
Fターム[5J070AE02]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 船舶 (172)
Fターム[5J070AE02]に分類される特許
121 - 140 / 172
逆合成開口レ−ダ装置

【課題】 従来の逆合成開口レ−ダ(ISAR)装置は、オペレ−タの選択した目標のISAR画像に対し、予め登録された複数の目標候補の特徴を収めた目標デ−タを元にして多数求めた疑似ISAR画像(参照画像)を逐一照合し、照合率の高い参照画像に対応する候補を選択するため、目標の識別を再現性良く実施できなかった。
【解決手段】 任意のタイミングで検出される目標のISAR画像のレンジ成分の画像幅と同じ画像幅をもつ疑似ISAR画像を、予め登録された目標デ−タから順次算出し、前記ISAR画像と順次照合させ、照合率の高い疑似ISAR画像に対応する候補を選択することで、目標の識別を再現性良く実施できるようにした。
(もっと読む)
目標表示装置及び目標表示方法

【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
リソース管理装置及びそのためのプログラム
【課題】入札処理が時間制約の範囲内で完了するようにリソースの割り当て行なうリソース管理装置を提供する。
【解決手段】リソース管理装置101は、複数のアプリケーションプログラムのそれぞれに対応して設けられ、複数のアプリケーションプログラムのそれぞれが所定の単位時間内に消費または供給するリソースについて、入札値を計算して入札値の情報を生成する複数のリソース応札部102と、複数のリソース応札部102からの入札値の情報に基づいて、所定の単位時間における、複数のアプリケーションプログラムのそれぞれに割り当てるリソースを決定するリソース割り当て処理を行なう入札管理部103と、所定の単位時間において、入札打ち切り条件が満たされるまでリソース割り当て処理が繰り返されるように入札管理部103を管理する繰り返し管理部107とを有する。
(もっと読む)
電子支援計測システムにおける方法、当該方法の使用および装置
本発明は電子計測システム/方向探知装置(ESM1)によって検出される複数の見かけの放射源により放射される信号を処理する方法及び装置に関するものである。前記装置は、見かけの放射源の各々の放射源特徴パラメータの分散に基づいて、前記見かけの放射源の中の真の放射源(21;31;41)および少なくとも1つの偽の放射源を識別するのに適している。偽のおよび真の放射源が識別されると、この情報は偽の放射源による混乱の抑制するためおよび/または1台のESM/DF装置のみによる観測値を使用して真の放射源の位置を決定するために用いられ得る。 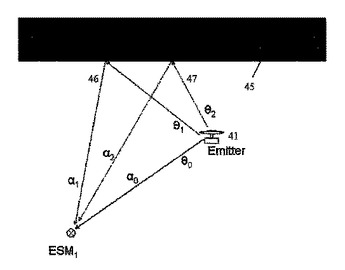 (もっと読む)
(もっと読む)
回転式航空機搭載レーダーを用いて、船の探知と、汚染物質油膜のレーダーマッピングとを同時に行うための方法
本発明は、海洋監視の分野に、および、汚染物質の漂流している油膜の探知に関する。本発明による方法は、次の2つの別個の処理モードを実装するために、回転アンテナパルスレーダーを使用する。−レーダーが、走査される空間の領域内に位置している物体(11)の探知、位置付け、および軌跡解析を実行する、1つの従来の動作モード。−レーダーが、航空機の前進方向に対して側方に伸びている、表面の2つのバンド(12)をマッピングし、一方、走査された領域の高分解能画像を生成する、マッピングタイプの動作モード。2つの動作モードは、アンテナの各回転における、異なる角度セクタに対して実装される。本発明は、特に、海洋および沿岸パトロール任務を担当する、レーダーシステムを装備した航空機に適用される。 (もっと読む)
相手船動静監視装置
【課題】 Bスコープ座標で示される相手船妨害ゾーンの映像と平面座標で示されるレーダ映像との関係が容易に理解できるようにする。
【解決手段】
相手船妨害ゾーンを示す船舶航行支援装置の表示画面1とレーダ装置の表示画面9とは近接して配置される。それらの画面1,9は、VRMとEBLとにより相互に連動するようにされている。
(もっと読む)
情報表示装置及び情報表示システム
【課題】表示対象物の識別を的確に行うことができ、さらにその識別に要するユーザの負荷を低減することができる情報表示装置を提供する。
【解決手段】表示対象物の動作状況を規定する情報を入力する入力部と、表示対象物のシンボルの形状中の部分に動作状況を規定する情報を割り当て、表示対象物の動作状況の変化に応じてシンボルの対応する部分の寸法を変更する処理部とを備える。
(もっと読む)
画像レーダ装置
【課題】目標の3次元形状を高精度に取得可能な画像レーダ装置を得る。
【解決手段】送信電波W1を照射する電波照射手段4と、目標Tからの受信電波W2に基づき目標T上の反射点の3次元分布を投影面に投影した画像を生成するレーダ画像再生部6と、反射点像を抽出する反射点抽出部8と、反射点像の対応付けを取る画像間反射点対応部9と、対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各反射点の画像におけるレンジ軸方向およびクロスレンジ軸方向の位置とに基づいて各反射点の3次元位置を推定する目標形状算出部14とを備えている。
