
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
341 - 360 / 687
サーチボリュームの内容物を測定する方法および装置
サーチボリュームの内容物を測定する方法。この方法は、電磁波エネルギーをサーチボリューム内へ送る1以上の送信機を作動する工程、各々がサーチボリューム内の異なる伝搬経路(典型的には単静的又は双静的経路)に関連づけられる2以上の信号を記録することで、サーチボリュームが電磁波エネルギーの通過に与える影響を検出する工程、各々がサーチボリューム内の異なる伝搬経路(典型的には単静的又は双静的経路)に関連づけられるサーチボリューム内の所望のボクセル上に合成して集束される2以上の整列信号を生成するため信号を整列させる工程、整列信号を処理して2以上のデータ値を生成することで、整列信号におけるコヒーレンスの程度を示す品質係数を計算する工程、整列信号を総和して総和信号を生成する工程、及び総和信号を処理して所望のボクセル位置におけるサーチボリュームの内部構造を示し、品質係数に従って変動する出力を生成する工程を含む。  (もっと読む)
(もっと読む)
遠隔点状3次元電磁波照射システム
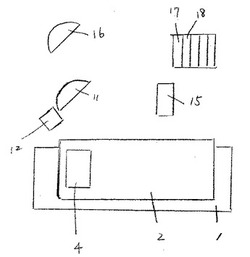
【課題】人間の脳内等の任意の小範囲に、非接触で、電磁波ビームの焦点を照射し、それを急速に3次元走査しうるようにする。
【解決手段】マトリックス状に多数の電磁波放射素子を設け、それらにおける各素子の電磁波パルス放射時間位相を変えて飽射方向を変えるフェーズドアレーアンテナの中心点を含む光軸(放射方向)上の任意の1点に焦点を結ばせるため、該フェーズドアレーアンテナの光軸上の任意の1点に放射された電磁波を集束させるようにする、集束用位相調整回路を設けて、アンテナから任意の距離離れた遠隔の位置に焦点を結ばせることができると同時に、放射される電磁波の縦方向制御を行ないうるようにし、かつ、放射される電磁波の横方向制御を行ないうるようにして、遠隔点状3次元電磁波照射システムにより、急速に、任意の位置に電磁波焦点を結ばせうるようにする。
(もっと読む)
マイクロ波センサ

【課題】侵入者あるいは侵入物の位置を判別可能なマイクロ波センサを提供する。
【解決手段】監視エリアを挟んで対向し、各々に異なる周波数f1,f2の第1、第2のマイクロ波を送受信する第1、第2のマイクロ波送受信機と、正常時における第1、第2のマイクロ波送受信機の各受信信号の強度特性をそれぞれ記憶し、第1、第2のマイクロ波送受信機の各受信信号及び正常時受信強度特性との比較に基づいて侵入位置を判定する判定装置とを具備する。
(もっと読む)
非接触リーダライタ装置
【課題】車両に搭載されている非接触ICカードリーダライタの電源を、ドップラ効果を利用するマイクロ波センサがかざされた非接触ICカードを検知したときに、供給するようにしたことにより、非接触ICカードリーダライタが不使用時には電源がオフされ、使用時のみ電源がオンされる非接触リーダライタ装置を提供する。
【解決手段】非接触リーダライタ装置は、非接触ICカードに対し電波を放射するアンテナを有する非接触ICカードリーダライタを備えた非接触リーダライタ装置であって、ドップラ効果を利用したマイクロ波センサを前記車両に搭載し、前記車両に接近する人体を該マイクロ波センサで検知したときに、前記非接触ICカードリーダライタへの電源を供給するようにしたことである。
(もっと読む)
検出装置、及び検出方法
【課題】侵入者の有無を確実に検出できる検出装置、及び検出方法を提供すること。
【解決手段】受信波に基づいて侵入者の有無を検出する検出装置において、前記受信波を受信して前記受信波に含まれる受信信号を出力する受信部と、前記受信信号に対して、第1及び第2の閾値により前記受信信号の周期性の有無を判断する判断部とを備え、前記判断部は、前記受信信号のレベルが前記第1の閾値を超えずに、複数回前記第2の閾値以上となったとき、前記受信信号は周期性を有するものと判断することを特徴とする。
(もっと読む)
移動支援システム
【課題】
従来のICタグを活用した自律移動支援は、目的地までの移動手段や経路を示すものであり、実際に歩行した際の軌道までは考慮されていない。
【解決手段】
移動体に設置された複数のICタグからのデータを受信し、受信した前記データを用いて前記移動体の移動を支援する移動支援システムにおいて、それぞれが、前記データの発信距離の異なる複数の前記ICタグから第1のデータおよび第2のデータを受信することが可能であって、前記移動体の移動経路に沿って設置された複数のデータ受信手段を用意し、前記複数のデータ受信手段のそれぞれにおいて、受信した前記複数のデータ受信のそれぞれにおける前記第1のデータおよび前記第2のデータの受信状況に応じて、前記移動体における移動状況を特定する。
(もっと読む)
便器洗浄装置
