
Fターム[5J062BB01]の内容
Fターム[5J062BB01]に分類される特許
181 - 200 / 820
捕捉周波数決定方法及び受信装置

【課題】捕捉周波数を正確且つ効率的に求めるための新たな手法を提案すること。
【解決手段】GPS衛星信号の受信信号に対して概略的な周波数探索処理である第1種相関演算処理を実行する。そして、第1種相関演算処理で用いる相関積算時間である第1種相関積算時間に基づいてメインローブとサイドローブ間の周波数を算出し、当該周波数と、第1種相関積算処理で相関値が最大となった周波数とを用いて、サイドローブチェック用周波数を設定する。そして、第1種相関積算処理で相関値が最大となった周波数と、サイドローブチェック用周波数とを含めて複数のサーチ周波数を選択し、選択した各サーチ周波数で第2種相関演算処理を行う。そして、第2種相関演算処理で相関値が最大となったサーチ周波数を判定して捕捉周波数に決定する。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置

【課題】時間の経過と共に更新が必要な測位の補正データについて、データ送信量の低減と、より新しい補正データの提供とを両立させ、提供する補正データの精度を向上させる装置を提供する。
【解決手段】データ送信部は、それぞれの測位補強情報を伝送周期10秒で伝送する。第1計算部は、データ送信部により所定の順序に従って伝送中の測位補強情報31−1の伝送周期10秒の間に、基準点固有誤差を新たに計算する。第2計算部は、伝送中の測位補強情報31−1の伝送周期10秒の間に、それぞれの測位補強情報41〜43を新たに計算された基準点固有誤差に基づいて新たに生成する。データ送信部は、新たに生成された測位補強情報41〜43のうちの一つの測位補強情報42−1を所定の順序に従って伝送中の測位補強情報31−1の次に配信装置に伝送すると共に、所定の順序を周期的に繰り返しながら、測位補強情報を順次に前記配信装置に伝送する。
(もっと読む)
無線通信システムにおける協調多機能通信のための方法および装置
記載された装置および方法は、少なくとも1つの遠隔アクセス端末の機能を判定し、この機能に基づいて、少なくとも1つのタスクを、少なくとも1つの遠隔アクセス端末へ委任する、ように構成されたコントローラを含みうる。  (もっと読む)
(もっと読む)
車両用推定航法装置、車両用推定航法及び車両用推定航法のプログラム
【課題】追加のセンサを用いることなく正確な推定航法を行うことができる車両用推定航法装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から当該車両の走行速度の速度ベクトルを算出する速度ベクトル算出手段と、前記車両に装着されたタイヤ回転情報検出手段から当該タイヤの回転速度を算出するタイヤ回転速度算出手段と、前記速度ベクトルの情報に基づいて車両の速度を算出する速度算出手段と、前記速度ベクトルの情報に基づいて車両のヨーレートを算出するヨーレート算出手段と、前記速度算出手段により算出される車両速度と前記タイヤ回転速度との第1関係式の第1パラメータを算出する第1パラメータ算出手段と、前記ヨーレート算出手段により算出されるヨーレートと前記タイヤ回転速度との第2関係式の第2パラメータを算出する第2パラメータ算出手段とを備えている。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
相対位置算出装置
【課題】自車両の他車両に対する相対位置を高精度に算出する。
【解決手段】相対位置算出装置100は、自車両の測位位置を取得する測位位置取得手段110と、他車両が取得する他車両の測位位置を他車両から受信する他車両位置受信手段122と、他車両が他車両の測位位置を取得するために利用する測位衛星を示す他車両測位利用衛星情報を他車両から受信する他車両衛星情報受信手段123と、測位位置取得手段が自車両の測位位置を取得するために利用する自車両測位利用衛星と他車両測位利用衛星とが互いに異なる場合には、測位利用衛星を一致するように変更する測位利用衛星変更手段124と、変更された自車両測位利用衛星を利用して測位位置取得手段によって取得された自車両の測位位置と他車両位置受信手段によって受信された他車両の測位位置とに基づいて、自車両の他車両に対する相対位置を算出する相対位置算出手段125とを備える。
(もっと読む)
ヘディングを決定するためのシステムおよび方法
【課題】運行の期間中にS字ターンのような伝統的な整合手順を要求すること無く、運行ビークルのヘディングを決定するためのシステムおよび方法を提供する。