(もっと読む)
レーダ装置
【課題】クロスレンジ方向にドップラ成分がなくても、目標の形状を認識できるレーダ装置を提供する。
【解決手段】送信波に対する反射波を受信する受信器5と、受信器からの信号をパルス圧縮して得られた高距離分解能の信号を離散フーリエ変換により積分するDFT部62と、DFT部からの信号から目標を検出して目標信号として出力する検出部63と、検出部からの目標信号に基づき目標をレンジ毎に測角する測角部64と、測角部で測角することにより得られた各レンジの測角値により決定されるクロスレンジ方向の目標位置を記憶するメモリ65と、M回(Mは正の整数)の観測回数の各々においてメモリに記憶されたM組の各レンジの目標位置を加算または論理和演算し、目標の形状を得る加算部66を備えている。
(もっと読む)
レーダー検出しきい値を生成するシステムおよび方法
【課題】レーダー検出しきい値を生成するシステムおよび方法を提供する。
【解決手段】レーダー検出しきい値を生成する方法は、周波数領域信号の周波数領域値に関連する第1の複数のパーセンタイル値を計算することを含む。第1の複数のパーセンタイル値は、検出しきい値を生成するのに使用される。レーダー検出しきい値を生成する装置は、周波数領域信号の周波数領域値に関連する第1の複数のパーセンタイル値を計算するようになっている第1パーセンタイルプロセッサを含む。しきい値プロセッサは、複数のパーセンタイル値を使用して検出しきい値を生成するようになっている。
(もっと読む)
入港船舶の許可不許可判別システム
【課題】水上において所定領域内への船舶の入港を管理することができる。
【解決手段】入港船舶の許可不許可判別システムは、船舶1に取り付けられ該船舶1の許可情報を送信するIDタグ2と、船舶1が入港するときに通過する所定の検知領域G内で船舶1を検知するための船舶検知手段11と、IDタグ2からの許可情報を受信する許可情報受信手段12と、受信した許可情報に基づき船舶1の入港を許可するか許可しないかの判別を行なう許可不許可判別手段53とを有する。また、船舶検知手段11の出力により船舶1が入港を検知し、入港許可船舶ではないと判断された時に船舶1に対して警告を行う警告手段13を備える。
(もっと読む)
合成開口レーダー
【解決手段】 合成開口レーダーを低PRFモードで動作させる方法は、レーダー・パルスのストリームを生成し、ストリームにパルス繰り返し周波数(PRF)の所定の調整を施し、ストリームを目標領域へと向け、受信したパルスを処理する、ことを具備し、受信したパルスを一連の組として分けることと組の受信したレーダー・パルスを重畳して中央の受信ローブを増強するとともにサイド・ローブを減衰させることを具備する。 (もっと読む)
合成開口レーダ画像による目標物識別方法及び装置
【課題】2次元SAR画像における倒れ込み現象による影響を除去し目標対象の識別精度を向上させる。また、目標の領域そのものを精度良く決定し識別精度を向上させる。
【解決手段】本発明の目標物識別装置は、SAR部161(合成開口レーダ部)と、レーダ反射信号をSAR部161から入力し2次元SAR画像を生成するSAR画像取得部162と、SAR画像の中から目標物を切り出す対象切り出し部163と、切り出された目標物の特徴量を計算する特徴計算部164と、モデルを記憶するモデル記憶部167と、目標物の特徴がモデルの特徴と合致するか否か識別する対象識別部165とを備える。対象識別部165は、飛翔体の飛翔方向及び目標物の姿勢に依存して目標物の2次元レーダ画像上に現れる変形(倒れ込み)を考慮し、反射強度分布をレーダ照射方向に射影して、目標物の特徴が、モデルの特徴と合致するか否か識別する。
(もっと読む)
レーダ画像処理装置、レーダ画像識別方法およびレーダ画像識別プログラム
【課題】 レーダ画像においてアジマス方向に大きさが変化する移動体を識別する。
【解決手段】 レーダ画像表示部110は被識別情報データベース192からレーダ画像データを取得し入出力端末191に画像を表示する。構造物指定処理部120は表示した画像に基づいて利用者が入出力端末191から指定したレーダ画像上の構造物の位置を取得する。構造物画像位置算出部130は指定された構造物の位置情報に基づいてレーダ画像上の構造物間の距離の絶対値を算出する。構造物相対位置算出部140は構造物間の距離の絶対値に基づいてISAR画像上の構造物間の相対距離を算出する。地物識別部150は既知地物情報データベース193から既知である地物が有する構造物間の相対距離を取得してレーダ画像上の地物が有する構造物間の相対距離と比較してレーダ画像上の地物を識別する。
(もっと読む)
位置特定装置、画像再生装置、位置特定方法および位置特定プログラム
【課題】 SAR(Synthetic Aperture Radar、合成開口レーダ)画像における移動する目標物の位置を算出することを目的とする。
