
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
41 - 60 / 1,238
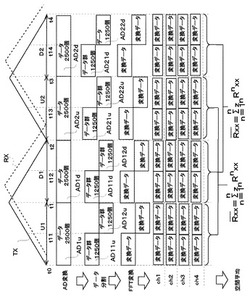
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
距離,速度測定装置

【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
船舶用航行支援装置
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】現スキャンで得られたデータに、過去のスキャン結果に基づいて推定したデータを正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部、加算部及び抽出部を具備する。パルス圧縮部は、無線部で受信したパルス信号にパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータにドップラフィルタ処理を施すことで、周波数ビン毎のレンジセルデータを生成する。信号処理部は、レンジセルデータを固有データに変換する。予測部は、前回のスキャン結果に基づき所定の範囲に目標が位置すると予測する予測データを作成する。加算部は、予測データと、次スキャン時に取得される固有データとを、同一の位置同士で足し合わせる。抽出部は、足し合わせたデータのうち、強度が最大の位置のデータを抽出する。
(もっと読む)
ターゲット識別システム
【課題】簡易な構成でありながら正確にターゲットである例えば人の移動軌跡を追跡するなどのターゲット識別をすることができるターゲット識別システムを提供すること。
【解決手段】送信アンテナTAの各素子アンテナから、互いに直交する信号を送信し、ターゲットで反射して帰ってくる信号を受信アンテナRAで受信して、整合フィルタによって、互いに直交する信号を分離することによって空間バーチャルアレーSVAを構成し、異なる時間に得られる信号について、ターゲットの移動に伴う位相ズレを補償することによって仮想的に位置がズレている素子アンテナの信号として得ることによって時間バーチャルアレーTVAを構成する。これによって、実質的に素子アンテナの数を増やし、開口長を拡大することができる。
(もっと読む)
信号トランスポンダ
【課題】高精度で信号の周波数範囲を変換し、遠隔信号キャラクタリゼーションに適用可能なトランスポンダを提供することである。
【解決手段】本発明は、未知の信号源からの信号の周波数変換のための信号トランスポンダであって、未知の信号源から信号を受信するための入力手段と、受信した信号をフィルタリングするための入力フィルタと、受信した信号を増幅するための入力信号増幅器と、増幅されフィルタリングされた、受信した信号の周波数を、所定の周波数に変換するためのミキサと、周波数変換のために、ミキサに供給されるクロック信号を発生させるための局部発振器と、周波数変換された信号をフィルタリングするための出力フィルタと、周波数変換された信号を増幅するための出力信号増幅器と、フィルタリングされ増幅された、周波数変換された信号を送信するための出力手段とを備える、トランスポンダを提供する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム
【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
レーダ装置及び干渉波除去方法
【課題】干渉波による影響を除去してパルス圧縮時のサイドローブを低減する。
【解決手段】IQ検波部171は、受信信号を直交検波してIQデータを求める。干渉波除去部172は、IQデータから干渉波の影響を除去する。干渉波除去処理では、同一ヒットでの対象レンジ目の電力値を周囲のレンジ目の電力値に基づいて補正し、同一ヒット間で位相変化が保たれるようにデータ補正が行なわれる。パルス圧縮部173は、位相変調または周波数変調が施された送信パルスの受信信号において、その復調を施す際に変調送信波との自己相関をとることによって送信パルスより幅の短いパルスに変換する処理を行う。このとき、干渉波除去処理において位相状態が保持されているので、パルス圧縮後の出力にサイドローブが発生することを抑制することができる。
(もっと読む)
遠隔ガス流速計測方法及び遠隔ガス流速計測装置
【課題】ダストが多い悪環境においても、ダストによる波動の減衰の影響を受け難く遠隔の所定位置のガス流速を、比較的簡単な機器構成で高精度に計測できるようにする。
【解決手段】いわゆるマイクロ波或いはミリ波と呼ばれる電磁波を波動として用いており、その波長はmm〜cmオーダであるため、通常の直径が約0.1〜1mm程度のダスト粒子が多い雰囲気では、若干の散乱波が生ずると同時にそれらの電磁波の透過性が確保されるので、送信アンテナ23及び受信アンテナ24から比較的離れた遠隔の場所でもガス流速の計測が可能となり、さらに、電磁波を擬似ノイズで変調した電磁波を送信し、受信された散乱波を擬似ノイズで相関処理を施して検出するため、微弱な散乱波を高感度或いは高ノイズ抑制性能をもって検出できるので、送信アンテナ23及び受信アンテナ24から遠隔な場所の微弱な散乱波を検出し、ガス流速の計測が可能となるようにした。
(もっと読む)
探知測距装置および探知測距方法
【課題】センサアレーを用いて到来方向推定を行い、さらに複数の送信センサを用いて実効開口を拡大する探知測距装置において、スイッチの切り替えによる時分割処理の弊害をなくし、高精度の測定を可能とする。
【解決手段】変調器161,162において互いに直交する符号を用いて送信波を拡散し、送信用センサAT1,AT2から放射する。受信用センサAR1〜ARNで受信された信号のそれぞれを分岐器241,242で2分岐し、そのそれぞれについて復調器2611〜262Nにおいて送信側で用いた符号と同じ符号により逆拡散する。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
障害物検知装置及びコンピュータプログラム
【課題】障害物検知装置1101において、障害物の誤検知を抑制する。
【解決手段】電波を送信する送信アンテナ1001と、前記送信された電波が障害物により反射された電波を受信する受信アンテナ1002と、前記受信された電波に基づいて障害物を検知する障害物検知部311と、前記検知された障害物について、あらかじめ設定された誤検知の特徴の有無を判定する誤検知判定部1011と、画像を撮像するカメラ302と、前記誤検知の特徴があることが判定された障害物について、前記カメラ302により撮像された画像に基づいて、当該障害物の有無を判定する障害物有無判定部1012と、を備える。
(もっと読む)
追尾情報管理装置、追尾情報管理システム及びレーダ装置
【課題】異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
信号生成回路、レーダー装置
【課題】低雑音で高周波数精度かつ高線形なFMCW信号を得ることのできる信号生成回路、レーダー装置を提供する。
【解決手段】アナログ制御信号により発振信号の周波数が制御される発振器を有している信号生成回路は、発振信号の位相情報を検出してディジタルの位相情報を出力するディジタル位相検出部と、ディジタルの位相情報を微分してディジタルの周波数情報を出力する第1の微分部と、発振周波数を設定する周波数設定コードとディジタルの周波数情報とを比較してディジタルの周波数誤差情報を出力する比較部と、ディジタルの周波数誤差情報の高周波成分を除去するローパスフィルタ部とを備えている。さらに、高周波成分が除去されたディジタルの周波数誤差情報をアナログの周波数誤差情報に変換するD/A変換部と、アナログの周波数誤差情報を積分してアナログの位相誤差情報に変換しアナログ制御信号として出力する積分器とを備えている。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
41 - 60 / 1,238
[ Back to top ]