【解決手段】運行ビークル上に搭載可能なヘディングを決定するためのシステムは、第1の時点および第2の時点でキャプチャされ照合された複数の識別特徴のそれぞれについて、所与の照合された識別特徴に関連する第1の単位ベクトルと、その所与の照合された識別特徴に関連する第2の単位ベクトルとを決定する画像システムと、第1の時点から第2の時点までキャプチャされるキャリア位相情報に基いて並進ベクトルを決定するGPSと、補正されたヘディングを決定するために、複数の照合された識別特徴のそれぞれについてエピポーラ方程式における誤差を、それぞれの第1の単位ベクトルと第2の単位ベクトルと並進ベクトルとに基いて最小化する結合プロセッサとを備える。
(もっと読む)
測位装置及びプログラム
【課題】擬似距離誤差を精度良く算出して、受信位置を精度良く算出できるようにする。
【解決手段】測位演算部26によって、複数の測位衛星の擬似距離に基づいて、測位衛星の組み合わせ毎に、受信位置を算出する。高度誤差算出部30によって、測位衛星の組み合わせ毎に、高さ誤差を算出する。正常衛星選択部32によって、正常な測位衛星を4つ選択する。観測誤差算出部34は、測位衛星の組み合わせ毎の高さ誤差と擬似距離誤差との関係式、及び正常な測位衛星についての高さ誤差と擬似距離誤差との関係式を含む連立方程式を解くことにより、複数の測位衛星の擬似距離誤差を算出する。誤差補正測位演算部36によって、算出された複数の測位衛星の各々の擬似距離誤差を用いて、受信位置を算出する。
(もっと読む)
事故防止監視制御システム
【課題】オペレータに危険距離に近いことを報知して回避させると共に、最悪の事態(接触事故)が発生した場合でも重大事故に拡大することを防止する事故防止監視制御システムを提供する。
【解決手段】この監視制御装置7は、GPS衛星5からの信号に基づいて得られたクレーン車8に係る位置情報を取得する位置情報取得手段11と、クレーン車8の所定範囲内に位置する送電線に係る情報を格納した送電線情報格納手段12と、クレーン車8に係る位置情報と送電線3に係る位置情報とを照合する照合手段13と、照合手段13による照合結果に基づいてクレーン車8と送電線3との離隔距離を判定する離隔距離判定手段14と、離隔距離判定手段14により判定された離隔距離が所定の安全距離よりも短い場合にクレーン車8に対して警報を発する警報発信手段15と、自動復旧装置の使用の可否を制御する自動復旧装置制御手段18と、を備えて構成されている。
(もっと読む)
GPS軌跡を用いた付加的マップ生成、改良および拡張
GPS使用可能なナビゲーション装置によって記録される統計的に関連する量のプローブデータから、既存ネットワークを改良および拡張し、新しいネットワークを生成する方法。新しいプローブデータは既存のデジタルベクトルマップとマッチングされ、次にそのデータは、加重平均技術を使用して既存ネットワークへ結合される。新しい道路が検出されると、適切なジャンクション地点が既存ネットワーク要素から作られる。計算速度を向上し、データストレージ要求を低減するために、更新されたネットワークデータは単純化される。 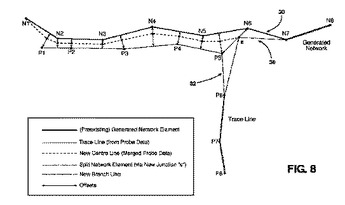 (もっと読む)
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
GPSレシーバ及びナビゲーションシステム
【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
走行リンク確定装置及びリンク旅行時間算出装置
【課題】確定リンクが連続しない不連続区間が生じたときでも、不連続区間を精度良く補間する。
【解決手段】リンクマッチ処理部31は、リンク単位で位置座標が定義されている地図データと、異なる時刻における移動体位置座標を含む移動体位置データとを比較して、各移動体位置座標に対する一または複数の候補リンクを抽出する。走行リンク確定部33は、一または複数の候補リンクの中から、一のリンクを確定リンクとして抽出する。補間処理部35は、深度がN(Nは3以上の自然数)以下で不連続区間を結ぶ補間経路が唯一存在し、かつ、その唯一の補間経路の深度がN−2以下であれば、その唯一の補間経路を確定リンクとして不連続区間を補間する。
(もっと読む)
測位組み合わせ決定システム
【課題】目標とする測位精度を達成可能な走行環境に合わせた好適な測位組み合わせを、対象とする走行環境内での実機実験なしに選択可能とする、即ち、低コストで目標とする測位精度を達成可能な測位組み合わせを決定する。
【解決手段】ビークルで用いる複数測位手段の組み合わせを決定するシステム(1)であって、走行環境中の場所毎に決定される測位精度影響パラメータを記憶する手段(7)と、測位精度影響パラメータと複数測位手段の測位精度との関係を記憶する手段(9)と、測位精度影響パラメータと複数測位手段との対応情報を記憶する手段(6)と、走行環境における測位精度影響パラメータを取得する手段(8)と、その測位精度影響パラメータの対応情報を取得し、その対応情報に基づいて前記関係を参照して走行環境中の各位置における複数測位手段の測位精度を予測する手段(10)と、を備え、複数測位手段の組み合わせに対する測位精度を予測する。
