
Fターム[5J070AH04]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | 検出一般 (2,394) | 相関 (618)
Fターム[5J070AH04]の下位に属するFターム
PRF相関 (45)
Fターム[5J070AH04]に分類される特許
101 - 120 / 573
速度推定装置及びコンピュータプログラム及び速度推定方法
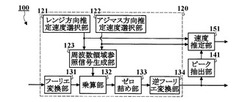
【課題】合成開口レーダによって観測された観測対象の速度を正しく推定する。
【解決手段】圧縮観測算出部(アジマス圧縮部120)は、複数の推定速度それぞれについて、上記受信信号から生成された所定のサンプリング間隔を有する一連の観測値と、上記推定速度に対応する参照信号との間の相関を取ることにより、上記所定のサンプリング間隔よりも短いサンプリング間隔を有する一連の圧縮観測値を算出する。ピーク抽出部141は、上記複数の推定速度それぞれについて、上記圧縮観測算出部が算出した一連の圧縮観測値のピークを抽出する。速度推定部151は、上記複数の推定速度のなかから、上記ピーク抽出部141が抽出したピークが極大となる推定速度を求めて、上記観測対象の推定速度とする。
(もっと読む)
移動体特定装置、移動体特定プログラム及び移動体特定方法

【課題】SAR画像データに含まれる移動体と、送信情報を送信した移動体とを高精度に対応付けすることを目的とする。
【解決手段】画像情報計算部2は、SAR画像から、前記SAR画像に含まれる移動体の速度を計算し、計算した速度に基づきその移動体の位置を計算する。補完情報特定部3は、移動体から送信された送信情報から、前記SAR画像が撮像された際のその移動体の位置を特定する。そして、相関度計算部4は、画像情報計算部2が計算した位置と、補完情報特定部3が特定した位置との相関度を計算し、対応付部5は、相関度計算部4が計算した相関度に基づき、SAR画像に含まれる移動体と送信情報を送信した移動体とを対応付ける。
(もっと読む)
移動体の計測方法および計測装置
【課題】移動体の移動方向および移動速度を計測できる範囲を大きく確保でき移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および装置を提供する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてゴルフボール2に向けて送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測処理部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出する。
(もっと読む)
受信装置
【課題】パルス幅が狭い応答を受信した場合にも信頼性ある応答を解析する。
【解決手段】実施形態に係る受信装置は、所定形式の複数のパルスで形成されるプリアンブルと当該プリアンブルに続く複数のパルスで形成されるデータブロックとから成る信号を受信して解析する受信装置である。受信装置は、相関処理部と、パルス幅カウンタ部と、データ解析処理部とを備えている。相関処理部は、受信信号と所定形式との相関を求めて、受信信号からプリアンブルを検出する。パルス幅カウンタ部は、検出されたプリアンブルの各パルスのパルス幅を求める。データ解析処理部は、プリアンブルが検出されると、受信信号から検出されたプリアンブルに続くデータブロックをプリアンブルの各パルス幅の平均値を基準に解析するとともに、各パルス幅の平均値を基準に受信信号の信頼性を判定する。
(もっと読む)
精測進入レーダ及びレーダ制御方法
【課題】簡単な操作により管制対象となる航空機の追跡処理に移行させること。
【解決手段】本実施形態に係る精測進入レーダは、電子走査式空中線1からレーダ波を送信し、目標からの反射波を受信するレーダ送受信機2と、反射波の受信信号からレーダビデオデータを作成するビデオ作成部32と、受信信号をもとに目標を検出し、検出された目標のうち予め決められた上限数以下のターゲットデータを出力する目標検出部33と、レーダビデオデータに基づいてレーダビデオを表示し、ターゲットデータに基づいてシンボルを重畳表示するレーダ表示部5と、レーダ表示部5による表示に基づいてオペレータにより指定される追跡目標の指定情報を入力する入力部6とを備え、レーダ表示部5は、追跡目標としてシンボル以外のビデオ部分が指定された場合は、当該ビデオ部分の位置情報を含む追跡指示コマンドを発行する。
(もっと読む)
精測進入レーダ及びレーダ表示処理方法
【課題】目標検出処理により検出された目標を運用者が容易に識別できるようにする。
