
Fターム[5J070AK23]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 遭難対策 (23)
Fターム[5J070AK23]に分類される特許
1 - 20 / 23
被災者救助支援システム、情報処理方法
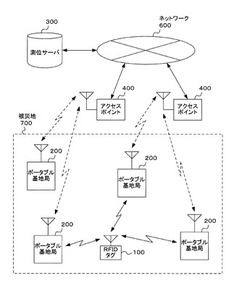
【課題】地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導

【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
携帯機検知システム
【課題】比較的簡素な構成で、応答性よく携帯機の位置を検知することができる携帯機検知システムを提供する。
【解決手段】車両の進行方向を長手方向とする第1エレメント21と、車両の進行方向及び鉛直方向に垂直な方向を長手方向とし、第1エレメントに電気的に直列接続された第2エレメント22と、第1エレメント21と第2エレメント22の接続点に一端が接続された迂回配線200とを含むアンテナ20と、第1エレメント21に電力を供給する第1電力供給状態、第2エレメント22に電力を供給する第2電力供給状態、第1エレメント21及び第2エレメント22に電力を供給する第3電力供給状態の、3つの電力供給状態を切り換えると共に、電力供給状態を切り換えた際の携帯機からの応答信号に基づいて携帯機の位置を検知する携帯機検知手段(携帯機検知回路11、CPU12)を備える。
(もっと読む)
SAR(SyntheticApertureRadar)重畳データ生成装置、SAR重畳データ再生装置、SAR重畳データ生成プログラム、SAR重畳データ再生プログラム、SAR重畳データ生成方法およびSAR重畳データ再生方法
【課題】SAR(合成開口レーダー)と光学センサとによる同時観測においてSAR画像と同じデータ量でSAR画像と光学画像とを伝送し、地上での画像再生処理においてSAR画像と光学画像とを別々に画像化できるようにすることを目的とする。
【解決手段】SAR/光学観測衛星110では、(1)SAR111と光学センサ112とにより地上の同じ地域を観測し、(2)SAR/光学伝送装置200によりSAR111の観測データと光学センサ112の観測データとを重畳させた重畳データを生成し、(3)重畳データをダウンリンクする。地上センタ120では、(4)SAR/光学再生装置300により重畳データからSAR画像と光学画像とを再生する。(2)においてSAR/光学伝送装置200は、光学センサ112で撮像した光学画像に対してSAR再生処理の逆処理をし、逆処理した光学画像を符号化して光学センサ112の観測データを生成する。
(もっと読む)
位置検出装置
【課題】 人や物、動物といった種々の対象に適用することができ、簡易なシステム構成で、容易に位置検出できる実用性の高い位置検出装置を得る。
【解決手段】 車載機1は、小電力データ通信可能な無線部11と、無指向性アンテナ部12と、識別情報を含む信号を生成しアンテナ部12を介して全方位に電波出力させる制御部13と、送信側制御部を駆動する操作部14を有し、移動機2は、車載機1の送信電波を受信可能な高指向性アンテナ部22と、受信電界強度を検出する無線部21と、識別情報から受信電波を判別し、受信電界強度から自動車Cとの距離およびアンテナ部22の向きに応じた位置信号を出力する制御部23と、位置信号を受けて自動車Cの遠近情報を表示する表示部25と、位置表示要求信号を出力する操作部24を設ける。
(もっと読む)
特定装置、特定プログラム及び特定方法
【課題】災害等の現象が発生した領域を特定することを目的とする。
【解決手段】測定データ入力部110は、観測エリアに対して、偏波特性の異なる複数の電波が反射して得られる散乱波の少なくとも2種類の偏波成分を測定した結果であって、A時点において測定した結果である測定データAと、A時点と異なるB時点において測定した結果である測定データBとから抽出された散乱成分を、それぞれ散乱成分Aと散乱成分Bとして入力する。散乱波差計算部140は、観測エリアにおける所定の領域毎に、散乱成分Aと散乱成分Bとの差を示す散乱成分差を計算する。領域特定部150は、観測エリアのうち、散乱成分差が閾値よりも大きい領域を、所定の現象が発生した領域として特定する。
(もっと読む)
出口誘導システム
【課題】複数の被誘導者を、少ない負担で円滑かつ迅速に最適な出口へ誘導する。
【解決手段】複数の移動局タグT1〜3と、移動局タグTに対し無線通信により情報送受信を行う固定局リーダR1〜4とを有し、移動局タグTを所持する複数の人物P1〜3に対し出口E1,E2への誘導を行う出口誘導システム1であって、固定局リーダR1〜4で受信した電波信号に基づき移動局タグT1〜3の位置検出を行い、その位置検出結果に基づき各移動局Tから出口E1,E2までの距離を算出し、その算出結果に基づき各移動局Tごとに所定の出口E1,E2を決定して割り当て、その割り当て結果に基づき出口E1,E2それぞれに振り分けられた移動局タグTの数を算出し、その算出結果に基づき各出口E1,E2に振り分けられた移動局タグTの数と当該出口Eで受け入れ可能な人物Pの数とを比較する。