【解決手段】 目標物のレンジ方向への移動速度であるレンジ方向速度を測定して記憶装置に記憶する速度測定部210と、速度測定部210が測定したレンジ方向速度に基づき、アジマス方向へのシフト量を算出して記憶装置に記憶するシフト量算出部220と、SARにより観測されたSAR再生画像を入力するSAR再生画像入力部222と、シフト量算出部220が算出したシフト量とSAR再生画像入力部222が入力したSAR再生画像の目標物の座標とに基づき、目標物の位置を特定して記憶装置に記憶する位置特定部224とを備える。
(もっと読む)
レーダ画像処理装置、構造物高さ算出方法、レーダ画像識別方法、構造物高さ算出プログラムおよびレーダ画像識別プログラム
【課題】 レーダ画像上の構造物の高さを算出する。また、レーダ画像上の地物を識別する。
【解決手段】 レーダ画像表示部110は観測情報データベース192からレーダ画像データを取得し入出力端末191に画像を表示する。下端線指定処理部120と上端点指定処理部130は表示した画像に基づいて利用者が入出力端末191から指定したレーダ画像上の構造物の下端と上端とを取得する。高さ登録処理部140は、まず、指定された構造物の下端と上端との間の画素数を算出し、画素数に1画素当りの長さを乗じて構造物の画像上の長さを算出する。そして、画像上の長さとレーダ観測時のレーダの高度などの観測情報とに基づいて構造物の実体の長さを算出する。地物識別部160は、既知地物情報データベース193から既知である地物の構造物の高さを取得してレーダ画像上の構造物の高さと比較して構造物を有するレーダ画像上の地物を識別する。
(もっと読む)
航跡生成システム、その誤差共分散行列初期値設定装置、航跡生成方法およびその誤差共分散行列初期値設定方法
【課題】誤差共分散行列初期値として適切な値を算出し設定することによって、航跡を生成した直後における航跡諸元の精度および安定性を向上させる。
【解決手段】所定状態および誤差共分散行列の初期値を設定してその後の状態および誤差共分散行列を推定するカルマンフィルタを用いたシステムにおける前記誤差共分散行列の初期値を設定する誤差共分散行列初期値設定装置10において、前記誤差共分散行列初期値を、時間が経過するとともにある観測値が入力されるだろうと想定して状態の誤差を適切な値へ収束させる誤差共分散行列初期値収束手段14を有する。
(もっと読む)
指向性電波を使用した個体通過監視装置
【課題】本発明による指向性電波を使用した個体通過監視装置は、同時に入る場合の不許可者の通過、通常で扉が開いている場合の不許可者の通過、通過路の範囲が広い場合の、検出したいエリアの外の通過体の信号も検出、監視カメラのみでは、個体の認識(許可・不許可の判断)は困難、以上のような従来品の不都合を回避した通過監視装置を提供することにある。
【解決手段】監視対象エリアに存在する監視対象体の有する認識符号のみを送受信可能とする指向性個体認識符号送受信器と、監視対象体が予め許可登録されたものであるか否かの判別をする許可不許可判別器と、ほぼ同じに監視対象エリア上に前記監視対象体が存在するか否かの判別をするか、又は/及び、監視対象エリア上に存在する監視対象体の個数を検出するかを行う個体検出センサーと、警報などの出力機器を制御する判別出力を行う制御器とを有することを特徴とする。
(もっと読む)
レーダ装置
【課題】 偏波情報を用いることで、SCRを改善し、目標検出確率を向上させる。
【解決手段】 クラッタのドップラー周波数帯域を算出するクラッタ帯域推定手段、受信ドップラースペクトルの中から上記ドップラー周波数帯域内に存在する信号を抽出するクラッタ帯域信号抽出手段、ドップラー周波数帯域内に存在する信号に基づいてクラッタの偏波特性を推定するクラッタ偏波特性推定手段、クラッタ抑圧フィルタを生成するクラッタ抑圧フィルタ生成手段、ドップラー周波数帯域内のドップラースペクトルに対して上記抑圧フィルタにより上記偏波特性相当成分を抑圧するクラッタ抑圧手段、抑圧されたドップラースペクトルを閾値と比較して目標の検出判定を行う目標検出手段。
(もっと読む)
画像レーダ装置
【課題】不要な距離変化を推定する際に、同じレンジに存在する複数の反射点間の干渉の影響で増大する補償量の推定誤差を低減する。
【解決手段】レンジヒストリから時系列データを抽出する時系列データ抽出手段201と、短時間フーリエ変換を適用してドップラヒストリを生成するドップラヒストリ生成手段202と、短時間ドップラヒストリを切り出すヒストリ切出し手段203と、短時間ドップラヒストリからドップラ周波数の変化率を推定するドップラ変化率推定手段204〜206と、ドップラ周波数の変化率に基づいて目標とレーダとの間のレンジの変化を推定するレンジ変化算出手段207と、レンジの変化に基づいて補償量を算出する補償量算出手段208と、補償量に基づいてレンジヒストリの不要なレンジおよび位相の変化を補償する運動補償器21とを有する2次元フーリエ変換補償回路20を備えるものである。
(もっと読む)
121 - 140 / 172
[ Back to top ]