【解決手段】精測進入レーダは、電子走査式空中線1からレーダ波を送信し、その反射波を受信するレーダ送受信機2と、反射波の受信信号をもとに目標を検出し、検出された目標のうち予め決められた上限数以下のターゲットデータを出力する目標検出部33と、受信信号からレーダビデオデータを作成し、目標検出部33により検出された目標の位置情報に基づいて、レーダビデオデータに検出フラグを付加するビデオ作成部32と、レーダビデオデータをもとに検出フラグの有無に応じてレーダビデオの表示態様を変更し、ターゲットデータに基づいてシンボルを重畳表示するレーダ表示部5とを具備する。
(もっと読む)
レーダ装置
【課題】測定距離レンジを拡大し、全ての測定距離レンジの測定に必要な測定時間を従来よりも短縮するレーダ装置を提供する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。第1符号長の第1符号系列と、第1符号系列より長い第2符号長の第2符号系列と、第1符号系列の各符号を反転した第3符号系列とのうち、第1送信周期で第1符号系列を変調した第1送信信号を、第2送信周期で第2符号系列を変調した第2送信信号を、第3送信周期で第3符号系列を変調した第3送信信号を、第4送信周期で第2符号系列を変調した第4送信信号を、第1、第3送信周期は第2、第4送信周期よりも短い周期で生成する。この生成された各送信信号を高周波送信信号に変換して送信アンテナから送信する。
(もっと読む)
レーダ装置
【課題】測定対象のターゲットが移動する場合でも低レンジサイドローブ特性を維持し、複数のターゲットの検出における分離性能の劣化を抑圧するレーダ装置を提供する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。符号生成部は、相補符号のペアとなる第1の符号系列と第2の符号系列を生成する。第1変調部は、第1符号系列を変調して第1送信信号を生成する。第2変調部は、第2符号系列を変調して第2送信信号を生成する。直交変調部は、生成された第1、第2送信信号を用いて直交変調を行う。直交変調された信号から高周波送信信号を生成し、送信アンテナから送信する。
(もっと読む)
レーダ装置
【課題】従来のレーダ装置は、帯域幅を広げるため、複数レーダの観測信号に帯域の内挿・拡張を行うが、各レーダでの観測信号の位置ずれと位相ずれを推定して補償し、精度良く位置あわせと位相あわせを実施する必要がある。しかし信号対雑音電力比の低い環境では帯域の内挿・拡張の性能が著しく低下する。
【解決手段】それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、各レーダの信号に対して、信号空間の共分散行列を推定する共分散行列推定手段と、推定された各レーダの信号に対する共分散行列を合成する共分散行列合成手段と、合成された合成共分散行列を用い、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
(もっと読む)
レーダ装置
【課題】異る周波数変調率で変調された受信ビート信号のビート周波数を組合せて目標距離を算出するレーダで、異る目標の振幅値及び測角値が閾値以内では目標の正しい組合せができず、又複数目標のビート周波数差がビート周波数分解能以下では信号を分離できない。
【解決手段】アンビギュイティのない距離分解能と、ビート周波数分解能からのパラメータで選択した周波数変調率で複数のPRIに亘りチャープ状に周波数変調されたキャリア信号を放射、目標での反射信号を受信し、キャリア信号で変換した受信ビート信号にPRI間FFTを行い作成したPRI内距離−ビート周波数マップから、検出した目標候補同士を組合せ、目標候補のビート周波数の組合せからアンビギュイティのない距離及び速度を算出、アンビギュイティのない距離によりPRI内距離の距離アンビギュィティを解消し目標との距離を算出する。
(もっと読む)
レーダ装置
【課題】ターゲットにより反射された信号の直交検波後のI信号とQ信号との間に生じる位相ずれ量をリアルタイム且つ適正に補正し、ターゲットの到来角度の推定精度の劣化を抑制する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。所定の符号長の符号系列を分割したサブ符号長を有する第1、第2サブ符号系列と、第1、第2サブ符号系列にそれぞれ2種類の異なる係数を乗じた第3、第4、第5、第6サブ符号系列とから、第1送信周期では、第3サブ符号系列と第4サブ符号系列とを連結した符号を変調した第1の送信信号を生成する。第2送信周期では、第4サブ符号系列と第5サブ符号系列とを連結した符号を変調した第2の送信信号を生成する。生成された第1及び第2の送信信号を高周波送信信号に変換し、送信アンテナから送信する。
(もっと読む)
イベント検出装置