(もっと読む)
GPS受信機
【課題】アベイラビリティの低下を招くことなく、擬似距離誤差を低減して、測位精度を高めることができるGPS受信機を得ることを目的とする。
【解決手段】信号処理手段により今回計測された擬似距離変化率を用いて、その擬似距離を平滑化し、前回計測された擬似距離と今回計測された擬似距離の差分と、今回計測された擬似距離変化率との差異が、所定値より小さいかまたは該所定値と等しい場合、信号処理手段により前回計測された擬似距離、今回計測された擬似距離および今回計測された擬似距離変化率から重み係数を求め、その重み係数に応じた今回計測された擬似距離と今回計測された擬似距離変化率の重み加算を用いた平滑化を実施する平滑化手段と、
平滑化手段により平滑化された擬似距離と衛星位置特定手段により特定されたGPS衛星の位置から現在位置を測位する。
(もっと読む)
無線装置
【課題】精度の高い位置情報を取得可能な無線装置を提供する。
【解決手段】車両CA1に搭載された無線装置10は、車両CA2に搭載された無線装置10と共通して受信できるGPS信号を送信するGSP衛星R1,R3〜R6から受信したGPS信号に基づいて、車両CA1とGSP衛星R1,R3〜R6との擬似距離P1を演算し、車両CA2とGSP衛星R1,R3〜R6との擬似距離P2を車両CA2に搭載された無線装置10から受信する。また、車両CA1に搭載された無線装置10は、擬似距離P1と擬似距離P2との差である擬似距離差を演算し、車両CA1と車両CA2との高度差を3次元電子地図を用いて検出する。そして、車両CA1に搭載された無線装置10は、擬似距離差と、高度差とに基づいて、車両CA1と車両CA2との相対位置を演算する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法機能とGPS等の測位手段とを併用して、移動経路上の複数地点の測位を行う場合に、最終的に正確な各地点の位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 現在位置の測位が可能な測位手段と、自律航法用センサの計測データによって移動経路の位置情報を算出する自律航法機能とを備えた測位装置において、移動経路上の第2基準地点Bについて、自律航法機能により算出された位置情報が表わす位置B1と、測位手段の測位結果が表わす位置Bとの差を表わすベクトルVbに基づき、該ベクトルVbを第1基準地点Aからの移動距離に応じた係数で乗じた補正ベクトルVxを、自律航法機能により算出された移動軌跡(T1)に加算して補正後の位置情報(T2)を取得する。
(もっと読む)
SPS受信装置およびその省電力制御方法
【課題】SPS信号を受信できない環境において実行される測位時に、電流消費量を低減させることで、長時間動作が可能なSPS受信装置を提供する。
【解決手段】SPS信号を受信し測位を行うSPS受信装置であって、SPS信号の受信状況に関する衛星取得情報を生成するSPS受信部2と、SPS受信部2により生成された衛星取得情報に基づいて、SPS受信部2を省電力で動作させるか否かを判定する省電力制御判定部32と、省電力制御判定部32により省電力で動作させると判定された場合、SPS信号に基づくSPS受信装置の測位時に、SPS受信部2の動作電流を低減させる設定を行う制御設定部33と、を備える。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
測位システム及び制御方法
【課題】移動局のビーコン送信機12の測位において、各地点の電界強度を事前に実測すること及びビーコン受信機11−ビーコン送信機12間の距離を計算することを省略し、かつビーコン受信機11の配備数を少なくする。
【解決手段】ビーコン送信機12は、ID情報付きビーコンを周囲へ発射する。複数のビーコン受信機11は、測位空間19内にほぼ等密度で分布して配備され、受信したビーコンの電界強度を測定する。基地局15では、各ビーコン受信機11からのビーコン情報を受信し(S51)、ビーコン受信位置情報テーブルを参照して、ビーコン情報送信元のビーコン受信機11の位置を求める(S52)。さらに、ビーコン受信機11の各位置と同一IDのビーコンについての各ビーコン受信機11における電界強度の比とに基づきビーコン送信機12の現在位置を算出する(S53)。
(もっと読む)
181 - 200 / 820
[ Back to top ]