
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
1,801 - 1,820 / 2,290
視力測定システム,情報処理装置,遠隔操作装置,情報処理方法,遠隔操作方法およびコンピュータプログラム
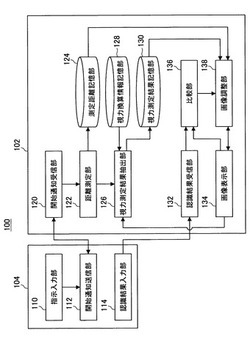
【課題】 空間的制約のある場所においても,簡易な方法で視力を測定する。
【解決手段】 遠隔操作装置104を操作するユーザの視力を測定する情報処理装置102に,装置間距離を測定する距離測定部122と;装置間距離,視力測定の視標として表示される視力検査画像の大きさ,および視力測定結果の対応関係を示した視力換算情報記憶部128と;所定の大きさの視力検査画像を表示する画像表示部134と;遠隔操作装置を介して入力された視力検査画像の認識結果と,表示された視力検査画像とを比較する比較部136と;比較部の比較結果に応じて,画像表示部に表示された視力検査画像の大きさを調整する画像調整部138と;距離測定部により測定された装置間距離と,画像表示部に表示された視力検査画像の大きさとに対応する視力測定結果を,視力換算情報記憶部から抽出する視力測定結果抽出部126と;を備える。
(もっと読む)
投受波装置及び測距装置

【課題】 本発明の課題は、設計に合致した安定した電磁波の送受波を容易に実現することが可能な投受波装置を提供する。
【解決手段】 投光部2から出射された光を第一反射面4aで反射して被測定物に照射すると共に、被測定物で反射して戻ってきた光を第二反射面4bで反射して受波手段へ導くように構成された投受波装置1であって、第一反射面4aと前記第二反射面4bとを、単一の反射部材4の表面に形成した。
(もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記打撃位置から上記弾道の所定位置までの計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第一のミリ波レーダ装置1と、上記停止位置の計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第二のミリ波レーダ装置2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出する演算部とを有している。第一のミリ波レーダ装置1と第二のミリ波レーダ装置2とは互いに異なる位置に設置されている。
(もっと読む)
人体検知装置及び制御装置
【課題】一つのセンサで人体の位置及び状態を検知することができる人体検知装置を提供する。
【解決手段】人体との距離に応じたレベルの信号を出力するセンサ11と、センサ11の出力信号を、センサ11から所定の距離の第1の位置における人体の動きに応じた所定レベルの信号と比較することによって、前記第1の位置における人体の動きを検知する進退検知部3と、センサ11の出力信号を、第1の位置よりもセンサ11に近い第2の位置における人体の動きに応じた所定レベルの信号と比較することによって、人体が第2の位置に存在するか否かを検知する着座検知部2とを備え、進退検知部3は、人体が前記第1の位置より遠くから第1の位置を通過してセンサ11に近づくことを検知し、着座検知部2が人体の第2の位置への到達を検知したのち、人体の第2の位置からの離隔を検知した場合に、人体が第1の位置を越えてセンサ11から遠ざかることを検知する。
(もっと読む)
距離測定装置
【課題】アクチュエータの負荷を重くせずに検知エリアを拡大することのできる距離測定装置を提供する。
【解決手段】距離測定装置は、投光レンズ1の後方の焦点位置に探査波の走査方向に沿って配置したLD1〜LD3を備えている。投光レンズ1は左右に移動可能であって、LD1、LD2、LD3は、それぞれ、検知エリア1、検知エリア2、検知エリア3に対して探査波を送信する。LD1、LD2、LD3は、検知エリア1と検知エリア2の一部が重なり、検知エリア3と検知エリア2の一部が重なるように配置される。投光レンズ1は、LD1の探査波が検知エリア1にのみ送波され、LD2の探査波が検知エリア3にのみ送波され、LD4の探査波が検知エリア4にのみ送波される長さだけ左右に移動する。
(もっと読む)
距離測定装置、及び距離測定方法
【課題】 定在波を利用した距離測定装置と同様に、「単純な構成」、「近距離測定が可能」、「測定誤差が小さい」という特徴を備え、かつドップラー効果による影響を実用上受けない距離測定装置及び距離測定方法を提供する。
【解決手段】 特定の帯域幅内において異なった複数の周波数成分を有する信号を出力する信号源1と、信号を波動として送信する送信部2と、送信された進行波VTと進行波VTが前記測定対象物6によって反射された反射波VRkとの混合波VCを検出する混合波検出部3と、検出された混合波VCの周波数成分を分析する周波数成分分析部4と、分析されたデータをスペクトル解析することによって距離スペクトルを求め、測定対象物6までの距離を演算する距離演算部5とからなる。