【課題】電波の状態を監視することによって、そこに存在する人や物の状態の違いをも識別することができる高い精度を持つイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルを入力して状態を判別するSVM(サポートベクターマシン)24と、SVM24の出力の連続性を考慮してイベントを検出するイベント検出手段25と有するイベント検出装置。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
レーダ情報処理装置及びレーダ情報処理プログラム
【課題】管制対象とする航空機目標を速やかに自動追跡に移行できるようにする。
【解決手段】レーダ情報処理装置3は、ASR/SIF(SSR)装置1から第1の更新レートで更新される第1のレーダ情報を受信し、PAR装置2から上記第1の更新レートより高い第2の更新レートで更新される第2のレーダ情報を受信し、第1のレーダ情報と航空機の飛行計画情報とを対応付ける第1の相関処理部31と、第1のレーダ情報をもとに第1の更新レートより短い周期で航空機の位置を予測する追跡処理部32と、追跡処理部32により予測された位置をもとに第1のレーダ情報と第2のレーダ情報とを対応付ける第2の相関処理部とを備える。
(もっと読む)
画像表示装置
【課題】差分画像または干渉画像内の移動目標の視認性の向上を図るとともに、原画像の画像情報を差分画像または干渉画像の情報と共に併せて確認することが可能な、画像表示装置を得る。
【解決手段】同じ撮像エリアを含む複数の原画像1,2に対して位置合わせを行うレジストレーション部3と、それらの位相補正を行う位相補正部4と、位置合わせおよび位相補正が行われた原画像1,2を用いて、それらの画像の差分画像であるDPCA画像8(または干渉画像)を作成する差分画像生成部5と、当該DPCA画像8に利得を付与する利得付与部6と、原画像1,2の各々および作成されたDPCA画像8(または干渉画像)に、互いに異なる配色(赤、青、緑)を割り当て、それらを重畳して表示する画像重畳部7とを備えている。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
クラッタ抑圧装置とレーダ装置
【課題】広帯域レーダのレンジプロファイルから固定クラッタを効果的に抑圧するクラッタ抑圧装置の提供。
【解決手段】レーダの検出パルスの反射波のレンジプロファイルが受信されると、区間閾値判定手段12は各レンジプロファイルをセルに区画し、各セルのセル内における反射波の強度の平均値が所定の閾値Thを超えたか否かを判定する。生起確率算出手段13は、所定数の検出パルスについて、セル毎に閾値Thを超えた回数を計数し、当該計数値から、各セルにおいて、一定時間内に反射波の強度の平均値が閾値Thを超える生起確率を算出する。加重積分処理手段14は、所定数のレンジプロファイルについてセルごとに、当該セルに対する生起確率を重み係数として加重積分することによって、積分レンジプロファイルを出力する。
(もっと読む)
二次監視レーダ
【課題】オールコール期間にモードS応答の多重検出が発生した場合に信号の適否を判定して航空機の捕捉に有効に利用する。
【解決手段】候補機リストを記憶する候補機リスト記憶部135hと、受信手段がオールコール期間に受信した応答信号が含む航空機のモードSアドレスが、候補機リストに含まれる候補機のモードSアドレスと一致するか否かを判定するアドレス判定手段135cと、アドレス判定手段で応答信号が含む航空機のモードSアドレスと候補機のモードSアドレスとが一致すると判定されると、応答信号の受信タイミングが、候補機リストで候補機のモードSアドレスと関連付けられる相関範囲に含まれるか否かを判定する相関判定手段135dと、相関判定手段で応答信号の受信タイミングが相関範囲に含まれると判定されると、航空機のモードSアドレスを追加してロールコール捕捉対象リストを更新する更新手段135fとを備える。
(もっと読む)
拡張スキッタ受信装置
【課題】誤検出による拡張スキッタの検出率の低下を防止する。
【解決手段】受信信号を特定する振幅値のデータを2値化して、2値化データとして出力する2値化処理手段12eと、2値化データを入力すると、当該2値化データから拡張スキッタのプリアンブルを特定する所定のパルスパターンの有無を検出する検出手段121と、受信信号を特定する位相値のデータを入力すると、当該位相データから拡張スキッタのプリアンブルを構成するパルスの相関性の有無を判定する相関処理手段122と、検出手段で所定のパルスパターンが有と判定されるとともに、相関処理手段で相関性が有と判定されると、2値化データをデコードして拡張スキッタとするデコード手段12hとを備える。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
101 - 120 / 573
[ Back to top ]