - 260 / 820
[ Back to top ]