(もっと読む)
埋設物測定装置及び埋設物測定方法
【課題】 埋設された埋設物の被り厚を精度よく測定することができる埋設物測定装置及び埋設物測定方法を提供する。
【解決手段】 埋設物測定装置1はRFタグ2とリーダ3との間で電波の送受信を行う電波送受信部4と、RFタグ2からリーダ3までの距離を算出する算出部5と、埋設物の被り厚Dを演算する演算部6とを備えている。このような埋設物測定装置1において、コンクリート7に埋設された鉄筋8の被り厚Dを測定する場合には、まずコンクリート7の表面にリーダ3を配置する。次にリーダ3と、鉄筋8の表面に距離Lだけ離間して取り付けられたRFタグ2A,2Bとの間で電波を送受信して電波強度P,Qを取得する。続いて、データベース10に格納されたデータに基づいて距離X,Yを電波強度P,Qより算出する。そして、これらの距離X,Yと予め設定された距離Lとから被り厚Dを幾何学的に演算する。
(もっと読む)
停止車両判別装置、自動車及び停止車両判別方法
【課題】高分解能のレーザレーダを用いなくても、自車両前方の物体が停止車両であるか否かを、精度良く判別することができる停止車両判別装置、それを備えた自動車及び停止車両判別方法を提供する。
【解決手段】自車両と自車両前方の停止物との距離Py_z0[i]に基づいて、停止車両判別閾値を設定し、その停止物の横幅objW_z0[i]と停止車両判別閾値とを比較することで、当該停止物が車両であるか否かを判別する。このとき、停止車両判別閾値として上限閾値Th_Width2[i]と下限閾値Th_Width1[i]とを設け、自車両と停止物との距離が遠ざかるほど前記上限閾値を大きく、前記下限閾値を小さくする。
(もっと読む)
FM−CWレーダ装置
【課題】雑音等が存在するターゲットの信号が発生した場合でも、レーダに現れた信号が目標物体からの信号か、それ以外の雑音かを識別する、FM−CWレーダ装置を提供する。
【解決手段】電圧制御発振器に変調信号発生器から変調用信号を加えてFM変調し、FM変調波を時分割ON−OFF制御により送信し、反射波を時分割ON−OFF制御により受信するFM−CWレーダ装置において、ON−OFF制御を行う周波数を変化させる手段、及び該周波数の変化に応じて変化する信号成分を識別する手段を設け、目標物体からの信号を他の信号から識別する。
(もっと読む)
送受信システム,外部発信受信装置,および送受信方法
【課題】無線型伝送装置の存在位置を検知する。
【解決手段】外部発信受信装置10と無線型伝送装置20との間において、情報がやりとりされる。外部発信受信装置10は、搬送波の送信レベルを順次変更する。無線型伝送装置20は、搬送波を受信して駆動し、搬送波を負荷変調して返信信号を送信する。外部発信受信装置10は、無線型伝送装置20からの返信があると、搬送波の送信レベルに基づいて外部発信受信装置10と無線型伝送装置20との間の通信距離を求める。
(もっと読む)
距離測定装置
【課題】 簡便で高精度な距離測定を実現する。
【解決手段】 電圧制御発信器8の出力信号は変調信号9として発光素子を駆動するとともに位相比較器11に入力され、かつ出力信号14として外部に出力される。受光素子で検出された信号は受信信号10として位相比較器11の他方の入力に接続される。 位相比較器11は二つの入力位相を比較し位相差に対応した位相信号14を出力する。位相信号14はループフィルタ15に入力され周波数制御信号13に変換されて電圧制御発信器8の周波数制御入力に接続される。 変調信号9と受信信号10の位相差が一定になるように電圧制御発信器8の発信周波数が制御される。
(もっと読む)
車載用ナビゲーション装置
【課題】平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】地図データを格納した手段と、自車位置を検出する手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信し、発信信号に対する対象物からの反射信号を受信したときに当該対象物までの距離を検出する手段とを備えた車載用ナビゲーション装置において、検出された自車位置と地図データを参照して(S1)、検出された当該対象物までの距離を指示する信号の強度の変化に応じて(S2,S3,S6)、自車の走行状態を検知する(S4,S7,S8)。
(もっと読む)
FM−CWレーダ装置
【課題】目標物体ではない遠距離の物体からの反射波の信号を区別し、目標物体から除外できる、FM−CWレーダ装置を提供する。
【解決手段】電圧制御発振器に変調信号発生器から変調用信号を加えてFM変調してFM変調波を送信し、反射波を受信するFM−CWレーダ装置において、前記周波数変調の変化の直線性を非直線性とする手段、及び受信した信号の周波数分布を識別する手段を備え、識別された周波数分布に基づいて目標物体を識別する。
(もっと読む)
レーダー装置カバー及びその製造方法
