
Fターム[5J070AE02]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 船舶 (172)
Fターム[5J070AE02]に分類される特許
21 - 40 / 172
探知装置、レーダ装置、探知方法、および探知プログラム
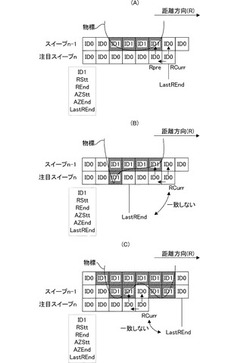
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
レーダ装置及び物標検出方法

【課題】アンテナを回転して送信ビームを放射するレーダ装置及び物標検出方法において、各方位における送受信に要する時間を長くすることなく、クラッタなどからの物標の受信信号成分の分離を行ない易くすることである。
【解決手段】アンテナ20は、回転軸24の周りを回転しつつ各方位において、1パルスの送信ビーム25を放射して反射体からの反射エコーを受信する。仰俯角方向走査部30は、1パルスの送信ビーム25を、仰俯角に応じて周波数が異なるように、方位毎に仰俯角方向に走査する。受信部60は、周波数成分検出部62によって、アンテナ20で受信した受信信号の周波数成分から反射体の仰俯角を検出する。同時に、受信部60は、振幅成分検出部61によって、受信信号の時間成分から反射体の距離を検出する。
(もっと読む)
測位方法
【課題】パルスが周期的に出現する場合を想定して、測角値の残差に加えてPRI情報(パルス送信周期)を併用することにより、グルーピングおよび測位精度を向上させた測位方法を得る。
【解決手段】移動プラットホームPから、発信源を有する複数のターゲットT1、T2に関する測角値θ(tk)(k=1、2、・・・、K)を、各発信源にグルーピングして測位するために、発信源からの各パルスに基づく測角値θ(tk)と、各パルスの送信周期に相当するPRI情報とを併用したグルーピングを用いることを特徴とした測位方法である。
(もっと読む)
航跡表示装置
【課題】 この発明は、遅延決定型の航跡決定方式において、過去および最新の航跡決定における誤りを是正することができ、オペレータの意思決定に必要な航跡情報をより正確に表示することができる航跡表示装置を提供する。
【解決手段】 航跡判定部110は前回抽出航跡を保管しており、今回抽出航跡が前回と異なる観測値から構成されている場合、航跡表示情報生成部140は前回抽出された航跡から生成された航跡のうち最高尤度を持つ航跡と今回航跡による尤度差比較を行い、比較結果に応じて航跡の表示形態を決定する。
(もっと読む)
画像識別装置および検出装置
【課題】
目標の両端部分の一部が欠落している時系列画像であっても、目標の識別及び検出を自動で行う装置を提供する。
【解決手段】
目標からのレーダエコーを処理してフレーム単位で生成される時系列画像を用いて前記目標の識別を行う画像識別装置であって、レーダエコーを処理して生成される画像を取得する取得部と、
前記画像に含まれる輝度値の変化率から算出される主軸を用いて前記目標の両端候補を抽出する抽出部と、前記画像と前記両端候補を用いて、予め保持している辞書との類似度を算出する算出部と、前記両端候補毎に得られる前記類似度から目標の識別を行う識別部と、前記識別部の結果を出力する出力部とを具備する。
(もっと読む)
目標物検出画像生成装置、目標物検出装置、クラッタ画像生成装置、目標物検出画像生成プログラム、目標物検出プログラム、クラッタ画像生成プログラム、目標物検出画像生成装置の目標物検出画像生成方法、目標物検出装置の目標物検出方法およびクラッタ画像生成装置のクラッタ画像生成方法
【課題】目標物だけを高い検出率で検出できるようにすることを目的とする。
【解決手段】レファレンスセル抽出部110は、レーダ画像191からターゲットセル101aを選択し、レーダ画像191からレファレンスセル101bを抽出する。画素平均値算出部120はレファレンスセル101bの画素平均値102を算出する。画素標準偏差算出部130はレファレンスセル101bの画素標準偏差103を算出する。標準偏差補正値算出部140は画素平均値102と画素標準偏差103との差を標準偏差補正値104として算出し、目標物検出画像生成部141は標準偏差補正値104をターゲットセル101aに対応する目標物検出画像194の画素領域に設定する。目標物検出部150は、目標物検出画像194から検出閾値より大きい画素領域を目標物領域として特定し、特定した目標物領域に対応する座標値を目標物座標値195として算出する。
(もっと読む)
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
(もっと読む)
移動体特定装置、移動体特定プログラム及び移動体特定方法
【課題】SAR画像データに含まれる移動体と、送信情報を送信した移動体とを高精度に対応付けすることを目的とする。
【解決手段】画像情報計算部2は、SAR画像から、前記SAR画像に含まれる移動体の速度を計算し、計算した速度に基づきその移動体の位置を計算する。補完情報特定部3は、移動体から送信された送信情報から、前記SAR画像が撮像された際のその移動体の位置を特定する。そして、相関度計算部4は、画像情報計算部2が計算した位置と、補完情報特定部3が特定した位置との相関度を計算し、対応付部5は、相関度計算部4が計算した相関度に基づき、SAR画像に含まれる移動体と送信情報を送信した移動体とを対応付ける。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
干渉除去装置、信号処理装置、レーダ装置、干渉除去方法およびプログラム
【課題】干渉信号を正確に除去することを可能とする。
【課題手段】複数の複素受信信号を記憶するメモリ331と、複数の複素受信信号から干渉信号を検出する検出器333と、複数の複素受信信号に基づいて干渉信号を含む複素受信信号の物標信号成分を算出する算出器3341、および、当該複素受信信号を物標信号成分に置き換える置換器3342を有する推定器334とを備え、算出器3341は、複数の複素受信信号の振幅に基づいて物標信号成分の振幅を決定する振幅決定器33411と、複数の複素受信信号の位相に基づいて物標信号成分の位相を決定する位相決定器33412とを有する。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。干渉検出部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
画像処理装置及び監視システム及び画像処理方法及び画像処理プログラム
【課題】合成開口レーダの観測信号を迅速に画像化する。
【解決手段】画像処理装置200は、例えば地上局110a等、地上の1つの地点や、例えば海上保安船110b等、海上を移動する船舶に搭載される。それぞれの画像処理装置200にて、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
(もっと読む)
21 - 40 / 172
[ Back to top ]