(もっと読む)
保護者管理システム
【課題】通信に係わる構成を複雑化することなく、被保護者の迷子・離脱防止を図る。
【解決手段】保護者管理システム1は、保護者P1とともに所定の移動可能領域を移動可能な移動局タグT1と、被保護者P2,P3とともに移動可能な移動局タグT2,T3と、リーダアンテナ12を備えた固定局リーダR1〜4とを有し、移動局タグT1〜T3から送信され固定局リーダR1〜4で受信した電波信号に基づき、移動局タグTの位置検出を行い、その位置検出結果に基づき、移動局タグT1と移動局タグT2,T3との間の距離を検出し、検出された距離が、所定の警報距離以上であるか否かを判定し、判定が満たされた場合、対応する警報指示信号を生成し出力する。移動局タグT1は、警報指示信号に応じて、対応する警報表示を行うとともに移動局タグTの位置を地図上において表示する表示部DPを備える。
(もっと読む)
位置検出システム
【課題】海洋上においても送信機の位置を正確かつ確実に検出し得る位置検出システムを提供する。
【解決手段】互いに異なる位置に設置されると共に海洋に向けて出力したレーダ信号S2および受信した反射信号S3に基づいて海洋における表層海流の状態を測定する海洋レーダ2A,2Bと、海洋レーダ2A,2Bに通信回線を介して接続されて海洋レーダ2A,2Bによって測定された表層海流の状態に基づく処理を含む所定の処理を実行する基地局3とを備え、海洋レーダ2A,2Bは、海洋上の送信機1から送信された救助信号S1を受信可能に構成されると共に、受信した救助信号S1の発信方位を特定して発信方位を示す方位データD1を出力可能に構成され、基地局3は、海洋レーダ2A,2Bから出力された方位データD1に基づいて救助信号S1の発信位置を検出する位置検出処理を実行する。
(もっと読む)
装置間距離判定システム、無線端末装置、プログラム及び記憶媒体
【課題】簡単な構成で、少なくとも2種類の境界において無線端末装置間距離の境界判定を行う。
【解決手段】無線端末装置10の送信部12がN(N≧2)種類の送信電力の無線信号を送信する。無線端末装置20は受信部22で無線信号を受信し、その距離判定部24が、何種類の送信電力の無線信号が無線端末装置の受信部22に受信されたかを判定することにより、無線端末装置10と無線端末装置20との間の距離を判定し、その判定結果に基づき、本体部25の或る機能をロックしたり、本体部25に警告情報を出力させたりする。
(もっと読む)
ソーラー電池式移動障害物遠隔感知機
【課題】
従来から山間部やビルの間での視界不良のカーブや交差点で、反対側から来る車などの移動物の早期発見が困難であった。これは電源がないのと、レーダーやセンサの応用がなされていなかった為で、これらを可能とした装置を提供するものである。
【解決手段】
電源にソーラー電池を利用、主柱パイプにレーダー及センサを装着、それに点滅ライトを連結させ、移動する障害物をレーダーとセンサが感知し、自動的に必要な方向のライトを点灯、更に自動的にLED文字板の文字を表示、大型設置工事を必要とする事なく、種類も目的に応じ置床用か壁掛用かを選定して使用でき、設置も容易な構造を特徴とする、ソーラー電池式移動障害物遠隔感知機が完成できた。
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
物体探索装置、物体探索システム及び無線通信端末
【課題】 予め探索対象物体(例えば、物品、生物、人間など)の位置情報を登録することなしに、その探索対象物体が現在何処にあるのかを明らかにする物体探索システムを提供する。
【解決手段】 本発明による物体探索システムは、探索対象物体を探索する物体探索装置と、探索対象物体に付けられている無線タグとを備える物体探索システムであって、物体探索装置は、無線タグと通信をする無線通信手段と、無線タグと電波を送受信する際の電波情報に基づいて無線タグとの間の距離を測定する手段と、距離を測定した測定位置の位置情報を取得する手段と、2以上の異なる測定位置において距離が測定されると、距離と測定位置の位置情報とに基づいて探索対象物体の位置を推定する手段と、推定された位置に関する情報を出力する出力手段とを有することを特徴とする。
(もっと読む)
方向探索システム
【課題】簡易な操作で目的の自動車が存在する方向を示すことができる方向探索システムを提供する。