【課題】ベースコート塗膜層の欠陥に起因するIn光輝膜層の肌荒れ外観不良をなくすことができるとともに、ベースコート塗膜層がなくても、おさえ塗膜層の塗料溶剤に起因するIn光輝膜層の肌荒れ外観不良を防ぐことができるレーダー装置カバーを提供する。
【解決手段】レーダー装置カバー10は、板状の樹脂基材11と、樹脂基材51の上にベースコート塗膜層を介さずに物理蒸着法により成膜された膜厚10〜100nmのInよりなる光輝性及びレーダー波透過性のIn光輝膜層12と、In光輝膜層12の上若しくは上下に物理蒸着法により成膜された金属化合物よりなる所定膜厚(上が10〜200nm、下が3〜100nm)の金属化合物膜層13、13’と、金属化合物膜層13の上に塗布形成されたおさえ塗膜層14と、おさえ塗膜層14の上に射出成形により設けられた樹脂背後材15とから構成されている。
(もっと読む)
FM−CWレーダ装置
【課題】雑音等が存在するターゲットの信号が発生した場合でも、レーダに現れた信号が目標物体からの信号か、それ以外の雑音かを識別する、ヘテロダイン式FM−CWレーダ装置を提供する。
【解決手段】電圧制御発振器に変調信号発生器から変調用信号を加えてFM変調してFM変調波を送信し、反射波を受信するヘテロダイン式FM−CWレーダ装置において、ダウンコンバート用信号(IF信号)の周波数を変化させる手段,及び該IF信号の周波数を変化させたとき該周波数の変化に応じて変化する信号を識別する手段を設け、目標物体からの信号を他の信号から識別できるようにする。
(もっと読む)
測距装置、及び測距方法
【課題】 測距精度を向上することができる測距装置及び測距方法を提供する。
【解決手段】 所定の周期でパルスを有する無線信号を送信する送信部2と、送信部2から送信された直接波8及び対象物により反射された反射波9を受信する受信部3と、受信部3で直接波8が受信されてから反射波9が受信されるまでの時間である到達時間差を計時する時間差取得部46と、時間差取得部46により計時された到達時間差に基づいて、測距装置1から測距対象物10までの距離を算出する距離算出部47とを備えた。
(もっと読む)
自動車両のレーダ方法および自動車両用のレーダ装置
【解決手段】自動車両のレーダ装置(10)がレーダ波を放射して受信し、物体(16)と自動車両との距離が、発信されたレーダ波と受信されたレーダ波との間の周波数シフトから確定され、物体の速度が、受信されたレーダ波の位相位置から確定される、FMCWのレーダ方法が示される。方法は、この方法が、第1の時間区間(T_A、T_B)で、自動車両の周囲(36)の少なくとも1つの第1の部分区域(A,B)にある物体に対して実行され、第2の時間区間(T_C、T_D、T_E、T_F、T_G)で、周囲(36)の少なくとも1つの第2の部分区域(C、
D、E、F、G)にある物体に関して速度ではなく、距離が確定されることを特徴とする。
(もっと読む)
電波送受信器における電波干渉回避装置
【課題】 演算部を含む電波送受信器における電波干渉回避装置であって、発振周期の乱れによる影響を該演算部に極力を与えないようにして、干渉波の発振タイミングに対して自己の発振タイミングをずらし、干渉を回避する。
【解決手段】 干渉波による干渉の発生を検出する手段10によってその干渉を検出したときのみ、一周期の長さを変更し、自己の発振タイミングを干渉波の発振タイミングに対して相対的にずらすタイミング制御手段20を備える。
(もっと読む)
距離測定装置
【課題】 距離分解能の1倍程度まで計測距離が近くなっても、高い精度にて測定を実行したい。
【解決手段】 制御部58は、測定モードと保持モードのいずれかを選択する。送信部14は、測定モードにおいて、時間の経過とともに周波数が変動する信号を生成し、生成した信号を送信する。受信部16は、ターゲットによって反射された信号を受信する。第4ミキサ44等は、受信した信号に対して、現タイミングにおいて送信部14によって生成される信号によって、直交検波を実行する。処理部56は、直交検波した信号に対して、予め保持した信号による補正を実行し、補正した信号に含まれた周波数成分をもとにターゲットまでの距離を特定する。送信部14は、保持モードにおいて、時間の経過とともに周波数が変動する信号を生成しつつも、生成した信号の送信を中止する。処理部56は、直交検波した信号を保持する。
(もっと読む)
物体姿勢検出システム及びこれを備えた移動体並びに無線タグラベル及び無線タグ情報読み取り装置
【課題】物体の姿勢を検出することができる物体姿勢検出システム及びこれを備えた移動体並びに無線タグラベル及び無線タグ情報読み取り装置を提供する。
【解決手段】検出対象の荷物4〜7と、この荷物4〜7に所定の配置で複数設けた無線タグ回路素子Toと、これら複数の無線タグ回路素子Toと無線通信を行うRF通信制御部140及びアンテナ101−1〜4と、このRF通信制御部140及びアンテナ101−1〜4による通信結果に基づき、荷物4〜7の姿勢を検出する制御装置103のCPU121とを有する。
(もっと読む)
1,801 - 1,820 / 2,290
[ Back to top ]