【課題】ドップラーセンサを用いた便器洗浄装置において、外乱による便器洗浄バルブの誤作動を少なくし、特定動体に応じた便器洗浄バルブの制御精度の低下も回避する。
【解決手段】便器洗浄装置は、ドップラーセンサ2と、ドップラーセンサ2からのドップラー信号における第1の周波数帯域Bのレベルが第1のレベルTBであることにより特定動体10を判別し、該判別に応じて便器洗浄バルブ50を制御する制御手段3とを有する。制御手段は、ドップラー信号が第1の周波数帯域より低い第2の周波数帯域Aの成分を含み、かつ第1の周波数帯域における一部の周波数部分B1のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分B2を第1の周波数帯域に再設定し、再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別する。
(もっと読む)
物体検出装置
【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
自動給水装置
【課題】単純な構成で信頼性の高いマイクロ波ドップラーセンサを備えた自動給水装置を提供する。
【解決手段】搬送波Cを送信して人体、吐水、又は尿流を検出するマイクロ波ドップラーセンサと、マイクロ波ドップラーセンサの検出結果に基づいて便器若しくは洗面器への給水部による給水を制御する制御部と、を有する自動給水装置において、マイクロ波ドップラーセンサは、搬送波Cを生成する搬送波生成部を有し、搬送波生成部は、搬送波Cの周波数を切替える切替周期を保持するタイマと、タイマが保持する切替周期毎に乱数を発生させる乱数発生器と、乱数発生器が発生した乱数に基づいて所定の搬送波Cの周波数をタイマが保持する切替周期毎に複数の周波数帯域の中から選択して切り替える周波数切替手段と、周波数切替手段が切り替えた周波数を搬送波Cに設定する周波数設定手段と、を有するとともに、搬送波Cを切替えて人体、吐水、又は尿流を検出する。
(もっと読む)
距離測定装置、距離測定方法、反射体、および通信システム
【課題】RFIDタグの距離を精度よく測定する。
【解決手段】送信制御部は、変調部を制御し、タグ応答信号の送信を要求するR/W要求信号を第1の周波数f1でRFIDタグへ送信する。RFIDタグは、第1の周波数に応じた搬送周波数からなるタグ応答信号を返信する。タグ応答信号を受信すると、位相情報取得部は、第1の受信信号を複素表現で表したx1(t)を算出し、第1の周波数f1に対応させてテーブルに記憶する。周波数制御部が、R/W要求信号を第2の周波数f2となるようにPLL部を制御する。同様にして第Nの周波数が全て確認されるまで繰り返す。位置測定部が、前記テーブルから各周波数の受信信号xn(t)を読み出し、各周波数の受信信号に基づいて相関行列Rxxを作成し、MUSIC評価関数のスペクトラムを作成することによって、ピーク値の探索を行うことによりリーダライタとRFIDタグとの距離を算出する。
(もっと読む)
吐水装置
【課題】確実に止水をすることができる吐水装置を提供する。
【解決手段】吐水部と、放射した電波の反射波によって被検知体に関する情報を取得するセンサ部と、前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、記憶手段と、を備え、前記センサ部から放射される電波の少なくとも一部は、前記吐水部から吐水される吐水流により反射され、前記制御部は、前記吐水部から吐水しているだけの時の水流状態から得られた信号に基づき決定され前記記憶手段に格納された閾値と、前記センサ部からの検知信号の値と、を比較して前記吐水部からの吐止水を制御することを特徴とする吐水装置が提供される。
(もっと読む)
所在管理システム
【課題】複数の各空間に所在管理リーダが配置され、使用者が所持する無線アクティブタグが前記リーダに一定の時間間隔でユニークな自IDを発報することで、前記各空間における該タグの移動の推移や現在位置を前記リーダ側に管理させる所在管理システムにおいて、消費電力を削減し、タグの内蔵電池の長寿命化を図る。
【解決手段】前記複数の空間に区分されたオフィスから成る第1の空間領域と、廊下から成る第2の空間領域との往来部(ドア)に、前記タグへ質問信号を送信し、応答信号が受信されることでタグの通過を検出する入退室管理リーダを設置するとともに、前記所在管理リーダは、前記自IDが受信されるとそれに対するACK信号を送信するようにし、前記タグは、前記応答信号を送信してから、前記自IDの発報に対するACK信号が受信される間は前記自IDの発報を継続し、前記ACK信号が受信されないと発報を休止する。
(もっと読む)
デュアルユースのRF指向性エネルギー兵器および撮像装置