【解決手段】第1回目のスキャンで、スイッチ31を押しながらスマートキー等の鍵金属部を指向性のあるアンテナ10として利用した端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信し、その最大受信レベルをピーク検出保持部27に保持する。第2回目のスキャンでは、スイッチ31を離し、再び端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信する。このとき、レベル検出部25で検出した受信レベルを比較部28に与え、第1回目のスキャン結果で保持された最大受信レベルと比較する。そして、受信レベルが最大受信レベルにほぼ等しくなったときに、探索が達成したことを表示部40に表示する。
(もっと読む)
無線タグ利用計測器管理システム
【課題】比較的離れた距離でも通信可能なアクティブ型無線タグを用いるが、使用中の計測器を誤動作させず、また計測データに影響を与えない態様で、計測器の捜索、棚卸し、貸出・返却、持出防止などの管理が行える無線タグ利用計測器管理システムを得ること。
【解決手段】計測器にアクティブ型の無線タグを添付し、タグリーダから問い合わせ信号を送信して前記計測器の管理を行う無線タグ利用計測器管理システムであって、無線タグは、通常の待機時においては、所定期間のスリープモードとタグリーダからの問い合わせ信号の受信を監視する受信モードとを交互に繰り返す。タグリーダは、スリープモードの時間間隔よりも十分に長い時間内問い合わせ信号を送信する。
(もっと読む)
アクティブ受信機検出及びレンジング
遠く離れて位置付けられる無線受信機(100)を能動的に検出して、そのレンジを決定する方法(500)及びシステム(402)が提供される。本発明は、また、遠隔の受信機(100)が送信信号を受信しているかどうかと、受信機(100)への通信リンクを確立するのに必要とされる最小必要送信電力とを決定する方法及びシステムを提供する。最後に、本発明は、また、マルチパスによる方向あいまい性を解消する方法及びシステムを提供する。 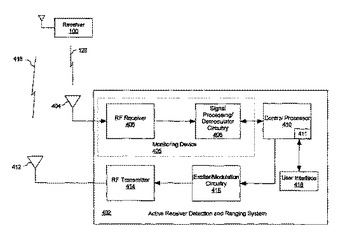 (もっと読む)
(もっと読む)
半導体装置、及び半導体装置を用いた位置検出システム
【課題】無線通信を行って、RFIDが空間において存在するか存在しないか、またそのRFIDが所有しているIDなどの情報を取得するほか、そのRFIDの位置を特定する。
【解決手段】複数の質問器とサーバーとをネットワーク接続して、位置検出システムを構築する。RFIDと質問器とで無線通信を行うことで、各質問器からRFIDまでの距離を求め、その距離のからRFIDの位置を求める。質問器からRFIDまでの距離を算出するには、RFIDで質問器から受信した信号の振幅に応じた周波数で信号を発振させる。RFIDで発振している信号の周波数を、RFID内でまたは質問器で検出することにより、質問器からRFIDまでの距離を検出する。
(もっと読む)
ビーコン受信機及びビュアーシステム
【課題】 ビーコン送信機を持った被写体を探すために、受信装置を見たり、双眼鏡を見たりする煩わしさを解消することができるビーコン受信機及びビュアーシステムを提供する。
【解決手段】 ビーコン受信機は、ビーコン受信部11Aがビーコン電波を受信して複数の方向の電波強度を検出すると、判定部21が検出された電波強度データに基づいて電波強度が最大の方向を判定して最大の電波強度とその方向を含むビーコン受信情報を出力し、情報可視化部15はビーコン受信情報を入力して可視化する一方、風景取り込み部13が所定の被写体の画像を取り込むと、重畳部14が情報可視化部で可視化されたビーコン受信情報と風景取り込み部で取り込まれた画像情報とを重畳し、ビュアー部12は重畳された情報を表示するように構成されている。ビュアーシステムはビーコン送信機と上記のビーコン受信機とでシステムを構成したものである。
(もっと読む)
超ワイドバンド信号を時間的位置において安定化する方法及びこれを実施する生存物監視レーダー
本発明は、捜索及び救出作業に係り、瓦礫の積極的測量に使用できる。本発明は、探索作業に影響を及ぼす温度やオペレータの手の動きや震えに関連した干渉保護を改善できるようにする。本発明の方法は、基準信号に基づいて超帯域巾信号(UBW)を形成し、このように形成されたUBW信号を空間へ放出し、UBW信号を受信し、UBW信号を、基準UBW信号との相関により処理し、受信したUBW信号を処理する間に、基準UBW信号を、前記相関された信号の最大電圧と最小電圧との間の中間セクタにチェックポイントの初期位置をセットする時間だけ、遅延させ、前記チェックポイントの位置を周期的に監視し、そしてチェックポイントの位置が初期位置からずれているときには、前記整形された超ワイドバンド信号の空間への送信の遅延を変更して、チェックポイントの位置をリセットすることで構成される。 (もっと読む)
1 - 20 / 23
[ Back to top ]