デュアルユースのRF指向性エネルギー兵器および撮像装置を開示する。発電機が、ビームディレクターによって対象物に向けられる、RF電磁エネルギーの第1のビームを提供してもよい。撮像装置が対象物の画像を形成してもよい。撮像装置は、ビームディレクターによって規定される開口を共有してもよい。 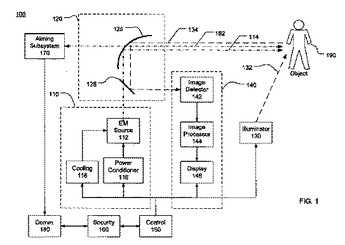 (もっと読む)
(もっと読む)
自動装置
【課題】使用者の状態に応じて複数の動作のいずれかを実行可能とした自動装置を提供する。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とを合成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下すると前記被制御部に対して第1動作を実行させる制御信号を出力し、その後、前記検知信号の周波数が上昇または上昇の後に降下すると前記被制御部に対して第2動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
(もっと読む)
自動装置
【課題】誤動作や誤検知による無駄な動作を防止した自動装置を提供する。
【解決手段】放射した送信波の被検知体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記送信波と前記受信波とに基づいて検知信号を生成するミキサ部と、前記ミキサ部から出力された検知信号の周波数を検出する周波数検出部と、前記周波数検出部による検出の結果に基づいて制御信号を出力する判定部と、前記制御信号により制御される被制御部と、を備え、前記判定部は、前記検知信号の周波数が降下し、その後、前記検知信号の周波数が上昇し、または上昇の後に降下し、または略一定値を維持した後に降下すると前記被制御部に対して第1動作を実行させる制御信号を出力することを特徴とする自動装置が提供される。
(もっと読む)
位置情報通知装置
【課題】 使い勝手に優れ、しかもランニングコストの低減を図ることができる位置情報通知装置を提供する。
【解決手段】 装置本体1の電源として充電式電池2を使用し、また、装置本体1にACアダプタ8を接続可能とし、充電式電池2を満充電まで充電し、次の使用を可能にした。また、組み込まれる充電式電池2として、10C以上の電流で急速充電できるリチウムイオン二次電池が用いられことも特徴としている。
(もっと読む)
タググループの設定方法及び移動体位置監視システム
【課題】 グループIDコードの設定が不要で、グループからの離脱が確実に検出でき、しかも離脱したタグの位置をユーザーが知ることができるタググループの設定方法を提供する。
【解決手段】 マスタタグは記憶領域として少なくとも、書き換え不能な複数ビットのIDコードを記憶する固定領域と、書き換え可能な複数ビットを有する可変領域を有し、スレーブタグは少なくとも書き換え不能で、且つマスタタグと同一ビットのIDコードを記憶する固定領域を有し、マスタタグの可変領域は、少なくともグループ情報領域を備え、当該グループ情報領域には、複数ビットのIDコードの内、グループIDコードとして使用する領域を指定する情報を設定し、タググループは、各タグ自身のIDコードの内、グループ情報領域でグループIDコード領域と指定されたIDコードの部分が同一のタグとする。
(もっと読む)
アンテナの設置構造
【課題】パッシブタグを確実に動作可能な電波を発信するアンテナの設置構造を提供すること。
【解決手段】探索領域R11〜R13の中央部O1〜O3の斜め上方に設けられたアンテナA1〜A3が、探索領域R11〜R13に向けて設置され、斜め下方に位置する探索領域R11〜R13にUHF帯域の電波を放射する。探索領域R11〜R13に存在するパッシブタグPの上方が遮蔽されていたり、パッシブタグPの指向性がその斜め上方に位置するアンテナA1〜A3の方向に向いていなかったりしたとしても、探索領域R11〜R13内のパッシブタグPが確実に動作する。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
レーダ装置
【課題】複数のレーダモジュールを設けることなく、周囲の物体の有無及び方位を検知するレーダ装置を提供する。
【解決手段】レーダ装置は、車両に設けられ、レーダ信号を送信し、送信されたレーダ信号の反射信号の少なくとも一部を受信信号として受信し、受信信号に基づいて周囲の物体を検知するレーダモジュール2を備える。レーダモジュール2は、中心周波数26GHzを有するレーダ信号と中心周波数29GHzを有するレーダ信号とを発生して送信し、各レーダ信号に対応する受信信号を比較することによって周囲の物体の有無及び方位を検出するレーダ信号送受信部4と、レーダ信号送受信部4を保護するためのレドーム5とを備える。ここで、レーダ信号送受信部4は、中心周波数26GHzを有するレーダ信号と中心周波数29GHzを有するレーダ信号とを時系列的に切り替えて送信する。
(もっと読む)
341 - 360 / 687
[ Back to top ]